一种滑翔高超声速飞行器末端位置和速度控制方法与流程
1.本发明涉及制导技术领域,尤其涉及一种滑翔高超声速飞行器末端位置和速度控制方法。
背景技术:
2.滑翔飞行器再入大气后,依靠气动力控制飞行,在整个再入飞行段,高度和速度跨度大,运动学与动力学模型复杂,约束条件多,弹道设计难度也较大。为满足飞行器滑翔段和下压段的交班要求,有效打击目标,需要滑翔段满足末端经度、末端纬度、末端期望高度以及末端期望速度的约束。
3.相关技术中,末端经度和末端纬度的约束相对容易满足,但是,满足末端期望高度以及末端期望速度的约束时需要进行弹道积分,计算量大,计算速度慢,导致不能及时对弹道进行规划并调整飞行策略。
技术实现要素:
4.本发明的主要目的在于提供一种滑翔高超声速飞行器末端位置和速度控制方法,旨在解决飞行器滑翔段,计算量大,计算速度慢,导致不能及时对弹道进行规划并调整飞行策略,从而飞行器无法满足末端期望高度和末端期望速度的约束的问题。
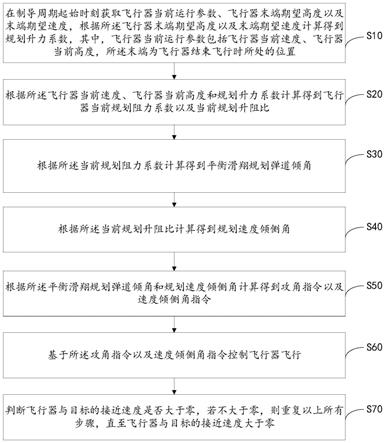
5.本发明提供一种滑翔高超声速飞行器末端位置和速度控制方法,所述滑翔高超声速飞行器末端位置和速度控制方法包括:
6.在制导周期起始时刻获取飞行器当前运行参数、飞行器末端期望高度以及末端期望速度,根据所述飞行器末端期望高度以及末端期望速度计算得到规划升力系数,其中,飞行器当前运行参数包括飞行器当前速度、飞行器当前高度,所述末端为飞行器结束飞行时所处的位置;
7.根据所述飞行器当前速度、飞行器当前高度和规划升力系数计算得到飞行器当前规划阻力系数以及当前规划升阻比;
8.根据所述当前规划阻力系数计算得到平衡滑翔规划弹道倾角;
9.根据所述当前规划升阻比计算得到规划速度倾侧角;
10.根据所述平衡滑翔规划弹道倾角和规划速度倾侧角计算得到攻角指令以及速度倾侧角指令;
11.基于所述攻角指令以及速度倾侧角指令控制飞行器飞行;
12.判断飞行器与目标的接近速度是否大于零,若不大于零,则重复以上所有步骤,直至飞行器与目标的接近速度大于零。
13.可选的,所述根据所述飞行器末端期望高度以及末端期望速度计算得到规划升力系数的步骤包括:
14.获取飞行器质量、飞行器参考面积、飞行器重力加速度、末端地心距离以及末端大气密度;
15.将飞行器末端期望高度、末端期望速度、飞行器质量、飞行器参考面积、飞行器末端重力加速度、末端地心距离以及末端大气密度代入第一预设公式计算得到规划升力系数,第一预设公式如下:其中,r
t
=re+h
t
,(c
l
)
plan
为规划升力系数,v
t
为末端期望速度,g
t
为飞行器末端重力加速度,r
t
为飞行器末端地心距离,re为地球平均半径,h
t
为飞行器末端期望高度,m为飞行器质量,ρ
t
为飞行器末端大气密度,s为飞行器参考面积,μ为地球引力常数。
16.可选的,所述根据所述飞行器当前速度、飞行器当前高度和规划升力系数计算得到飞行器当前规划阻力系数以及当前规划升阻比的步骤包括:
17.将飞行器当前速度、当前高度和规划升力系数代入第二预设公式,计算得到当前规划攻角,第二预设公式如下:c
l
(v,h,α
plan
)=(c
l
)
plan
,其中,v为飞行器当前速度,h为飞行器当前高度,α
plan
为飞行器当前规划攻角,(c
l
)
plan
为规划升力系数;
18.将当前规划攻角代入第三预设公式,计算得到当前规划阻力系数,第三预设公式如下:cd(v,h,α
plan
)=(cd)
plan
,其中,(cd)
plan
为当前规划阻力系数;
19.计算规划升力系数与当前规划阻力系数的比值得到当前规划升阻比。
