一种六自由度液压机械手有限时间跟踪控制方法
1.本发明属于自动化技术及控制领域,具体涉及一种六自由度液压机械手有限时间跟踪控制方法。
背景技术:
2.电液伺服系统的自适应控制就是能够自行消除系统本身的不确定性对电液伺服系统系统造成的影响,且恢复到合理性能指标的控制技术。自适应控制对于复杂的工程系统,如地铁驾驶系统、飞行器控制系统、化工系统等,具有特别重要的研究价值。因此,自适应控制受国内外学者的极大关注,成为目前控制领域中的一个重要方向。近年来人们在自适应控制方面的研究取得了很多的进展文献[1]-[3],
[0003]
liul,gaot,liuyj,etal.time-varyingiblfs-basedadaptivecontrolofuncertainnonlinearsystemswithfullstateconstraints.automatica,2021,129:109595.
[0004]
aboutalebianb,talebiha,etedalis,etal.adaptivecontrolofteleoperationsystembasedonnonlineardisturbanceobserver.europeanjournalofcontrol,2020,53:109-116.
[0005]
sunzy,pengy,wenc,etal.fastfinite-timeadaptivestabilizationofhigh-orderuncertainnonlinearsystemwithanasymmetricoutputconstraint.automatica,2020,121:109170。
[0006]
文献[4]zhouj,wenc,wangw.adaptivecontrolofuncertainnonlinearsystemswithquantizedinputsignal.automatica,2018,95:152-162.;针对存在输入量化的不确定非线性系统,提出了一种新的自适应控制器。文献[5]liuw,xief.backstepping-basedadaptivecontrolfornonlinearsystemswithactuatorfailuresanduncertainparameters.circuits,systems,andsignalprocessing,2020,39(1):138-153.在考虑执行器故障的基础上,解决了一类非线性参数系统的自适应控制问题。然而,上述研究忽略了系统中具有未知非线性函数的非线性系统的自适应控制问题。在实际工程中,由于系统变量太多或者难以建立复杂控制系统的数学模型以及时常存在的外界扰动和难以测量的系统状态。因此,研究基于输出反馈的不确定非线性系统的模糊自适应控制是非常重要和不可缺少的。
技术实现要素:
[0007]
为解决上述问题,本发明提供了一种六自由度液压机械手有限时间跟踪控制方法,并且提出了一类更一般的n维不确定非线性系统在未知外界扰动下的自适应控制方法;通过引入迟滞量化器,提出了一种新的自适应控制方案;并且利用设计的复合扰动观测器对未知外界扰动进行估计。
[0008]
本发明的自适应控制器能够保证闭环系统内所有信号的有限时间稳定;最后,以
一个实际的液压伺服系统为例进行了仿真,验证了所提出的控制技术的有效性。
[0009]
实现本发明目的的技术解决方案为:液压伺服系统的量化输入自适应抗干扰控制算法设计,包含以下步骤:
[0010]
步骤1,介绍了六自由度并联液压机械手的数学模型;
[0011]
步骤2,介绍了电液伺服系统的数学模型;
[0012]
步骤3,建立了一种更一般的具有量化输入的非线性系统;
[0013]
步骤4,提出一种迟滞量化器来量化输入信号以减少抖动,对于未知的外部扰动设计了扰动观测器,提出命令滤波方法避免传统反步法中的“复杂性爆炸”问题;
[0014]
步骤5,自适应控制器的设计与稳定性分析;
[0015]
步骤6,对六自由度并联液压机械手的电液伺服系统进行仿真研究,验证本研究所提出控制方法的有效性。
[0016]
