适用于大规模无人机的网格化编队方法
1.本发明涉及一种网格化编队方法,尤其是一种适用于大规模无人机的网格化编队方法。
背景技术:
2.在现在战争中,无人机集群作战是一大发展趋势。无人机的通讯方式主要依赖电磁波无线通讯,无线通讯易受到电磁干扰,电磁对抗已经成为战争中常态化,复杂的电磁环境是战场电磁环境复杂化在时域、空域、频域和能量域上的集中表现形式。
3.无人机集群编队在复杂电磁环境中势必受到很大干扰,除此之外,还有战场上火力打击等情况都可能瓦解大规模无人机编队。为了避免在电磁干扰和火力打击下大规模无人机编队易被瓦解的问题,保证无人机编队的稳定性,故研究在复杂电磁环境以及火力打击下对无人机集群编队的课题具有重要的意义。
技术实现要素:
4.本发明的目的是克服现有技术中存在的不足,提供一种适用于大规模无人机的网格化编队方法,其基于九宫格协议和链式视觉参考法则编队,能有效避免在电磁干扰下以及火力打击下大规模无人机编队的瓦解,确保无人机编队的稳定性与可靠性。
5.按照本发明提供的技术方案,所述适用于大规模无人机的网格化编队方法,所述网格化编队方法包括如下步骤:
6.步骤1、根据非编队区域内无人机的数量确定网格化编队的规模,根据网格化编队规模能确定所述网格化编队内的九宫格数量;
7.步骤2、非编队区域内所需的无人机依次进入编队区域,以构建基础九宫格网格编队,其中,基础九宫格网格编队内所有无人机的拓扑网格编号满足九宫格协议,基础九宫格网格编队内所有无人机均处于同一飞行高度,基础九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致;
8.步骤3、非编队区域内的无人机进入编队区域,以构建嵌套九宫格网格编队,所述嵌套九宫格网格编队内至少嵌套一个基础九宫格网格编队内的拓扑网格编号,其中,嵌套九宫格网格编队内所有无人机的拓扑网格编号满足九宫格协议,嵌套九宫格网格编队内所有无人机均处于同一飞行高度,嵌套九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致;
9.步骤4、非编队区域内的无人机进入编队区域,再次构建嵌套九宫格网格编队,所述再次构建的嵌套九宫格网格编队内至少嵌套一个嵌套九宫格网格编队内的拓扑网格编号和/或至少嵌套一个基础九宫格网格编队内的拓扑网格编号,其中,所构建的嵌套九宫格网格编队内所有无人机的拓扑网格编号满足九宫格协议,所构建的嵌套九宫格网格编队内所有无人机均处于同一飞行高度,所构建的嵌套九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致;
10.步骤5、重复上述步骤3或步骤4,直至非编队区域内的无人机均进入编队区域内,以能得到所需的网格化编队。
11.得到的网格化编队呈方队状排布。
12.对任一无人机,在无人机上均设置编队视觉系统、测距传感系统以及合作目标灯系统,其中,一无人机进入编队区域后,通过编队视觉系统能获取所述编队视觉系统的视觉范围内邻近无人机相应的编队飞行位姿状态;通过测距传感系统能确定与邻近无人机间的距离,通过合作目标灯系统能显示输出当前无人机所在九宫格网格编队的拓扑网格编号;
13.所述编队飞行位姿状态包括邻近无人机的合作目标灯系统显示的拓扑网格编号以及所述邻近无人机的飞行位置。
14.所述编队视觉系统包括若干编队视觉传感器,所述编队视觉系统内的编队视觉传感器至少分布于所在无人机的机身左侧、机身右侧、机头部以及机尾部;
15.所述测距传感系统包括若干测距传感器,所述测距传感系统内的测距传感器至少分布于所在无人机的机身左侧、机身右侧、机头部以及机尾部;
16.所述合作目标灯系统包括若干机身合作目标灯,合作目标灯系统内的机身合作目标灯至少分布于所在无人机的左机翼、右机翼、机头部以及机尾部。
17.对任一位于网格化编队内的无人机,根据九宫格协议确定所述无人机的参考无人机组,当参考无人机组内不存在参考无人机时,当前的无人机脱离网格化编队。
