一种能够实时监测环境的物联网系统的制作方法
1.本发明涉及环境监测技术领域,具体为一种能够实时监测环境的物联网系统。
背景技术:
2.随着我国现代化进程的不断发展和人民生活水平的不断提高,污染源的种类日益增多,特别是化工区、工业集中区及周边环境,污染方式与生态破坏类型日趋复杂,环境污染负荷逐渐增加,现有技术中,有的环境监测方式,主要是以人力方式将复数个感测装置设置在欲监控的环境,而在预定监测的时间到达时,再由人力方式到设置复数个感测装置的监控环境处,将各个感测装置所量测到的数据取回,最后再将所有感测装置所量测到的数据数据汇整分析,以达到环境监测的效果,为了能够全面的监测环境数据,需要设置多个温湿度传感器等环境监测器件,采集不同位置的环境数据,需要较多的环境监测器件才能够实现,而且需要对众多传感器经常的进行检修,导致工作人员劳动量较大,不能满足目前的环境监测需要。
技术实现要素:
3.本发明的目的在于提供一种能够实时监测环境的物联网系统,以解决上述背景技术中提出的采集不同位置的环境数据,需要较多的环境监测器件才能够实现,监测不方便无法提供实时的现场环境数据的问题。
4.为实现上述目的,本发明提供如下技术方案:一种能够实时监测环境的物联网系统,包括;
5.检测平台;
6.若干个检测机器人,若干个所述检测机器人与检测平台连接,并设置于检测平台上,当所述检测机器人接收到检测命令时可与检测平台脱离,并到达指定位置进行环境数据的检测,当检测机器人检测结束后复位至检测平台上,检测平台将检测机器人锁紧;
7.通信系统,所述通信系统与检测平台连接,用于命令数据的传输;
8.管理系统,所述管理系统与通信系统连接,用于命令的指派以及数据的处理。
9.优选的,所述检测机器人包括:
10.检测机器人主体,所述检测机器人主体内设置有plc控制模块;
11.坐标定位模块和驱动模块,所述plc控制模块依次与坐标定位模块和驱动模块连接,坐标定位模块用于检测位置的定位,驱动模块用于驱动检测机器人主体移动到定位的位置;
12.碰撞感应模块和障碍物感应模块,所述碰撞感应模块和障碍物感应模块均与plc控制模块连接,用于检测触碰障碍物和监测周围一定范围内障碍物状况,所述碰撞感应模块和障碍物感应模块均与位置调整模块连接,且位置调整模块与驱动模块连接,当有障碍物时用来调整驱动模块的移动路径;
13.采集模块、检测模块和数据生成模块,所述采集模块、检测模块和数据生成模块依
次与plc控制模块连接,采集模块用于采集取样,检测模块用于检测样品的各项数据,数据生成模块用于将检测各项数据生成报表;
14.数据储存模块,所述数据储存模块与plc控制模块连接,用于储存检测后的数据;
15.无线传输模块,所述无线传输模块与plc控制模块连接,用于实现远程的操控;
16.所述plc控制模块依次与供电模块和光伏模块连接,光伏模块吸收太阳能转换为电能,供电模块用于储存电能以达到持续供电。
17.优选的,所述障碍物感应模块可以为红外传感器、超声波传感器和激光扫描仪的任一种。
18.优选的,所述plc控制模块与监视模块连接,所述监视模块包括拍摄模块和照明模块,用于对检测环境的拍摄。
19.优选的,所述碰撞感应模块按顺时针每隔25度分别设置在检测机器人主体的外壁圆周上。
20.优选的,所述检测平台与监控模块连接,且监控模块设置与检测平台上,用于实时监控检测机器人。
21.优选的,所述管理平台包括在线监控模块、状态评价模块、预警模块和应急方案模块,所述在线监控模块与状态评价模块连接,所述状态评价模块分别与预警模块和应急方案模块连接;
22.其中,在线监控模块用于保障环境监测结果的实时性,并具有监测、统计、发布的功能,使得平台工作人员能根据平台的显示界面调出需要查看的数据信息;
23.状态评价模块用于对特定区域的环境进行综合分析得到一个相对准确的评估,在评价的时候可根据具体的环境情况记录在相应的评价表格中;
24.预警模块用于针对环境发生突然性的污染,及时的发出警报,提醒检测人员,以便于监控人员采取有效的措施,防止被污染扩散;
25.应急方案模块用于储存相对应的解决方案,当环境发生污染时工作人员可在该模块中查找相对应的解决方法,以便于阻止更坏的后果;
26.所述操控平台包括远程监控pc、后台处理系统、后台数据库和移动终端;
27.其中,所述远程监控pc,用于远程操控以及设置环境监测的参数;
28.后台处理系统,用于完成与移动终端以及界面的交互功能,包括移动终端数据的接收和处理、信息的储存、实时状态信息的更新;
29.后台数据库,用于将储存的环境状态信息类型进行划分;
30.移动终端,用于实现远程在线对检测机器人进行监控与管理。
