一种用于汽轮机伺服阀的大电流驱动系统及方法与流程
1.本发明属于伺服控制领域,具体涉及一种用于汽轮机伺服阀的大电流驱动系统及方法。
背景技术:
2.数字电业控制系统(digital electric hydraulic control system,deh)目前普遍采用的是以dcs为基础的系统。dcs是分布式控制系统的英文缩写(distributed control system),又称之为集散控制系统,是相对于集中式控制系统而言的一种新型计算机控制系统。
3.在汽轮机数字电业控制系统(digital electric hydraulic control system,deh)中,伺服设备主要实现对油动机阀门开度的闭环控制。deh控制器生成的油动机阀位指令信号,经过伺服放大模块、电液伺服阀,形成油压调节信号至油动机。油动机行程经位移传感器测出,再反馈至伺服放大模块,使之与该油动机阀位执行保持一致,从而使油动机行程完全由deh的伺服设备进行阀位指令控制。在实际应用中,汽轮机伺服模块所驱动的各类型伺服阀所需的电流为-40ma~40ma,但针对早期电厂采用进口汽轮机设备,需要的伺服驱动电流为0~250ma,驱动电流之间存在差异,不能实现很好的兼容,因此亟需对这一问题进行解决。
技术实现要素:
4.本发明的目的在于针对上述现有技术中的问题,提供一种用于汽轮机伺服阀的大电流驱动系统及方法,能够简单的实现电流放大,配置灵活,可以方便的安装在dcs系统内。
5.为了实现上述目的,本发明有如下的技术方案:一种用于汽轮机伺服阀的大电流驱动系统,包括在汽轮机伺服模块与汽轮机伺服阀之间依次相连的i/v转换电路、信号滤波电路以及v/i转换电路;所述的i/v转换电路用于接收汽轮机伺服模块输出的0~40ma的电流信号,并转换为0~2.5v的电压信号输出给信号滤波电路;所述的信号滤波电路用于对0~2.5v的电压信号的低通截止频率进行调整之后输出给v/i转换电路;所述的v/i转换电路用于接收低通截止频率调整之后的0~2.5v的电压信号,并转换为0~250ma的电流信号输出给汽轮机伺服阀。
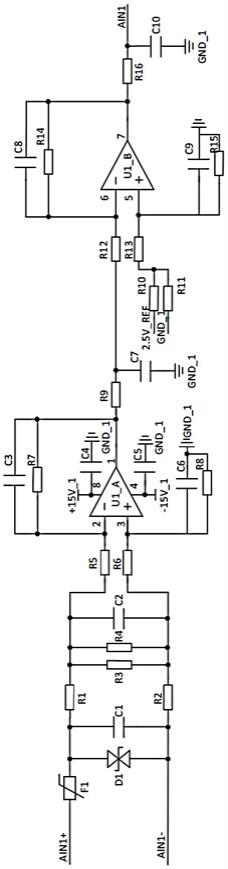
6.作为本发明大电流驱动系统的一种优选方案,所述的i/v转换电路包括第一运算放大器u1,汽轮机伺服模块输出的0~40ma的电流信号连接第一运算放大器u1,其中,电流信号输入正端ain1+经过保险丝f1、电阻r1以及电阻r5连接第一运算放大器u1的第2引脚,第一运算放大器u1的第3引脚经过电阻r6以及电阻r2连接电流信号输入负端ain1-;所述保险丝f1、电阻r1之间的接线与电流信号输入负端ain1-之间并联第一tvs管d1和电容c1,所述电阻r1、r5之间的接线与电阻r6、r2之间的接线上并联电阻r3、电阻r4以及电容c2;第一运
算放大器u1的第4、8引脚连接15v的电源,第一运算放大器u1的第1引脚经过电阻r12连接第一运算放大器u1的第6引脚,第一运算放大器u1的第5引脚经过电阻r13分别连接第一基准电压2.5v_ref和信号地,第一运算放大器u1的第7引脚为i/v转换电路的电压输出信号输出端ain1。
7.作为本发明大电流驱动系统的一种优选方案,所述的信号滤波电路包括设置在第一运算放大器u1第1、2引脚之间的第一rc滤波电路,设置在第一运算放大器u1第1、3引脚之间的第二rc滤波电路,设置在第一运算放大器u1第1引脚与信号地之间的第三rc滤波电路,设置在第一运算放大器u1第6、7引脚之间的第四rc滤波电路,设置在第一运算放大器u1第5引脚与信号地之间的第五rc滤波电路,以及设置在第一运算放大器u1第7引脚与信号地之间的第六rc滤波电路。
8.作为本发明大电流驱动系统的一种优选方案,所述的第一rc滤波电路由电阻r7、电容c3并联组成,所述的第二rc滤波电路由电阻r8、电容c6并联组成,所述的第三rc滤波电路由电阻r9、电容c7串联组成,所述的第四rc滤波电路由电阻r14、电容c8并联组成,所述的第五rc滤波电路由电阻r15、电容c9并联组成,所述的第六rc滤波电路由电阻r16、电容c10串联组成。
