一种仿生微型扑翼飞行器飞控硬件系统
1.本发明属于嵌入式系统设计、无人机控制技术领域,特别涉及一种仿生微型扑翼飞行器飞控硬件系统。
背景技术:
2.近年来,仿生微型扑翼飞行器因其微型化、轻量化以及高机动性的特点,在低空侦查、地形勘察、灾害搜救等特种任务中的应用优势,成为各个国家的研发重点。保证仿生微型扑翼飞行器的飞行品质以及特殊任务执行能力,具有稳定而精确地进行姿态控制及轨迹跟踪控制的能力,仿生微型扑翼飞行器飞控系统是不可或缺的功能单元。
3.仿生微型扑翼飞行器飞控系统是一种复杂的电子系统,其设计技术涉及嵌入式系统、电子电路、射频等多个方面,应具有仿生微型扑翼飞行器状态监测、数据处理、无线通信、图像采集和电源管理等功能。仿生微型扑翼飞行器体积小,对重量敏感,对飞控系统的集成度要求高,电路布局不能杂乱,以免在电子元器件之间,特别是射频器件,存在电磁干扰,影响系统工作性能。因此,针对仿生微型扑翼飞行器的飞控系统的微型化和轻量化设计,以及高集成度的电路布局设计仍然是设计难题。此外,飞行系统的多任务处理将大量占据中央处理器的计算资源,例如大量数据的图像传输将抢占处理器对其他任务的处理资源,很大程度上影响飞控系统整体的功能和运行效率。
技术实现要素:
4.本发明提出一种仿生微型扑翼飞行器飞控硬件系统,在实现飞行状态监测、全球定位、无线通信、图像采集等功能的基础上,以分功能独立pcb电路板设计方式,提高元件与电路布局的集成度实现飞控系统的微型化设计,pcb电路板嵌入微型扑翼飞行器机身机构,实现电子模块与飞行器机械结构的高度集成,双处理器的中央主控电路设计将解决中央处理器任务资源占用问题。
5.本发明采用的技术方案为:一种仿生微型扑翼飞行器飞控硬件系统,包括:飞控硬件系统、机械系统驱动器、机载外设,所述飞控硬件系统包括:中央主控电路、摄像头驱动模块与射频模块,所述摄像头驱动模块与射频模块分别与中央主控电路相连,所述中央主控电路、摄像头驱动模块与射频模块分别采用独立pcb电路板设计;
6.所述的机械系统驱动器包括:微型无刷电机系统、偏航驱动舵机、俯仰姿态驱动舵机,所述微型无刷电机系统、偏航驱动舵机、俯仰姿态驱动舵机分别与中央主控电路相连,所述的机载外设包括:微型摄像头,所述微型摄像头与中央主控电路相连。
7.中央主控电路板包括:主副处理器,所述主副处理器之间采用uart通讯连接。
8.所述主处理器挂载惯性导航单元、气压高度计及全球定位芯片。
9.所述副处理器挂载射频模块、微型摄像头。
10.所述的中央主控电路、摄像头驱动模块,重叠嵌入于仿生微型扑翼飞行器机身结构中部。
11.所述的射频电路板嵌入于仿生微型扑翼飞行器的尾部结构。
12.中央主控电路、摄像头驱动模块与射频模块各自的pcb电路板之间通过fpc软排线相互连接。
13.本发明的有益效果:本发明将飞控硬件电路系统,采用模块化设计方式,分功能独立设计电路板,对功能部件进行有效分区,保证电路与元件集成度的同时,提升各功能模块硬件系统的微型化程度;双cpu模式对各功能模块进行合理的任务与通信划分,降低了各处理器的资源占用,有效提高了飞控系统对各任务的执行效率;飞控硬件系统与仿生微型扑翼飞行器机身结构的嵌入式一体集成设计与布局,将提升飞控硬件系统与扑翼飞行器的布局集成程度,有助于进一步提升扑翼飞行器结构的微型化程度。
附图说明
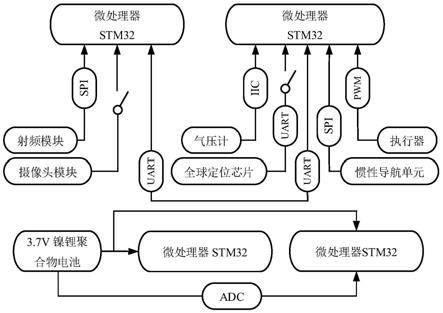
14.图1是本发明专利提供的仿生微型扑翼飞行器飞控硬件系统的框架图;
15.图2是本发明专利提供的仿生微型扑翼飞行器飞控硬件系统的布局图;
16.图3是本发明专利提供的中央控制电路板的结构图;
17.其中,(a)是中央控制电路板结构图的正面,(b)是中央控制电路板结构图的背面;
18.图4是本发明专利提供的射频电路板的结构图;
19.图5是本发明专利提供的摄像头驱动电路板的结构图;
20.其中,(a)是摄像头驱动电路板结构图的正面,(b)是摄像头驱动电路板结构图的背面。