本发明进一步改进在于:所述步骤1中:建立六自由度并联液压机械手的数学模型:stewart平台与基座由六个可伸缩接头连接,由液压执行器驱动;在板块和可伸缩腿的连接处是万向节;机器人动力学由拉格朗日方法导出的二阶非线性微分方程控制,在笛卡尔空间中可以表示为:
[0017]
机械臂动力学由如下非线性方程定义:
[0018][0019]
其中状态向量q=[x
p
,y
p
,z
p
,α,β,γ]
t
是一个具有三轴线性平移和旋转元素的向量,m(q)∈r6×6是惯性矩阵,是科氏力和离心力向量,g(q)∈r6是重力,τ∈r6是施加于关节上的控制力矩的向量,j(q) 将力τ从关节空间映射到笛卡尔空间的雅可比矩阵。
[0020]
本发明进一步改进在于:所述步骤2中,建立液压伺服系统的数学模型;气缸的平衡方程为:
[0021][0022]
当电液伺服系统正常运行时,系统向外泄漏很小:因此,忽略了后续推导过程中的向外漏:那么,气缸的流动连续性方程是:
[0023][0024]
伺服阀的阀芯位移xv与负载流量q
l
之间的关系可以描述为:
[0025][0026]
通常伺服阀的工作频率要比液压缸的工作频率高得多;因此,使用以下近似:
[0027]
xv=k
xv
u,
[0028]
其中kq是在不同性能点变化的阀门流量增益,所以有:
[0029]
[0030]
当考虑伺服阀为零电平系统时:
[0031]
xv=k
ui
u。
[0032]
选择负载位移x
p
、荷载速度和负载压力p
l
作为状态变量,对于电液伺服系统,有于是电液伺服系统可被重新描述为:
[0033][0034]
其中
[0035]kq
是在不同性能点变化的阀门流量增益;
[0036]
控制目标是为六自由度液压机械手的电液伺服系统构造一种自适应控制方法,考虑到控制器量化输入和未知外界扰动时,仍然可以保证电液伺服系统的稳定性。
[0037]
本发明进一步改进在于:所述步骤3中,提出一种迟滞量化器来量化输入信号以减少抖动:
[0038][0039]
其中x(t)=[x1(t),...,xn(t)]
t
∈rn为系统的状态, fi:ri×rn
→
r,i=1,2,...,n是未知光滑函数,是已知函数; y为系统输入,系统只有输入y可测;
[0040]
本发明选择的迟滞量化器为:
[0041][0042]
其中ui=ρ
1-iumin
(i=1,2,...),δ=(1-ρ)/(1+ρ),u
min
》0且0《ρ《1;q(u)的死区范围是由参数u
min
决定的,q(u)∈u={0,
±
ui,
±
ui(1+δ),i=1,2,...};参数ρ是量化密度的度量。
[0043]
本发明进一步改进在于:所述步骤4中,
[0044]
在步骤3中因为是未知光滑的非线性函数,所以在步骤4 中需要利用模糊逻辑系统对进行估计,
[0045]
系统中的未知非线性项用模糊逻辑系统(flss)描述如下,if-then 规则:
[0046]rl
:如果x1是x2是是则ya为a
l
,l=1,2,...,n其中和a
l
分别是与模糊函数和相关的模糊集,n是模糊规则数.通过单点模糊化、中心加权平均解模糊化、乘积推理,模糊逻辑系统为其中满足
[0047]
定义模糊基函数为令令则模糊逻辑系统可以表示为:
[0048]
状态观测器设计为:
[0049][0050][0051]
其中为扰动观测器,li待设计参数;
[0052]
扰动观测器设计为其中ωi为辅助变量,是ωi的估计量,ki为待设计参数;
[0053]
状态观测器及扰动观测器的设计步骤为:。
[0054]
选取如下lyapunov函数
[0055][0056]
对其求导得
[0057][0058][0059]
其中
[0060]
可知,所设计的模糊状态观测器不能保证观测器误差的收敛性;因此,在下一步骤中,我们将设计一个控制器来保证闭环系统在有限时间稳定的意义下的稳定性;
[0061]
有限时间命令滤波器如下所示:
[0062][0063][0064][0065]
其中αi是输入,l
i,1
和l
i,2
是正常数,x
i+1,c
(t)=ξ
i,1
(t)且是输出。
[0066]
然后,误差补偿信号γi设计为:
[0067]
[0068][0069][0070]