20.可选的,所述根据所述当前规划阻力系数计算得到平衡滑翔规划弹道倾角的步骤包括:
21.将当前规划阻力系数代入第四预设公式计算得到平衡滑翔规划弹道倾角θ
plan
,第四预设公式如下:其中,r=re+h,ρ为飞行器所在当地的大气密度,s为飞行器参考面积,r为当前飞行器地心距离,re为地球平均半径,h为飞行器当前高度,m为飞行器质量,v为飞行器当前速度,(cd)
plan
为当前规划阻力系数,β为高度系数,g为飞行器所在当地的重力加速度。
22.可选的,所述根据所述当前规划升阻比计算得到规划速度倾侧角的步骤包括:
23.获取飞行器当前的经度、纬度和比能量以及飞行器末端的经度、纬度以及比能量;
24.将飞行器当前的比能量以及末端的比能量代入第五预设公式,计算得到飞行器当前位置和飞行器末端位置之间的纵程(xd)
go
,第五预设公式如下:其中,k
plan
为飞行器当前规划升阻比,re为地球平均半径,r
t
为飞行器末端地心距离,e
t
为飞行器末端比能量,μ为地球引力常数,e为飞行器当前比能量;
25.将飞行器当前的经度和纬度以及飞行器末端的经度和纬度代入第六预设公式,计算得到飞行器当前位置和目标位置之间的纵程(xd)
tm
,第六预设公式如下:
26.(xd)
tm
=rearccos[cosφcosφ
t
cos(λ-λ
t
)+sinφsinφ
t
]
[0027]
其中,φ为飞行器当前纬度,φ
t
为飞行器末端纬度,λ为飞行器当前经度,λ
t
为飞行器末端经度;
[0028]
将飞行器当前位置和飞行器末端位置之间的纵程(xd)
go
以及飞行器当前位置和目标位置之间的纵程(xd)
tm
代入第七预设公式,计算得到规划速度倾侧角(γv)
plan
,第七预设
公式如下:
[0029]
可选的,所述根据所述平衡滑翔规划弹道倾角和规划速度倾侧角计算得到攻角指令以及速度倾侧角指令的步骤包括:
[0030]
将平衡滑翔规划弹道倾角、规划速度倾侧角以及飞行器当前规划攻角代入第八预设公式,计算得到攻角指令,第八预设公式如下:αc=α
plan
+cos[(γv)
plan
]
·kθ
(θ
plan-θ),其中,αc为攻角指令,k
θ
为控制常数,θ
plan
为平衡滑翔规划弹道倾角,(γv)
plan
为规划速度倾侧角,α
plan
为飞行器当前规划攻角,θ为飞行器当前弹道倾角;
[0031]
获取飞行器滑行段开始时刻的飞行器和目标之间的距离以及目标在当前飞行器坐标系下的x坐标、y坐标和z坐标;
[0032]
根据所述x坐标和z坐标计算得到当前飞行器水平方向的目标视线角q
β
;
[0033]
根据所述x坐标、y坐标和z坐标计算得到当前飞行器和目标之间的距离r
tm
;
[0034]
根据飞行器滑行段开始时刻的飞行器和目标之间的距离和当前飞行器和目标之间的距离计算得到飞行器角偏差阈值;
[0035]
将规划速度倾侧角和平衡滑翔规划弹道倾角代入第九预设公式,计算得到速度倾侧角指令,第九预设公式如下:
[0036][0037]
其中,(γv)c为速度倾侧角指令,(γv)
plan
为规划速度倾侧角,q
tol
为飞行器角偏差阈值,(r
tm
)0为飞行器滑行段开始时刻的飞行器和目标之间的距离,r
tm
为当前飞行器和目标之间的距离,q0为飞行器偏差阈值初始值,k
γ
为追踪比例常数,σ为当前飞行器弹道偏角,(r
tm
)
tol
为飞行器和目标之间的距离阈值。
[0038]