31.本发明提出的一种能够实时监测环境的物联网系统,有益效果在于:
32.本发明可以对需要检测的环境的位置定位,并使检测机器人主体智能的移动到达需要检测的位置,可以实现了监测机器人的完全自主运动,到达需要检测的位置时可以对当前环境进行取样,并检测样品的环境数据,能够实时对所监测区域的环境数据进行处理、传输,使技术人员可以很直观的观察到环境的变化,减少了技术人员的工作难度,大大提高了环境的监测效果,通过以物联网技术为依托构建的环境监测体系包含了多种高水平技术的使用,通过建立管理平台和操控平台,能够让操作人员在平台端实时的了解所检测区域的具体情况,遇到突发性问题时可以及时的进行解决,可以在很大程度上提高环境的监测
准确性,实现环境监测的高效率。
附图说明
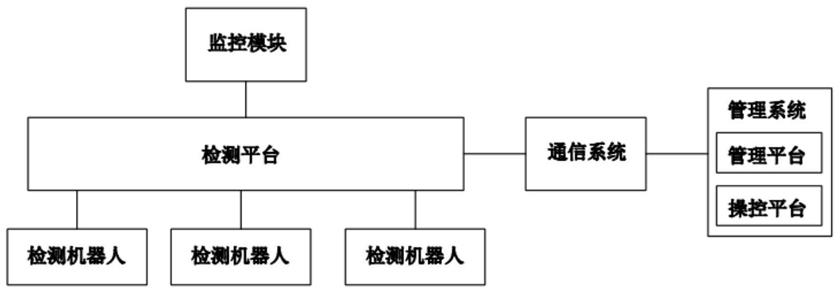
33.图1为本发明所述一种能够实时监测环境的物联网系统的原理框图;
34.图2为本发明所述一种能够实时监测环境的物联网系统的检测机器人原理框图;
35.图3为本发明所述一种能够实时监测环境的物联网系统的管理平台原理框图;
36.图4为本发明所述一种能够实时监测环境的物联网系统的操控平台原理框图。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.请参阅图1-4,本发明提供一种技术方案:一种能够实时监测环境的物联网系统,包括;检测平台、若干个检测机器人、通信系统和管理系统;若干个检测机器人与检测平台连接,并设置于检测平台上,当检测机器人接收到检测命令时可与检测平台脱离,并到达指定位置进行环境数据的检测,当检测机器人检测结束后复位至检测平台上,检测平台将检测机器人锁紧,检测平台与监控模块连接,且监控模块设置与检测平台上,用于实时监控检测机器人,通信系统与检测平台连接,用于命令数据的传输,管理系统与通信系统连接,用于命令的指派以及数据的处理。
39.更具体的,检测机器人包括:检测机器人主体、坐标定位模块、驱动模块、碰撞感应模块、障碍物感应模块、采集模块、检测模块、数据生成模块、数据储存模块和无线传输模块,检测机器人主体内设置有plc控制模块,plc控制模块依次与坐标定位模块和驱动模块连接,坐标定位模块用于检测位置的定位,驱动模块用于驱动检测机器人主体移动到定位的位置,碰撞感应模块和障碍物感应模块均与plc控制模块连接,用于检测触碰障碍物和监测周围一定范围内障碍物状况,碰撞感应模块按顺时针每隔25度分别设置在检测机器人主体的外壁圆周上,碰撞感应模块和障碍物感应模块均与位置调整模块连接,且位置调整模块与驱动模块连接,当有障碍物时用来调整驱动模块的移动路径,采集模块、检测模块和数据生成模块依次与plc控制模块连接,采集模块用于采集取样,检测模块用于检测样品的各项数据,数据生成模块用于将检测各项数据生成报表,数据储存模块与plc控制模块连接,用于储存检测后的数据,无线传输模块与plc控制模块连接,用于实现远程的操控。
40.进一步的,plc控制模块依次与供电模块和光伏模块连接,光伏模块吸收太阳能转换为电能,供电模块用于储存电能以达到持续供电。
41.进一步的,障碍物感应模块可以为红外传感器、超声波传感器和激光扫描仪的任一种。
42.进一步的,plc控制模块与监视模块连接,监视模块包括拍摄模块和照明模块,用于对检测环境的拍摄。
43.更具体的,管理平台包括在线监控模块、状态评价模块、预警模块和应急方案模块,在线监控模块与状态评价模块连接,状态评价模块分别与预警模块和应急方案模块连
接;
44.其中,在线监控模块用于保障环境监测结果的实时性,并具有监测、统计、发布的功能,使得平台工作人员能根据平台的显示界面调出需要查看的数据信息;状态评价模块用于对特定区域的环境进行综合分析得到一个相对准确的评估,在评价的时候可根据具体的环境情况记录在相应的评价表格中;预警模块用于针对环境发生突然性的污染,及时的发出警报,提醒检测人员,以便于监控人员采取有效的措施,防止被污染扩散;应急方案模块用于储存相对应的解决方案,当环境发生污染时工作人员可在该模块中查找相对应的解决方法,以便于阻止更坏的后果。
45.更具体的,操控平台包括远程监控pc、后台处理系统、后台数据库和移动终端;其中,远程监控pc,用于远程操控以及设置环境监测的参数;后台处理系统,用于完成与移动终端以及界面的交互功能,包括移动终端数据的接收和处理、信息的储存、实时状态信息的更新;后台数据库,用于将储存的环境状态信息类型进行划分;移动终端,用于实现远程在线对检测机器人进行监控与管理。
46.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1