其中ci,ai,β是待设计的参数。
[0071]
本发明进一步改进在于:所述步骤5中,设计了自适应控制器:
[0072][0073]
以及参数θi的自适应律为:
[0074][0075]
并且在稳定性分析部分证明了本发明所设计的自适应控制器可以保证闭环系统的有限时间稳定。
[0076]
本发明与现有技术相比,其显著优点为:
[0077]
(1)本文所提出的控制器能使系统达到有限时间稳定;提高在实际系统中的控制效率。
[0078]
(2)针对传统反步设计过程中存在的“复杂性爆炸”问题,提出了命令过滤方法,简化了控制器的设计。
[0079]
(3)本文设计的量化控制器可以减轻系统中信号传输的负担。
附图说明
[0080]
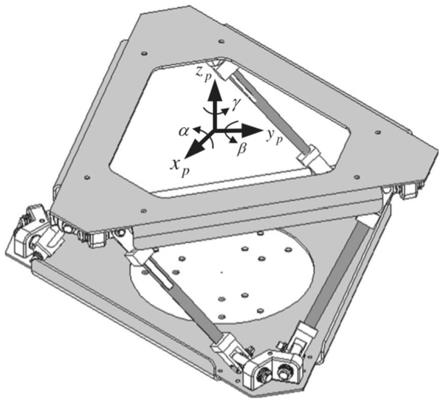
图1是六自由度并联液压机械手系统;
[0081]
图2是电液伺服系统;
[0082]
图3是输出y和参考信号yr的轨迹;
[0083]
图4是状态变量x1及其它的估计的轨迹;
[0084]
图5是跟踪误差z1的轨迹。
具体实施方式
[0085]
下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
[0086]
以下将结合附图,本实施例提供一种六自由度液压机械手有限时间跟踪控制方法,包含以下步骤:
[0087]
步骤1,介绍了六自由度并联液压机械手的数学模型;
[0088]
stewart平台示意图如图1所示。平台与基座由六个可伸缩接头连接,由液压执行器驱动。在板块和可伸缩腿的连接处是万向节。机器人动力学由拉格朗日方法导出的二阶非线性微分方程控制,在笛卡尔空间中可以表示为:
[0089]
机械臂动力学由如下非线性方程定义:
[0090][0091]
其中状态向量q=[x
p
,y
p
,z
p
,α,β,γ]
t
是一个具有三轴线性平移和旋转元素的向量,m(q)∈r6×6是惯性矩阵,是科氏力和离心力向量,g(q)∈r6是重力,τ∈r6是施加于关节上的控制力矩的向量, j(q)将力τ从关节空间映射到笛卡尔空间的雅可比矩阵。
[0092]
步骤2,介绍了电液伺服系统的数学模型;
[0093]
典型电液伺服系统如图2所示,系统由一个双杆气缸、一个4/3 路伺服阀和一个负载组成,下面将给出非线性动力学模型。
[0094]
气缸的平衡方程为:
[0095][0096]
当电液伺服系统正常运行时,系统向外泄漏很小。因此,忽略了后续推导过程中的向外漏。那么,气缸的流动连续性方程是:
[0097][0098]
伺服阀的阀芯位移xv与负载流量q
l
之间的关系可以描述为:
[0099][0100]
通常伺服阀的工作频率要比液压缸的工作频率高得多。因此,使用以下近似:
[0101]
xv=k
xv
u,
ꢀꢀꢀ
(5)
[0102]
其中kq是在不同性能点变化的阀门流量增益,所以有:
[0103][0104]
当考虑伺服阀为零电平系统时:
[0105]
xv=k
ui
u。(7)
[0106]
选择负载位移x
p
、荷载速度和负载压力p
l
作为状态变量,对于电液伺服系统,有由式(2)-(7)电液伺服系统可被重新描述为:
[0107][0108]
其中
[0109]kq
是在不同性能点变化的阀门流量增益。
[0110]
控制目标是为六自由度液压机械手的电液伺服系统(2)构造一种自适应控制方
法,考虑到控制器量化输入和未知外界扰动时,仍然可以保证电液伺服系统的稳定性。
[0111]
在下列步骤中将三阶电液伺服系统(2)推广到以下n维非线性系统。
[0112]
步骤3,建立了如下具有量化输入和未知外界扰动的非线性系统的数学模型,提出一种迟滞量化器来量化输入信号以减少抖动:
[0113][0114]
其中x(t)=[x1(t),...,xn(t)]
t
∈rn为系统的状态, fi:ri×rn
→
r,i=1,2,...,n是未知光滑函数,是已知函数。 y为系统输入,系统只有输入y可测。
[0115]
本发明选择的迟滞量化器为:
[0116][0117]
其中ui=ρ
1-iumin
(i=1,2,
…
),δ=(1-ρ)/(1+ρ),u
min