本发明中,在制导周期起始时刻获取飞行器当前运行参数、飞行器末端期望高度以及末端期望速度,根据所述飞行器末端期望高度以及末端期望速度计算得到规划升力系数,其中,飞行器当前运行参数包括飞行器当前速度、飞行器当前高度,所述末端为飞行器结束飞行时所处的位置;根据所述飞行器当前速度、飞行器当前高度和规划升力系数计算得到飞行器当前规划阻力系数以及当前规划升阻比;根据所述当前规划阻力系数计算得到平衡滑翔规划弹道倾角;根据所述当前规划升阻比计算得到规划速度倾侧角;根据所述平衡滑翔规划弹道倾角和规划速度倾侧角计算得到攻角指令以及速度倾侧角指令;基于所述攻角指令以及速度倾侧角指令控制飞行器飞行;判断飞行器与目标的接近速度是否大于零,若不大于零,则重复以上所有步骤,直至飞行器与目标的接近速度大于零。通过本发明,在飞行器满足末端期望经度、末端期望纬度、末端期望高度以及末端期望速度约束时,不需要再进行弹道积分,而是通过解析公式计算出攻角指令以及速度倾侧角指令,计算量小,计算速度快,解决了现有技术中飞行器满足滑翔段末端期望高度以及末端期望速度的约束时,计算量大,计算速度慢,导致不能及时对弹道进行规划并调整飞行策略的问题。
附图说明
[0039]
图1为本发明滑翔高超声速飞行器末端位置和速度控制方法第一实施例的流程示意图;
[0040]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0041]
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0042]
本发明实施例提供了一种滑翔高超声速飞行器末端位置和速度控制方法。
[0043]
一实施例中,参照图1,图1为本发明滑翔高超声速飞行器末端位置和速度控制方法第一实施例的流程示意图。如图1所示,滑翔高超声速飞行器末端位置和速度控制方法,包括:
[0044]
步骤s10,在制导周期起始时刻获取飞行器当前运行参数、飞行器末端期望高度以及末端期望速度,根据所述飞行器末端期望高度以及末端期望速度计算得到规划升力系数,其中,飞行器当前运行参数包括飞行器当前速度、飞行器当前高度,所述末端为飞行器结束飞行时所处的位置;
[0045]
本实施例中,飞行器当前运行参数包括飞行器当前运行速度、飞行器当前距离海平面的高度,飞行器末端期望高度为飞行器结束飞行时所处的位置距离海平面的高度,飞行器末端期望速度为飞行器结束飞行时在所处的位置的速度。根据飞行器末端期望高度和飞行器末端期望速度,计算得到飞行器在整个滑翔段的规划升力系数。
[0046]
进一步地,一实施例中,所述根据所述飞行器末端期望高度以及末端期望速度计算得到规划升力系数的步骤包括:
[0047]
获取飞行器质量、飞行器参考面积、飞行器重力加速度、末端地心距离以及末端大气密度;
[0048]
将飞行器末端期望高度、末端期望速度、飞行器质量、飞行器参考面积、飞行器末端重力加速度、末端地心距离以及末端大气密度代入第一预设公式计算得到规划升力系数,第一预设公式如下:其中,r
t
=re+h
t
,(c
l
)
plan
为规划升力系数,v
t
为末端期望速度,g
t
为飞行器末端重力加速度,r
t
为飞行器末端地心距离,re为地球平均半径,h
t
为飞行器末端期望高度,m为飞行器质量,ρ
t
为飞行器末端大气密度,s为飞行器参考面积,μ为地球引力常数。
[0049]
本实施例中,将飞行器末端期望高度h
t
和飞行器末端期望速度v
t
代入第一预设公式中,计算得到规划升力系数(c
l
)
plan
,其中,m为飞行器质量,g
t
为飞行器末端重力加速度,μ为地球引力常数,v
t
为末端期望速度,r
t
为飞行器末端地心距离,r
t
=re+h
t
,re为地球平均半径,h
t
为飞行器末端期望高度,ρ