9.作为本发明大电流驱动系统的一种优选方案,所述的v/i转换电路包括第二运算放大器u2,i/v转换电路的电压输出信号输出端ain1经过电阻r17与第二运算放大器u2的第3引脚相连,电阻r17的前端连接肖特基二极管d2的第3引脚,肖特基二极管d2的第2引脚与供电电源iso_24v连接,第1引脚与信号地连接,电阻r17的后端经过电容c11与信号地连接,第二运算放大器u2的第2、1引脚之间连接电容c12,且第二运算放大器u2的第2引脚还经过电阻r30与信号地连接;第二运算放大器u2的第4引脚连接信号地;第二运算放大器u2的第8引脚经过磁珠l1连接供电电源iso_24v,且第二运算放大器u2的第8引脚还经过电容c13与信号地连接;第二运算放大器u2的第1引脚经过电阻r18分别连接二极管d3和mos管q1的第1引脚,二极管d3的另一端与信号地连接;mos管q1的第2引脚经过电阻r30与信号地连接;mos管q1的第3引脚连接第二运算放大器u2的第5引脚,第二运算放大器u2的第5引脚还经过电阻r19与供电电源+15v连接;第二运算放大器u2的第6引脚经过相并联的电阻r22、电阻r23与供电电源+15v连接;第二运算放大器u2的第7引脚经过电阻r20连接肖特基二极管d4的第3引脚,肖特基二极管d4的第2引脚与供电电源iso_24v连接,第1引脚与信号地连接;第二运算放大器u2的第6、7引脚之间连接mos管q3,mos管q3的第3引脚连接在电阻r22、电阻r23与运算放大器u2的第6引脚之间,mos管q3的第1、3引脚之间并联电阻r24、电阻r25,mos管q3的第2引脚与电阻r20以及肖特基二极管d4的第3引脚连接,mos管q3的第2引脚还经过电阻r21与信号地连接;mos管q3的第2、1引脚分别与mos管q2的第1、3引脚连接,mos管q2的第2引脚经过保险丝f2与电流输出信号iout1连接,电流输出信号iout1通过接线端子连接至汽轮机伺服阀。
10.作为本发明大电流驱动系统的一种优选方案,mos管q2的第2引脚还经过并联的tvs管d5与电容c14连接信号地。
11.作为本发明大电流驱动系统的一种优选方案,所述的v/i转换电路连接断线检测电路,断线检测电路根据v/i转换电路输出的电流是否超过设定阈值来实时判断0~250ma的电流信号输出是否断线,断线报警信号发送至数字量输入模块回采。
12.作为本发明大电流驱动系统的一种优选方案,所述的断线检测电路包括第三运算放大器u3,v/i转换电路mos管q2的第2引脚与断线检测信号端dx_chk1连接,断线检测信号dx_chk1经过电阻r23连接电阻r24的一端以及第三运算放大器u3的第3引脚,电阻r24的另一端连接信号地;第三运算放大器u3的第2、1引脚连接,第8引脚连接供电电源iso_24v,第4引脚连接信号地;第三运算放大器u3的第8引脚还通过电容c15与信号地连接;第三运算放大器u3的第1引脚经过稳压管d6与光耦继电器u4的第1引脚连接,光耦继电器u4的第2、3引脚相连,第4引脚经过电阻r25连接信号地;光耦继电器u4的第5引脚与led断线信号指示灯led_y连接,并经过电阻r26与供电电源+5v_1连接;光耦继电器u4的第6引脚与信号地连接;光耦继电器u4的第7引脚与断线开关指示信号负端do1-连接,并经过tvs管d7与光耦继电器u4的第8引脚连接,tvs管d7还经过保险丝f3与断线开关指示信号正端do1+连接。
13.本发明还提供一种用于汽轮机伺服阀的大电流驱动方法,包括以下步骤:将汽轮机伺服模块输出的0~40ma的电流信号转换为0~2.5v的电压信号;将0~2.5v的电压信号的低通截止频率进行调整;将低通截止频率进行调整之后的0~2.5v的电压信号转换为0~250ma的电流信号;通过0~250ma的电流信号给汽轮机伺服阀进行供电。
14.作为本发明驱动方法的一种优选方案,以转换为0~250ma的电流信号为检测对象进行断线检测,当实时电流超过阈值即判定电流输出断线。