18.根据非编队区域内无人机的数量确定九宫格数量的关系为:
[0019][0020]
其中,m为非编队区域内无人机的数量,n5为网格编队内九宫格单元的数量。
[0021]
本发明的优点:非编队区域内的无人机进入编队区域后,能依次构建基础九宫格网格编队、嵌套九宫格网格编队,并在基础九宫格网格编队以及嵌套九宫格网格编队基础上最终得到所需的网格化编队,网格化编队内所有无人机处于同一飞行高度以及在同一飞行速度下飞行;在得到网格化编队后,对于任意拓扑网格编码的无人机,均能确定参考无人机组,从而在达到飞行终点前均能根据参考无人机组内的参考无人机在网格化编队约束下飞行,即能够实现在强电磁干扰以及在编队飞行过程中机群失去部分飞机的情况下,有效实现无人机编队飞行,有效避免战场上强电磁干扰对无人机编队造成的影响。
附图说明
[0022]
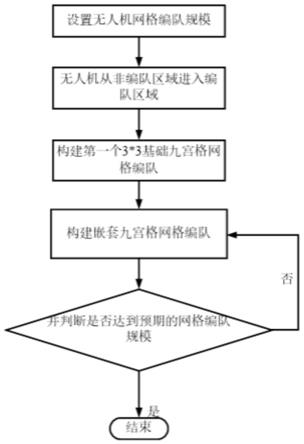
图1为本发明的流程图。
[0023]
图2为本发明无人机的示意图。
[0024]
图3为本发明基础九宫格网络编队的示意图。
[0025]
图4为本发明构建的基础九宫格网络编队的视觉参考拓扑示意图。
[0026]
图5为本发明利用基础九宫格网格编队构建嵌套九宫格网格编队的拓扑示意图。
[0027]
图6为在图5的基础上再次构建嵌套九宫格网格编队的拓扑示意图。
[0028]
图7为本发明形成7*7网格化编队时的示意图。
[0029]
图8为图9中网格化编队的拓扑示意图。
[0030]
图9为本发明选定7*7网格化编队中一无人机的示意图。
[0031]
图10为图9中所选定无人机的参考无人机组的示意图。
[0032]
附图标记说明:100
‑
右机翼的机身合作目标灯、110
‑
左机翼的机身合作目标灯、120
‑
机头部的机身合作目标灯、130
‑
机尾部的机身合作目标灯以及140
‑
无人机机身。
具体实施方式
[0033]
下面结合具体附图和实施例对本发明作进一步说明。
[0034]
如图1所示:为了能有效避免在电磁干扰下以及火力打击下大规模无人机编队的瓦解,确保无人机编队的稳定性与可靠性,本发明的种适用于大规模无人机的网格化编队方法,具体地,所述网格化编队方法包括如下步骤:
[0035]
步骤1、根据非编队区域内无人机的数量确定网格化编队的规模,根据网格化编队规模能确定所述网格化编队内的九宫格数量;
[0036]
具体地,在编队前,所有待编队的无人机均处于非编队区域,非编队区域、编队区域具体可以根据实际情况选择确定,具体为本技术领域人员所熟知,此处不再赘述。非编队区域的无人机数量根据实际需要选择,非编队区内无人机数量确定后即能确定无人机编队的规模,无人机编队规模具体可以根据实际需要选择,非编队区域的无人机需要均进入编队区域进行编队。在非编队区域内时,无人机可以自由飞行,一般地,当无人机从非编队区域进入编队区域后,各架无人机在达到飞行终点前,各自有自主规划的航线;也即:每架无人机有自己的航线,每架无人机有相同的起始点和终点,但是所有的无人机的航线受到网格编队的约束。
[0037]
本发明实施例中,在采用基于九宫格协议的网格化编队时,对非编队区域内无人机的数量与网格化编队后九宫格数量具有对应关系,具体地,根据非编队区域内无人机的数量确定九宫格数量的关系为:
[0038][0039]
其中,m为非编队区域内无人机的数量,n5为网格编队内九宫格单元的数量。
[0040]
具体实施时,对任一无人机,在无人机上均设置编队视觉系统、测距传感系统以及合作目标灯系统,其中,一无人机进入编队区域后,通过编队视觉系统能获取所述编队视觉系统的视觉范围内邻近无人机相应的编队飞行位姿状态;通过测距传感系统能确定与邻近无人机间的距离,通过合作目标灯系统能显示输出当前无人机所在九宫格网格编队的拓扑网格编号;
[0041]
所述编队飞行位姿状态包括邻近无人机的合作目标灯系统显示的拓扑网格编号以及所述邻近无人机的飞行位置。