t
为飞行器末端大气密度,ρ
t
=ρse-βh
,ρs为海平面大气密度,h为飞行器当前高度,β为高度系数,β=1.3889
×
10-4
m-1
,s为飞行器参考面积。
[0050]
步骤s20,根据所述飞行器当前速度、飞行器当前高度和规划升力系数计算得到飞
行器当前规划阻力系数以及当前规划升阻比;
[0051]
本实施例中,根据飞行器当前速度、飞行器当前高度和规划升力系数求得飞行器当前规划攻角,再根据飞行器当前速度、飞行器当前高度和飞行器当前规划攻角计算得到飞行器当前规划阻力系数,计算规划升力系数和飞行器当前规划阻力系数的比值得到飞行器当前规划升阻比。
[0052]
进一步地,一实施例中,步骤s20包括:
[0053]
将飞行器当前速度、当前高度和规划升力系数代入第二预设公式,计算得到当前规划攻角,第二预设公式如下:c
l
(v,h,α
plan
)=(c
l
)
plan
,其中,v为飞行器当前速度,h为飞行器当前高度,α
plan
为飞行器当前规划攻角,(c
l
)
plan
为规划升力系数;
[0054]
将当前规划攻角代入第三预设公式,计算得到当前规划阻力系数,第三预设公式如下:cd(v,h,α
plan
)=(cd)
plan
,其中,(cd)
plan
为当前规划阻力系数;
[0055]
计算规划升力系数与当前规划阻力系数的比值得到当前规划升阻比。
[0056]
本实施例中,将飞行器当前速度v、当前高度h和规划升力系数(c
l
)
plan
代入第二预设公式c
l
(v,h,α
plan
)=(c
l
)
plan
计算得到飞行器当前规划攻角α
plan
,将飞行器当前规划攻角α
plan
、飞行器当前速度v、当前高度h代入第三预设公式cd(v,h,α
plan
)=(cd)
plan
计算得到当前规划阻力系数(cd)
plan
。计算规划升力系数(c
l
)
plan
与当前规划阻力系数(cd)
plan
的比值得到当前规划升阻比k
plan
,即
[0057]
步骤s30,根据所述当前规划阻力系数计算得到平衡滑翔规划弹道倾角;
[0058]
本实施例中,根据步骤s10中获取的飞行器当前运行参数以及步骤s20中计算得到的飞行器当前规划阻力系数,计算得到平衡滑翔规划弹道倾角。其中,飞行器当前运行参数还包括飞行器所在当地的大气密度、飞行器所在的当地的重力加速度以及当前飞行器地心距离。
[0059]
进一步地,一实施例中,步骤s30包括:
[0060]
将当前规划阻力系数代入第四预设公式计算得到平衡滑翔规划弹道倾角θ
plan
,第四预设公式如下:其中,r=re+h,ρ为飞行器所在当地的大气密度,s为飞行器参考面积,r为当前飞行器地心距离,re为地球平均半径,h为飞行器当前高度,m为飞行器质量,v为飞行器当前速度,(cd)
plan
为当前规划阻力系数,β为高度系数,g为飞行器所在当地的重力加速度。
[0061]
本实施例中,将当前规划阻力系数、飞行器所在当地的大气密度、飞行器所在的当地的重力加速度以及当前飞行器地心距离代入第四预设公式求得平衡滑翔规划弹道倾角θ
plan
,第四预设公式如下:其中,其中,r=re+h,ρ为飞行器所在当地的大气密度,s为飞行器参考面积,r为当前飞行器地心距离,re为地球平均半径,h为飞行器当前高度,m为飞行器质量,v为飞行器当前速度,
(cd)
plan
为当前规划阻力系数,β为高度系数,g为飞行器所在当地的重力加速度。
[0062]
步骤s40,根据所述当前规划升阻比计算得到规划速度倾侧角;
[0063]