15.相较于现有技术,本发明具有如下的有益效果:本发明能实现将0~40ma的电流信号放大为0~250ma,常规用于汽轮机伺服阀的驱动电流为-40ma~40ma,为提供汽轮机伺服阀需要的驱动电流为0~250ma,现有产品无类似大电流伺服控制模块。本发明在使用现有的伺服控制器基础上提供0~40ma的伺服电流,通过i/v转换电路、信号滤波电路以及v/i转换电路实现将0~40ma的伺服电流放大至0~250ma。本发明能够方便的安装在dcs系统内,只需简单外部端子接线即可实现电流放大,实现新老汽轮机设备的兼容。
16.进一步的,本发明设置了断线检测电路,断线检测电路根据v/i转换电路输出电流是否超过设定阈值来实时判断0~250ma的电流信号输出是否断线,可支持1ma输出的断线报警,当输出断线时,可以同时通过指示灯和输出空节点信号产生报警指示。
附图说明
17.图1 本发明大电流驱动系统的实现原理框图;图2 本发明大电流驱动系统的电路结构框图;图3 本发明i/v转换电路的电路接线图;图4 本发明v/i转换电路的电路接线图;图5 本发明断线检测电路的电路接线图。
具体实施方式
18.下面结合附图及实施例对本发明做进一步的详细说明。
19.参见图1,图2,本发明提出的一种用于汽轮机伺服阀的大电流驱动系统,包括依次相连的i/v转换电路、信号滤波电路以及v/i转换电路。i/v转换电路与汽轮机伺服模块相连,用于接收汽轮机伺服模块输出的0~40ma的电流信号并转换为0~2.5v的电压信号,信号
滤波电路用于对接收到的电压信号的低通截止频率进行调整,再通过v/i转换电路输出0~250ma的电流信号,v/i转换电路与汽轮机伺服阀连接。本发明还在v/i转换电路上连接设置了断线检测电路,该断线检测电路根据v/i转换电路输出的电流是否超过设定阈值来实时判断0~250ma的电流信号输出是否断线,断线报警信号发送至数字量输入模块回采。
20.参见图3,一种实施例中,i/v转换电路包括第一运算放大器u1,汽轮机伺服模块输出的0~40ma的电流信号连接第一运算放大器u1,其中,电流信号输入正端ain1+经过保险丝f1、电阻r1以及电阻r5连接第一运算放大器u1的第2引脚,第一运算放大器u1的第3引脚经过电阻r6以及电阻r2连接电流信号输入负端ain1-;所述保险丝f1、电阻r1之间的接线与电流信号输入负端ain1-之间并联第一tvs管d1和电容c1,所述电阻r1、r5之间的接线与电阻r6、r2之间的接线上并联电阻r3、电阻r4以及电容c2;第一运算放大器u1的第4、8引脚连接15v的电源,第一运算放大器u1的第1引脚经过电阻r12连接第一运算放大器u1的第6引脚,第一运算放大器u1的第5引脚经过电阻r13分别连接第一基准电压2.5v_ref和信号地,第一基准电压2.5v_ref和电阻r13之间连接电阻r10,信号地和电阻r13之间连接电阻r11,其中第一基准电压2.5v_ref与电阻r10作为调试量程使用,在实际应用中,不焊接电阻r10。第一运算放大器u1的第7引脚为i/v转换电路的电压输出信号输出端ain1,此端连接至v/i转换电路。
21.参见图3,在本发明的大电流驱动系统当中,信号滤波电路包括设置在第一运算放大器u1第1、2引脚之间的第一rc滤波电路,第一rc滤波电路由电阻r7、电容c3并联组成;以及设置在第一运算放大器u1第1、3引脚之间的第二rc滤波电路,第二rc滤波电路由电阻r8、电容c6并联组成;以及设置在第一运算放大器u1第1引脚与信号地之间的第三rc滤波电路,第三rc滤波电路由电阻r9、电容c7串联组成;以及设置在第一运算放大器u1第6、7引脚之间的第四rc滤波电路,第四rc滤波电路由电阻r14、电容c8并联组成;以及设置在第一运算放大器u1第5引脚与信号地之间的第五rc滤波电路,第五rc滤波电路由电阻r15、电容c9并联组成;以及设置在第一运算放大器u1第7引脚与信号地之间的第六rc滤波电路,第六rc滤波电路由电阻r16、电容c10串联组成。