[0042]
本发明实施例中,所述编队视觉系统包括若干编队视觉传感器,所述编队视觉系统内的编队视觉传感器至少分布于所在无人机的机身左侧、机身右侧、机头部以及机尾部。其中,编队视觉传感器可以采用常用的摄像头等图像采样设备,具体类型可以根据实际需要选择,此处不再赘述。编队视觉传感器一般分布于无人机的机身左侧、机身右侧、机头部以及机尾部,从而利用一无人机上的视觉编队系统能有效获取视觉范围内邻近无人机的编队飞行状态。
[0043]
所述测距传感系统包括若干测距传感器,所述测距传感系统内的测距传感器至少
分布于所在无人机的机身左侧、机身右侧、机头部以及机尾部;其中,测距传感器可以采用现有常用的类型,此处不再赘述。测距传感系统内的测距传感器至少分布于所在无人机的机身左侧、机身右侧、机头部以及机尾部,以便利用测距传感器系统能获取邻近无人机之间的距离。
[0044]
进一步地,所述合作目标灯系统包括若干机身合作目标灯,合作目标灯系统内的机身合作目标灯至少分布于所在无人机的左机翼、右机翼、机头部以及机尾部。
[0045]
图2中,示出了合作目标灯系统内的机身目标灯在无人机机身140上的分布情况;其中,包括右机翼的机身合作目标灯100、左机翼的机身合作目标灯110、机头部的机身合作目标120以及机尾部的机身合作目标灯130。具体实施时,右机翼的机身合作目标灯100可以采用绿色led灯,左机翼的机身合作目标灯110可以采用紫色led灯,机头部的机身合作目标120可以采用红色led灯,机尾部的机身合作目标灯130可以采用蓝色led灯,机身合作目标灯的具体分布以及色彩等等还可以根据需要选择,以能满足被其他无人机上的编队视觉系统所获取当前无人机的编队飞行位姿状态为准,此处不再赘述。
[0046]
在具体实施时,通过合作目标灯系统能显示输出当前无人机所在九宫格网格编队的拓扑网格编号时,拓扑网格编号为1~9共9个数字,具体显示时,可采用点亮与拓扑网格编号数字相一致的高亮led合作目标灯数量予以表示当前无人机的所在拓扑网格编号,具体可以根据需要选择,此处不再赘述。采用与拓扑网格编号相一致的数量显示方式时,如拓扑网格编号为2,则右机翼的机身合作目标灯100、左机翼的机身合作目标灯110、机头部的机身合作目标120以及机尾部的机身合作目标灯130内均有两个合作目标灯处于点亮状态。
[0047]
步骤2、非编队区域内所需的无人机依次进入编队区域,以构建基础九宫格网格编队,其中,基础九宫格网格编队内所有无人机的拓扑网格编号满足九宫格协议,基础九宫格网格编队内所有无人机均处于同一飞行高度,基础九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致;
[0048]
具体地,在编队开始后,可以采用本技术领域常用的技术手段将非编队区域内的无人机引导进入编队区域,具体引导方式可以根据实际需要选择,此处不再赘述。在编队时,首先需要在编队区域内构建一个基础九宫格网格编队,为了能得到九宫格的网格编队,依次进入编队区域的无人机为九架,即九宫格网格编队为3*3的网格编队。
[0049]
图3中为在编队区域内形成3*3的基础九宫格网络编队时的排布示意图,图4中为图3中基础九宫格网格编队的视觉参考拓扑示意图。基础九宫格网格编队内所有无人机均具有一拓扑网格编号,所述拓扑网格编号为1至9共9个数字。当要满足九宫格协议时,则需要将中间位置无人机的拓扑网格编号设置为5,且任一九宫格网格编队中,中间无人机的拓扑网格编号均需设置为5。
[0050]
对于九宫格协议,由图4可知,横向的拓扑为8
‑1‑
6、3
‑5‑
7、4
‑9‑
2,纵向的拓扑为8
‑3‑
4、1
‑5‑
9、6
‑7‑
2;斜向的拓扑为8
‑5‑
2、4
‑5‑
6;满足九宫格协议,具体是指每一个横向拓扑、每一个纵向拓扑以及任一斜向拓扑的拓扑网格编号累加和均为15,具体与现有九宫格的情况相一致,为本技术领域人员所熟知,此处不再赘述。