本实施例中,根据步骤s10中获取的飞行器当前运行参数以及飞行器末端的经度、纬度和比能量计算得到飞行器当前位置和目标位置之间的纵程,其中,飞行器当前运行参数还包括:飞行器当前的经度、纬度和比能量。根据。根据飞行器当前的比能量、末端的比能量以及飞行器当前规划升阻比计算得到飞行器当前位置和飞行器末端位置之间的纵程,根据飞行器当前位置和目标位置之间的纵程与飞行器当前位置和飞行器末端位置之间的纵程即可求得规划速度倾侧角。
[0064]
进一步地,一实施例中,步骤s40包括:
[0065]
获取飞行器当前的经度、纬度和比能量以及飞行器末端的经度、纬度以及比能量;
[0066]
将飞行器当前的比能量以及末端的比能量代入第五预设公式,计算得到飞行器当前位置和飞行器末端位置之间的纵程(xd)
go
,第五预设公式如下:其中,k
plan
为飞行器当前规划升阻比,re为地球平均半径,r
t
为飞行器末端地心距离,e
t
为飞行器末端比能量,μ为地球引力常数,e为飞行器当前比能量;
[0067]
将飞行器当前的经度和纬度以及飞行器末端的经度和纬度代入第六预设公式,计算得到飞行器当前位置和目标位置之间的纵程(xd)
tm
,第六预设公式如下:
[0068]
(xd)
tm
=rearccos[cosφcosφ
t
cos(λ-λ
t
)+sinφsinφ
t
]
[0069]
其中,φ为飞行器当前纬度,φ
t
为飞行器末端纬度,λ为飞行器当前经度,λ
t
为飞行器末端经度;
[0070]
将飞行器当前位置和飞行器末端位置之间的纵程(xd)
go
以及飞行器当前位置和目标位置之间的纵程(xd)
tm
代入第七预设公式,计算得到规划速度倾侧角(γv)
plan
,第七预设公式如下:
[0071]
本实施例中,将飞行器当前的比能量e、末端的比能量e
t
以及飞行器当前规划升阻比k
plan
代入第五预设公式计算得到飞行器当前位置和飞行器末端位置之间的纵程(xd)
go
,其中,v
t
为末端期望速度,v为飞行器当前速度,μ为地球引力常数,r
t
为飞行器末端地心距离,r为当前飞行器地心距离。
[0072]
将飞行器当前的经度λ和纬度φ以及飞行器末端的经度λ
t
和纬度φ
t
代入第六预设公式(xd)
tm
=rearccos[cosφcosφ
t
cos(λ-λ
t
)+sinφsinφ
t
]计算得到飞行器当前位置和目标位置之间的纵程(xd)
tm
。
[0073]
将飞行器当前位置和飞行器末端位置之间的纵程(xd)
go
以及飞行器当前位置和目标位置之间的纵程(xd)
tm
代入第七预设公式,计算得到规划速度倾侧角(γv)
plan
,第七预设公式如下:
[0074]
步骤s50,根据所述平衡滑翔规划弹道倾角和规划速度倾侧角计算得到攻角指令
以及速度倾侧角指令;
[0075]
本实施例中,根据平衡滑翔规划弹道倾角和规划速度倾侧角计算得到攻角指令,根据当前飞行器弹道偏角与当前飞行器水平方向的目标视线角之间的差值大小,通过平衡滑翔规划弹道倾角和规划速度倾侧角求得相应的速度倾侧角指令。
[0076]
进一步地,一实施例中,步骤s50包括:
[0077]
将平衡滑翔规划弹道倾角、规划速度倾侧角以及飞行器当前规划攻角代入第八预设公式,计算得到攻角指令,第八预设公式如下:αc=α
plan
+cos[(γv)
plan
]
·kθ
(θ
plan-θ),其中,αc为攻角指令,k
θ
为控制常数,θ
plan
为平衡滑翔规划弹道倾角,(γv)
plan
为规划速度倾侧角,α
plan
为飞行器当前规划攻角,θ为飞行器当前弹道倾角;
[0078]
获取飞行器滑行段开始时刻的飞行器和目标之间的距离以及目标在当前飞行器坐标系下的x坐标、y坐标和z坐标;