》0且0《ρ《1。q(u)的死区范围是由参数u
min
决定的,q(u)∈u={0,
±
ui,
±
ui(1+δ),i=1,2,
…
}.参数ρ是量化密度的度量。
[0118]
引理1[8]:对于量化器输出q(u),有函数h(u)和w(t)使得下面等式成立:
[0119]
q(u)=h(u)u+w(t),
[0120]
其中h(u)和w(t)满足:
[0121]
1-δ≤h(u)≤1+δ,|w(t)|≤u
min
。
[0122]
步骤4,设计一个状态观测器来估计不可测的状态,对于未知的外部扰动设计了扰动观测器,提出命令滤波方法避免传统反步法中的“复杂性爆炸”问题。
[0123]
在步骤3中因为是未知光滑的非线性函数,所以在步骤4中需要利用模糊逻辑系统对进行估计,下面对模糊逻辑系统进行简单介绍:
[0124]
系统中的未知非线性项用模糊逻辑系统(flss)描述如下,if-then 规则:
[0125]rl
:如果x1是x2是是则ya为a
l
,l=1,2,...,n其中和a
l
分别是与模糊函数和相关的模糊集,n是模糊规则数.通过单点模糊化、中心加权平均解模糊化、乘积推理,模糊逻辑系统为其中满足
[0126]
定义模糊基函数为令令则模糊逻辑系统可以表示为:
[0127]
引理2[9]:对于任意给定的常数ξ》0,在紧集ω内定义连续函数 f(x),有成立。
[0128]
对式(9)进行坐标变换有
[0129][0130]
其中
[0131]
应用模糊逻辑系统估计未知函数可得
[0132][0133]
其中令式(11) 重新写为:
[0134][0135]
状态观测器设计为:
[0136][0137][0138]
定义由式(12)、(13)可得
[0139][0140]
其中
[0141][0142]
选择向量l,a是一个严格hurwitz矩阵,对于任意给定的正定对称矩阵q=q
t
》0,有正定矩阵p满足等式a
t
p+pa=-2q。
[0143]
在扰动观测器设计之前先引入一个辅助变量:
[0144]
ωi=d
i-kixi,(15)
[0145]
对式(15)求导可得
[0146][0147][0148]
辅助变量ωi的估计为
[0149][0150][0151]
定义则由式(16)、(17)可得
[0152][0153][0154]
扰动观测器设计为
[0155]
选取如下lyapunov函数
[0156][0157]
对式(19)求导得
[0158][0159][0160]
其中
[0161]
由(20)可知,所设计的模糊状态观测器及扰动观测器不能保证观测器误差的收敛性。因此,在下一步骤中,我们将设计一个控制器来保证闭环系统在有限时间稳定的意义下的稳定性。
[0162]
有限时间命令滤波器如下所示:
[0163][0164][0165][0166]
其中αi是输入,l
i,1
和l
i,2
是正常数,x
i+1,c
(t)=ξ
i,1
(t)且是输出。
[0167]
然后,误差补偿信号γi设计为:
[0168][0169][0170][0171]
其中ci,ai,β是待设计的参数。
[0172]
步骤5,自适应控制器的设计与稳定性分析。
[0173]
为了便于控制器的设计,我们需要以下引理及假设:
[0174]
假设1:参考信号yr和它的一阶导数是有界的。
[0175]
假设2:外界扰动di(t)是有界的,且根据复合扰动的定义可知di(t) 也是有界的。
[0176]
假设3:常数μi,i=1,2,...,n,有
[0177][0178]
引理3[9]:定义正数μ,τ,κ和变量e,ι,有如下的不等式成立:
[0179][0180]
引理4[10]:在无输入噪声的情况下,选择合适的参数g1和g2,在有限时间内,下列等式成立:
[0181][0182]
其中α
γ
=α
γ0
,系统的相应解是有限时间稳定的。
[0183]
引理5[10]:当输入噪声满足不等式|α
γ-α
γ0
|≤δ时,有常数ζ1》0,χ1》0,在有限时间内满足下列不等式:
[0184][0185]
其中
△1和
△2是正常数。
[0186]
定义跟踪误差zi为:
[0187]
z1=y-yr[0188][0189]
其中x