具体实施方式
21.为便于本领域技术人员理解本发明的技术内容,下面结合附图对本发明内容进一步阐释。
22.一种仿生微型扑翼飞行器飞控硬件系统按功能划分,包括:中央主控模块、摄像头驱动模块、射频模块,各功能模块独立设计pcb电路板,包括:中央主控电路板、摄像头驱动电路板、射频电路板。有效的功能分区将减少元器件间的交叉布局,独立的pcb电路板设计,将获得布局紧凑、空间利用率高的pcb系统,提升飞控系统抗电磁干扰能力,保证射频模块的性能。
23.一种仿生微型扑翼飞行器飞控硬件系统,其中央主控电路、摄像头驱动电路、射频电路及各模块之间的通信线路组成完整的飞控系统,所述电路原理图如图1所示。所述飞控系统的中央主控电路设置有:采用双处理器模式包括主副处理器,即图1中的2个微处理器stm32,uart通讯连接用于主副处理器之间的数据与命令传输。
24.所述主处理器挂载惯性导航单元、气压高度计及全球定位芯片。所述惯性导航单元,通过spi通讯接口连接主处理器,用于检测仿生微型扑翼飞行器的飞行状态;所述气压高度计模块通过iic通讯接口连接主处理器,用于采集大气压力与大气温度,并转化为飞行高度信息;所述全球定位芯片,通过uart通讯接口连接主处理器,用于采集gps/北斗/glonass全球定位经纬度与海拔高度信息,全球定位芯片与主处理器间连接开关电路,用于控制全球定位功能的开启与屏蔽。
25.所述副处理器挂载射频模块、摄像头模块。所述射频模块,通过spi通信接口连接
副处理器,采用433mhz通信频率,用于向地面人员传输采集数据与接收任务指令;所述摄像头模块,通过普通gpio连接副处理器的数据接口,用于采集图像与视频数据,摄像头模块与副处理器之间连接开关电路,用于控制图像采集功能的开启与屏蔽。
26.所述的仿生微型扑翼飞行器飞控硬件系统由3.7v可充电镍锂聚合物电池统一供电,电池通过adc(analogue-to-digitalconversion,模数转换)接口连接于主处理器,用于检测电池电压并进行电源管理。
27.所述的仿生微型扑翼飞行器飞控硬件系统,预置用于连接机械系统驱动器的外设接口,主处理器向机械系统驱动器输出pwm(pulse width modulation,脉冲宽度调制)信号,用于外接驱动器的控制。
28.一种仿生微型扑翼飞行器硬件系统布局,如图2所示,所述飞控硬件系统、机械系统驱动器、机载外设,与仿生微型扑翼飞行器的机身结构实施嵌入式一体化设计。所述的飞控硬件系统包括:中央主控电路板2、摄像头驱动电路板3、射频电路板7;所述的机械系统驱动器包括:微型无刷电机系统1、偏航驱动舵机5、俯仰姿态驱动舵机6;所述的机载外设包括:微型摄像头4。
29.所述的中央主控电路板2、摄像头驱动电路板3,重叠嵌入于仿生微型扑翼飞行器机身结构中部,作为微型扑翼飞行器的机身骨架,起中部机身连接作用,摄像头驱动电路板3挂载微型摄像头4;所述的射频电路板7,嵌入于仿生微型扑翼飞行器的尾部结构,作为仿生微型扑翼飞行器的尾部骨架,同时,作为布置于最下方的俯仰姿态驱动舵机6的支撑结构。所述的中央主控电路板2、摄像头驱动电路板3、射频电路板7,通过fpc软排线相互连接,实现各电路模块的供电与通信。
30.所述的仿生微型扑翼飞行器飞控硬件系统的中央主控电路板,如图3所示,采用4层板设计,电路板尺寸为30mm*40mm,pcb板厚度为0.8mm,表层铜箔厚度为18μm,导线宽为4~10mil,导线间距为3.5~7mil,导电孔孔径为12mil。
31.所述仿生微型扑翼飞行器飞控硬件系统的中央主控电路板结构正面,如图3(a)所示,包括:主处理器u1、副处理器u7、工作指示灯、外设接口、模块通信接口及外围电路的电阻、电容和电感元件。
32.所述的中央主控电路板的主处理器u1,对称布置于电路板的中上部,副处理器u7布置于主处理器u1下方,与主处理器左侧对齐。