[0051]
具体实施时,基础九宫格网格编队内所有无人机均处于同一飞行高度,基础九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致。由图4中的拓扑可知,处于拓扑网格编号为1位置的无人机与处于拓扑网格编号为8位置的无人机之间的距离,与
处于拓扑网络编号为1的无人机与处于拓扑网络编号为6的无人机之间的距离相同,也与处于拓扑网络编号为1的无人机与处于拓扑网络编号为5的无人机之间的距离相同,即图4中,8
‑
1之间的距离与1
‑
6之间的距离以及1
‑
5之间的距离相等。具体实施时,相邻无人机之间的距离可以根据实际需要选择,此处不再赘述。无人机飞行的高度、飞行的速度以及相邻两架无人机之间的距离可以根据网格编队需要,预先配置,具体为本技术领域人员所熟知,此处不再赘述。
[0052]
其余无人机之间的距离可以参考上述说明,此处不再赘述。具体实施时,处于拓扑网格编号为1位置的无人机与处于拓扑网格编号为8位置的无人机之间的距离,可以由处于拓扑网格编号为1位置无人机利用测距传感系统确定得到,其余类同,为本技术领域人员所熟知,此处不再赘述。
[0053]
为了能形成图3所示的基础九宫格网格编队,下面通过一个具体的实施情况进行说明。具体地,第一架无人机进入编队区域,且所述第一架无人机通过自身的合作目标灯系统显示输出拓扑网格编号为5;然后,第二架无人机进入编队区域,第二架无人机的飞行速度以及飞行高度与第一架无人机相一致,第二架无人机通过其上的编队视觉系统确定第一架无人机的编队飞行位姿状态,根据确定第一架无人机的编队飞行姿态确定在基础九宫格网络编队的位置,如可以为拓扑网格编号为1的位置(此时,第二架无人机处于第一架无人机的正前方),当然,也可以为其他位置,根据实际需要选择,此处不再赘述。第二架无人机进入所在基础九宫格网格编队内的位置后,通过合作目标灯系统能显示输出所在拓扑网格编号为1的位置状态,当为其他位置时,通过合作目标灯系统进行相应的显示,此处不再赘述。
[0054]
第三架无人机进入编队区域后,第三架无人机利用其上的编队视觉系统确定第一架无人机以及第二架无人机相应的编队飞行位姿状态,如能确定拓扑网格编号为5的位置存在无人机且拓扑网格编号为1的位置也存在无人机,第三架无人机根据实际需要进入所需的位置,如可以进入拓扑网格编号为2的位置,且在进入位置后,通过第三架无人机的合作目标灯系统能显示输出所在拓扑网格编号为2的位置状态,当为其他位置时,通过合作目标灯系统进行相应的显示,此处不再赘述。
[0055]
当然,在第三架无人机、第二架无人机均需要与第一架无人机保持相同的飞行高度以及飞行速度。此外,当其余的第四架无人机至第九架无人机进入并构建基础九宫格网格编队时,具体可以参考上述第二架无人机以及第三架无人机的具体说明,只需要保证相邻拓扑网格编号位置的无人机之间具有相等的距离即可,此处不再赘述。一般地,在所有无人机内均可以预先存储相应编队规模的九宫格编队拓扑图,利用九宫格网格编队的拓扑图能确定自己和其他无人机在九宫格网格编队内的关系。
[0056]
步骤3、非编队区域内的无人机进入编队区域,以构建嵌套九宫格网格编队,所述嵌套九宫格网格编队内至少嵌套一个基础九宫格网格编队内的拓扑网格编号,其中,嵌套九宫格网格编队内所有无人机的拓扑网格编号满足九宫格协议,嵌套九宫格网格编队内所有无人机均处于同一飞行高度,嵌套九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致;
[0057]
具体地,在构建基础九宫格网格编队后,非编队区域内的无人机需要依次进行编队区域,进入编队区域的无人机在编队时,需要基于基础九宫格网格编队,即构建嵌套的九
宫格网格编队需要至少利用基础九宫格网格编队内的至少一个拓扑网格,也即至少利用基础九宫格网格编队内的至少一个无人机,具体嵌套情况与所嵌套的位置相关,下面进行具体说明。