i,c
是一阶命令滤波器的输出。
[0190]
定义跟踪误差补偿信号为:
[0191]
mi=z
i-γi,i=1,2,...,n。(24)
[0192]
第1步:对跟踪误差补偿信号m1求导为:
[0193][0194]
选择如下lyapunov函数
[0195][0196]
对式(26)求导得
[0197][0198]
应用young's不等式及可得
[0199][0200][0201]
将(28)、(29)代入(27)得
[0202][0203]
虚拟控制信号α1和自适应律设计为:
[0204][0205][0206]
将(22)、(31)、(32)代入(30)可得
[0207][0208]
其中
[0209]
第i步,对跟踪误差补偿信号mi求导为:
[0210][0211]
选择如下lyapunov函数
[0212][0213]
对式(35)求导得
[0214][0215]
应用young's不等式及可得:
[0216][0217][0218]
将(37)、(38)代入(36)得
[0219][0220]
虚拟控制信号αi和自适应律设计为:
[0221][0222][0223]
将(22)、(40)、(41)代入(39)可得
[0224][0225]
其中
[0226]
第n步,对跟踪误差补偿信号mn求导为:
[0227][0228]
选择如下lyapunov函数
[0229][0230]
对式(43)求导得
[0231][0232]
应用young's不等式及可得:
[0233][0234][0235]
将(45)、(46)代入(44)可得
[0236][0237]
实际控制信号u和自适应律设计为:
[0238][0239][0240]
将(22)、(48)、(49)代入(47)可得
[0241][0242]
其中
[0243]
更进一步,可以得到
[0244][0245]
其中其中
[0246]
接下来,给出了自适应控制器(48)、自适应律(32)、(41)、(49) 和误差补偿信号(22)在未知外界扰动和量化输入的情况下保证系统 (9)的半全局有限时间稳定的定理。
[0247]
定理1:考虑具有未知外界扰动和量化输入的非线性系统(9),在假设1-3和引理1-5将自适应控制器(48)应用于系统(9),则闭环系统是半全局有限时间稳定的。
[0248]
证明:对于误差补偿系统,我们选择以下lyapunov函数:
[0249][0250]
对式(52)求导得
[0251][0252]
根据引理4-5,在有限时间tj内可以得到对于 t≥max{tj}可得:
[0253][0254]
其中
[0255]
选择如下lyapunov函数
[0256]
v=vn+vc。
ꢀꢀꢀ
(55)
[0257]
对式(55)求导得
[0258][0259]
应用young's不等式
[0260][0261]
应用引理3可得
[0262][0263]
将式(57)、(58)代入(56)得
[0264][0265]
根据引理3,令和可得
[0266][0267][0268][0269]
将(60)代入(59)得
[0270][0271]
其中因此有
[0272]
[0273]
其中
[0274]
应用引理3和参考文献[11]中的推论,可得闭环系统中所有的信号在有限时间内都是有界的,m1和γ1可以收敛到:
[0275][0276]
其中0《θ0《1,且设定时间为:
[0277][0278]
鉴于z1=m1+γ1,在有限时间t
*
内有也就是说,跟踪误差和观测器误差可以在有限的时间t
*
内以较小的邻域围绕原点进行调整。
[0279]
步骤6,对步骤2所提出的电液伺服系统进行仿真研究,验证本研究所提出控制方法的有效性。
[0280]
考虑如下电液伺服系统
[0281][0282]
其中
[0283]kq
是在不同性能点变化的阀门流量增益。
[0284]
选取参数a=2.75
×
10-2
(m2),m=200(kg),βe=7.5
×
108(pa),c
t
=8.3
×
10-10
(m5/(s.n)),kq=0.012,f=0.8
×
cos(t+1),yr=0.5
×
sin(t+0.9)-0.3.