33.所述的中央主控电路板的工作指示灯,包括:主处理器工作指示灯d1,副处理器工作指示灯d2。主处理器工作指示灯d1通过灯语信号指示主处理器u1的工作状态,布置于主处理器u1的左下部;副处理器工作指示灯d2指示副处理器u7的工作状态,同时反馈摄像头模块、射频模块的工作信号;工作指示灯d1、d2将共同指示仿生微型扑翼飞行器的机载能源状态。
34.所述的中央主控电路板的外设接口,包括:电源接口j2,jtag接口j1、j8,全球定位天线接口j7,机械系统的驱动器接口j3、j4、j5、j6。
35.所述的中央主控电路板的模块通信接口,包括:摄像头模块接口p1、射频模块接口p2,通信接口与各模块间均采用fpc软排线进行电路连接,实现供电与通信。
36.仿生微型扑翼飞行器飞控硬件系统的中央主控电路板结构背面,如图3(b)所示,包括:全球定位芯片u2、气压高度计u3、惯性导航单元u4、电源管理芯片u5,以及外围电路的
电阻、电容与电感元件。
37.所述的全球定位系统芯片u1采集gps/北斗/glonass全球定位经纬度与海拔高度信息,对称布置于中央主控电路板背面的中上部;所述的气压高度计u3采集大气压力与大气温度,并转化为飞行高度信息,布置于惯性导航单元u4下方;所述的惯性导航单元u4采集仿生微型扑翼飞行器飞行姿态、飞行速度、飞行加速度及航向等飞行状态信息,布置于全球定位系统芯片u1下方。全球定位系统芯片u1、气压高度计u3、惯性导航单元u4布置位置左端对齐。所述的电源管理芯片u5,管理机载电源,将电源电压稳压至3.7v,布置位于中央主控电路板背面右下角位置。
38.所述的仿生微型扑翼飞行器飞控硬件系统的射频电路板,如图4所示,采用两层板设计,电路板外形为35.2mm*22mm的类长方形异形结构,pcb板厚度为0.4mm,表层铜箔厚度为35μm,导线宽为10mil,导线间距为10mil,导电孔孔径为12mil。
39.所述的仿生微型扑翼飞行器飞控硬件系统的射频电路板,元器件均布置于一面,包括:射频芯片u1,射频天线接口j1、模块通信接口p1及外围电路的电阻、电容与电感元件。
40.所述的射频电路板上的射频芯片u1,布置于射频电路pcb板的中部位置;模块通信接口p1连接fpc软排线,用于与中央主控模块的供电与通信,模块通信接口p1与射频天线接口j1对称布置于射频电路板上下两侧。
41.所述的仿生微型扑翼飞行器飞控硬件系统的摄像头驱动电路板,如图5所示,采用4层板设计,电路板尺寸为20mm*20mm,pcb板厚度为0.8mm,表层铜箔厚度为18μm,导线宽为4~10mil,导线间距为3.5~7mil,导电孔孔径为12mil。
42.所述的仿生微型扑翼飞行器飞控硬件系统的摄像头驱动电路板结构正面,如图5(a)所示,包括:晶振元件y1、电源管理芯片u3、模块通信接口以及外围电路的电阻、电容和电感元件。
43.所述的晶振元件y1,为摄像头驱动模块提供12mhz的时钟信号,实现摄像头驱动模块的指令执行;晶振元件y1布置于摄像头驱动电路pcb板正面的左下部位置。
44.所述的电源管理芯片u3,作用为:管理机载能源向摄像头驱动模块的供电,将输入电压稳压至3.3v;电源管理芯片u3布置于摄像头驱动电路pcb板正面的下侧。
45.所述的模块通信接口包括:中央主控电路模块通信接口p1、微型摄像头通信接口p2;模块通信接口p1、p2采用fpc软排线连接,实现模块间的供电与通信;模块通信接口p1、p2对称布置于摄像头驱动电路板正面的左右两侧。
46.所述的仿生微型扑翼飞行器飞控硬件系统的摄像头驱动电路板结构背面,如图5(b)所示,主要包括:数据缓存芯片u1、外围电路的电阻、电容和电感元件。
47.所述的数据缓存芯片u1用于缓存并处理微型摄像头采集的图像数据,向中央主控模块通过通信线路发送图像数据;数据缓存芯片u1布置于摄像头驱动电路pcb板背面的中部位置。
48.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1