[0058]
构建的嵌套九宫格网格编队需要利用基础九宫格网格编队内至少一个拓扑网格编号,如图5所示,为利用基础九宫格网格编队内拓扑网格编号为4的拓扑网格。此时,对于构建的嵌套九宫格网格编队,相当于预先设定了一无人机的位置。当构建嵌套九宫格网格编队的第一架无人机进入后,需要利用其上的编队视觉系统基础九宫格网格编队内拓扑网格编号为4位置无人机的编队飞行姿态状态,并根据上述相邻无人机之间的距离等关系,能确定进入所要构建嵌套九宫格网格编队内的位置,然后通过其合作目标灯系统能显示输出所在拓扑网格编号的位置状态,具体与上述相一致,可以参考上述说明,此处不再赘述。
[0059]
具体实施时,构建嵌套九宫格网格编队时,具体构建过程可以参考上述基础九宫格网格编队的说明,构建中需要满足九宫格协议,且要保持无人机具有相同的飞行速度以及相邻无人机间的距离相同,图5中的左下角即为构建后的嵌套九宫格网格编队。
[0060]
步骤4、非编队区域内的无人机进入编队区域,再次构建嵌套九宫格网格编队,所述再次构建的嵌套九宫格网格编队内至少嵌套一个嵌套九宫格网格编队内的拓扑网格编号和/或至少嵌套一个基础九宫格网格编队内的拓扑网格编号,其中,所构建的嵌套九宫格网格编队内所有无人机的拓扑网格编号满足九宫格协议,所构建的嵌套九宫格网格编队内所有无人机均处于同一飞行高度,所构建的嵌套九宫格网格编队内横向上以及纵向上任意相邻的两架无人机距离相一致;
[0061]
具体地,对于大规模的无人机编队,一般地,在构建基础九宫格网格编队以及第一次构建的嵌套九宫格网格编队后,非编队区域内的无人机会依然存在,因此,需要继续构建嵌套九宫格网格编队。再次构建嵌套九宫格网格编队时,构建的嵌套九宫格网格编队内至少嵌套一个嵌套九宫格网格编队内的拓扑网格编号和/或至少嵌套一个基础九宫格网格编队内的拓扑网格编号,具体地,所述至少嵌套一个嵌套九宫格网格编队内的拓扑网格编号和/或基础九宫格网格编队内的拓扑网格编号的实际情况,与所构建嵌套九宫格网格编队的位置相关,具体构建过程可以参考上述步骤2以及步骤3的说明,此处不再赘述。
[0062]
图6中示出了在图5的基础上再次构建嵌套九宫格网格编队的情况,图6中构建嵌套九宫格网格编队,利用基础九宫格网格编队内拓扑网格编号为4
‑9‑
2的拓扑网格,同时,还利用图5中构建嵌套九宫格网格编队内的拓扑网格编号为3
‑
8的拓扑网格。此时,对图6中构建嵌套九宫格网格编队,即预先确定了拓扑网格编号为4
‑9‑2‑3‑
8相应无人机的位置,从非编队区有进入的无人机,只需要完成5
‑7‑1‑
6相应拓扑网格编号位置的编队即可,具体可以参考上述说明,此处不再赘述。
[0063]
步骤5、重复上述步骤3或步骤4,直至非编队区域内的无人机均进入编队区域内,以能得到所需的网格化编队。
[0064]
具体地,步骤4后,当存在无人机从非编队区域进入编队区域时,根据基础九宫格网格编队内拓扑网格编号被嵌套的情况,可以选择步骤3或步骤4的形式进行所需构建的嵌套九宫格网格编队,具体情况可以参考上述说明,此处不再赘述。
[0065]
由上述说明可知,本发明在网格化编队时,需要将非编队区域内的无人机全部进入编队区域,根据上述构建九宫格网格编队具体情况,能最终得到网格化编队。具体实施
时,得到的网格化编队呈方队状排布,即将网格化编队优先选择呈方队排布,如呈7*7的网格方队排布,图7、图8和图9示出了7*7网格方队排布的情况,所形成的多个九宫格连环嵌套结构能使无人机编队联系更加紧密,进而增加整个编队的稳定性。图7、图8和图9中,由于每个九宫格编队内均需要包含一个拓扑网格编号为5的拓扑网格,因此,7*7网格方队内的九宫格数量n5为9个。
[0066]
因此,上述公式(1)中,对网格编队内九宫格单元的数量n5,即上述步骤构建的基础九宫格网格编队以及所有构建嵌套九宫格网格编队的数量之和。
[0067]