22.参见图4,一种实施例中,本发明大电流驱动系统的v/i转换电路包括第二运算放大器u2,将上述i/v转换电路的电压输出信号输出端ain1经过电阻r17与第二运算放大器u2的第3引脚相连,电阻r17的前端连接肖特基二极管d2的第3引脚,肖特基二极管d2的第2引脚与供电电源iso_24v连接,第1引脚与信号地连接,电阻r17的后端经过电容c11与信号地连接,第二运算放大器u2的第2、1引脚之间连接电容c12,且第二运算放大器u2的第2引脚还经过电阻r30与信号地连接;第二运算放大器u2的第4引脚连接信号地;第二运算放大器u2的第8引脚经过磁珠l1连接供电电源iso_24v,且第二运算放大器u2的第8引脚还经过电容c13与信号地连接;第二运算放大器u2的第1引脚经过电阻r18分别连接二极管d3和mos管q1的第1引脚,二极管d3的另一端与信号地连接;mos管q1的第2引脚经过电阻r30与信号地连接;mos管q1的第3引脚连接第二运算放大器u2的第5引脚,第二运算放大器u2的第5引脚还经过电阻r19与供电电源+15v连接;第二运算放大器u2的第6引脚经过相并联的电阻r22、电阻r23与供电电源+15v连接;第二运算放大器u2的第7引脚经过电阻r20连接肖特基二极管d4的第3引脚,肖特基二极管d4的第2引脚与供电电源iso_24v连接,第1引脚与信号地连接;第二运算放大器u2的第6、7引脚之间连接mos管q3,mos管q3的第3引脚连接在电阻r22、电阻
r23与运算放大器u2的第6引脚之间,mos管q3的第1、3引脚之间并联电阻r24、电阻r25,mos管q3的第2引脚与电阻r20以及肖特基二极管d4的第3引脚连接,mos管q3的第2引脚还经过电阻r21与信号地连接;mos管q3的第2、1引脚分别与mos管q2的第1、3引脚连接,mos管q2的第2引脚与断线检测信号端dx_chk1连接;mos管q2的第2引脚还经过保险丝f2与电流输出信号iout1连接,同时经过并联的tvs管d5与电容c14连接信号地;电流输出信号iout1通过接线端子连接至设备。
23.参见图5,一种实施例中,本发明大电流驱动系统的断线检测电路包括第三运算放大器u3,断线检测信号dx_chk1经过电阻r23连接电阻r24的一端以及第三运算放大器u3的第3引脚,电阻r24的另一端连接信号地;第三运算放大器u3的第2、1引脚连接,第8引脚连接供电电源iso_24v,第4引脚连接信号地;第三运算放大器u3的第8引脚还通过电容c15与信号地连接;第三运算放大器u3的第1引脚经过稳压管d6与光耦继电器u4的第1引脚连接,光耦继电器u4的第2、3引脚相连,第4引脚经过电阻r25连接信号地;光耦继电器u4的第5引脚与led断线信号指示灯led_y连接,并经过电阻r26与供电电源+5v_1连接;光耦继电器u4的第6引脚与信号地连接;光耦继电器u4的第7引脚与断线开关指示信号负端do1-连接,并经过tvs管d7与光耦继电器u4的第8引脚连接,tvs管d7还经过保险丝f3与断线开关指示信号正端do1+连接。
24.一种用于汽轮机伺服阀的大电流驱动方法,包括以下步骤:将汽轮机伺服模块输出的0~40ma的电流信号转换为0~2.5v的电压信号;将0~2.5v的电压信号的低通截止频率进行调整;将低通截止频率进行调整之后的0~2.5v的电压信号转换为0~250ma的电流信号;通过0~250ma的电流信号给汽轮机伺服阀进行供电。
25.本发明用于汽轮机伺服阀的大电流驱动方法还以转换为0~250ma的电流信号为检测对象进行断线检测,当实时电流超过阈值即判定电流输出断线。
26.以上所述的仅仅是本发明的较佳实施例,并不用以对本发明的技术方案进行任何限制,本领域技术人员应当理解的是,在不脱离本发明精神和原则的前提下,该技术方案还可以进行若干简单的修改和替换,这些修改和替换也均属于权利要求书所涵盖的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1