[0285]
仿真结果如图3-5所示,图3是在本发明所提出的控制方法下输出y和参考信号yr的轨迹;图4表示状态变量x1及其它的估计的轨迹;图5表示跟踪误差z1的轨迹。由图3-5所得本发明所设计的控制器可保证电液伺服系统是半全局有限时间稳定的。
[0286]
其中本实施例的参考文献(references)包括以下:
[0287]
[1]liul,gaot,liuyj,etal.time-varyingiblfs-basedadaptivecontrolofuncertainnonlinearsystemswithfullstateconstraints.automatica,2021,129:109595.
[0288]
[2]aboutalebianb,talebiha,etedalis,etal.adaptivecontrolofteleoperationsystembasedonnonlineardisturbanceobserver.european
journalofcontrol,2020,53:109-116.
[0289]
[3]sunzy,pengy,wenc,etal.fastfinite-timeadaptivestabilizationofhigh-orderuncertainnonlinearsystemwithanasymmetricoutputconstraint.automatica,2020,121:109170.
[0290]
[4]zhouj,wenc,wangw.adaptivecontrolofuncertainnonlinearsystemswithquantizedinputsignal.automatica,2018,95:152-162.
[0291]
[5]liuw,xief.backstepping-basedadaptivecontrolfornonlinearsystemswithactuatorfailuresanduncertainparameters.circuits,systems,andsignalprocessing,2020,39(1):138-153.
[0292]
[6]liuy,zhangh,wangy,etal.adaptivefuzzycontrolfornonstrict-feedbacksystemsunderasymmetrictime-varyingfullstateconstraintswithoutfeasibilitycondition.ieeetransactionsonfuzzysystems,2020,29(5):976-985.
[0293]
[7]wuh,lius,chengc,etal.observerbasedadaptivedouble-layerfuzzycontrolfornonlinearsystemswithprescribedperformanceandunknowncontroldirection.fuzzysetsandsystems,2020,392:93-114.
[0294]
[8]qix,liuw,yangy,etal.adaptivefinite-timefuzzycontrolfornonlinearsystemswithinputquantizationandunknowntimedelays.journalofthefranklininstitute,2020,357(12):7718-7742.
[0295]
[9]wangf,chenb,liux,etal.finite-timeadaptivefuzzytrackingcontroldesignfornonlinearsystems.ieeetransactionsonfuzzysystems,2017,26(3):1207-1216.
[0296]
[10]levanta.higher-orderslidingmodes,differentiationandoutput-feedbackcontrol.internationaljournalofcontrol,2003,76(9-10):924-941.
[0297]
[11]yuj,ship,zhaol.finite-timecommandfilteredbacksteppingcontrolforaclassofnonlinearsystems.automatica,2018,92:173-180.
[0298]
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1