进一步地,对任一位于网格化编队内的无人机,根据九宫格协议确定所述无人机的参考无人机组,当参考无人机组内不存在参考无人机时,当前的无人机脱离网格化编队。
[0068]
具体地,对于参考无人机组内的参考无人机,具体选取主要包括如下两个条件:1)、参考无人机所在的拓扑网格与当前无人机的拓扑网格处于拓扑图中的一条直线上。2)、在参考方向上,除自身拓扑网格编号和临近参考无人机的拓扑网格编号外,还需要在该参考方向上再找出一个拓扑网格,这三个拓扑网格编号相应的数字之和必须为15。即满足以上两个条件的无人机则为可参考的无人机。
[0069]
一般地,在无人机内具有方向位显示仪表,如图10所示,图10中示出了无人机的仪表能显示8个方向位所可以参考参考无人机的情况。如图4所示,对于构建的基础九宫格网格编队,处于拓扑网格编号为8位置的无人机在方向位2上只会参考拓扑网格编号为1位置的无人机、拓扑网格编号为6位置的无人机,在方向位3上会参考拓扑网格编号为5位置的无人机和拓扑网格编号为2位置的无人机,在方向位4上会参考拓扑网格编号为3位置的无人机和拓扑网格编号为4位置的无人机。所述方向位2、方向位3以及方向位4上所有无人机所在的拓扑网格编号与拓扑网格编号8组成的三个拓扑网格编号之和为15,满足九宫格协议,故处于拓扑网格编号为8位置的无人机能参考的无人机所处为拓扑网格编码为1、6、5、2、3、4。
[0070]
同理,拓扑网格编号为3位置的无人机能参考的无人机所处的拓扑网格编码为8、4、5、7。其他拓扑网格编号的无人机所能参考的无人机均以此为准则,具体可以依照上述说明确定得到。具体实施时,在图4的拓扑图中,不同拓扑网格编队位置处的无人机所参考的无人机数量有差异,例如,拓扑网格编码为2、4、6、8的无人机分别有6架无人机可以参考,拓扑网格编码为5处无人机可有8架可以参考,拓扑网格编码为1、3、7、9处的无人机分别有4架无人机可以参考。
[0071]
如图9所示,在7*7规模的网格化编队拓扑图中,黑色虚线框中拓扑网格编码为4处的无人机,可以看出在该规模编队下,拓扑网格编码为4处无人机所能参考的无人机除方向位1上的拓扑网格编码为5的无人机、方向位2上的拓扑网格编码为9的无人机、方向位3上拓扑网格编码为5的无人机、方向位4上的拓扑网格编码为3的无人机、方向位5上的拓扑网格编码为5的无人机、方向位6上的拓扑网格编码为9的无人机、方向位7上的拓扑网格编码为5的无人机、方向位8上的拓扑网格编码为3的无人机以外,还有方向位1上延申一个拓扑网格编码为6的无人机、方向位2上延申一个拓扑网格编码为2的无人机、方向位3上延申一个拓扑网格编码为6的无人机、方向位4上延申一个拓扑网格编码为8的无人机、方向位5上延申一个拓扑网格编码为6的无人机、方向位6上延申一个拓扑网格编码为2的无人机、方向位7上延申一个拓扑网格编码为6的无人机、方向位8上延申一个拓扑网格编码为5的无人机,总
共满足参考条件的无人机数目达16架,如图10所示,若这16架无人机被摧毁则,则处于黑色虚线框中拓扑网格编码为4处的无人机脱离编队,否则,黑色虚线框中拓扑网格编码为4处的无人机可以根据任一参考无人机在网格化编队约束下飞行,直至到达飞行终点;即可以保持编队飞行状态。
[0072]
综上,本发明非编队区域内的无人机进入编队区域后,能依次构建基础九宫格网格编队、嵌套九宫格网格编队,并在基础九宫格网格编队以及嵌套九宫格网格编队基础上最终得到所需的网格化编队,网格化编队内所有无人机处于同一飞行高度以及在同一飞行速度下飞行;在得到网格化编队后,对于任意拓扑网格编码的无人机,均能确定参考无人机组,从而在达到飞行终点前均能根据参考无人机组内的参考无人机在网格化编队约束下飞行,即能够实现在强电磁干扰以及在编队飞行过程中机群失去部分飞机的情况下,有效实现无人机编队飞行,有效避免战场上强电磁干扰对无人机编队造成的影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1