[0079]
根据所述x坐标和z坐标计算得到当前飞行器水平方向的目标视线角q
β
;
[0080]
根据所述x坐标、y坐标和z坐标计算得到当前飞行器和目标之间的距离r
tm
;
[0081]
根据飞行器滑行段开始时刻的飞行器和目标之间的距离和当前飞行器和目标之间的距离计算得到飞行器角偏差阈值;
[0082]
将规划速度倾侧角和平衡滑翔规划弹道倾角代入第九预设公式,计算得到速度倾侧角指令,第九预设公式如下:
[0083][0084]
其中,(γv)c为速度倾侧角指令,(γv)
plan
为规划速度倾侧角,q
tol
为飞行器角偏差阈值,(r
tm
)0为飞行器滑行段开始时刻的飞行器和目标之间的距离,r
tm
为当前飞行器和目标之间的距离,q0为飞行器偏差阈值初始值,k
γ
为追踪比例常数,σ为当前飞行器弹道偏角,(r
tm
)
tol
为飞行器和目标之间的距离阈值。
[0085]
本实施例中,将平衡滑翔规划弹道倾角θ
plan
、规划速度倾侧角(γv)
plan
以及飞行器当前规划攻角α
plan
代入第八预设公式,计算得到攻角指令,第八预设公式如下:αc=α
plan
+cos[(γv)
plan
]
·kθ
(θ
plan-θ),其中,k
θ
为控制常数,具体地,k
θ
=3。
[0086]
将目标在当前飞行器坐标系下的x坐标x
t
、y坐标y
t
和z坐标z
t
代入公式中计算当前飞行器和目标之间的距离r
tm
,其中,飞行器坐标系的原点在飞行器质心,x轴指向北,y轴指向上,z轴指向东。
[0087]
将目标在当前飞行器坐标系下的x坐标x
t
和z坐标z
t
代入公式
中计算得到当前飞行器水平方向的目标视线角q
β
。
[0088]
将飞行器滑行段开始时刻的飞行器和目标之间的距离与当前飞行器和目标之间的距离代入公式中计算得到飞行器角偏差阈值q
tol
,其中,(r
tm
)0为飞行器滑行段开始时刻的飞行器和目标之间的距离,r
tm
为当前飞行器和目标之间的距离,q0为偏差阈值初始值,具体地,q0=30
°
。
[0089]
获取飞行器和目标之间的距离阈值(r
tm
)
tol
,具体地,(r
tm
)
tol
为0时,末端期望速度和末端期望高度误差为零,(r
tm
)
tol
越大末端期望速度和末端期望高度误差越大,(r
tm
)
tol
越小飞行器倾侧翻转频率越高;(r
tm
)
tol
根据实际飞行器性能和线下弹道仿真结果进行调节,避免倾侧翻转频率超过导弹允许的范围,通常(r
tm
)
tol
=30km。若当前飞行器和目标之间的距离r
tm
大于飞行器和目标之间的距离阈值(r
tm
)
tol
,则计算当前飞行器弹道偏角σ与当前飞行器水平方向的目标视线角q
β
之间的差值。当差值小于飞行器角偏差阈值q
tol
的相反数时,当差值的绝对值小于等于飞行器角偏差阈值q
tol
时,(γv)c=(γv)c,即保持上一时刻的速度倾侧角指令;当差值大于飞行器角偏差阈值q
tol
时,(γv)c=-(γv)
plan
+sin[(γv)
plan
]
·kθ
(θ
plan-θ),其中,(γv)c为速度倾侧角指令,(γv)
plan
为规划速度倾侧角,θ
plan
为平衡滑翔规划弹道倾角,k
θ
为控制常数。
[0090]
若当前飞行器和目标之间的距离r
tm
小于飞行器和目标之间的距离阈值(r
tm
)
tol
,(γv)c=k
γ
(σ-q
β
),其中,σ为当前飞行器弹道偏角,q
β
为当前飞行器水平方向的目标视线角,k
γ
为追踪比例常数,具体地,k
γ
的取值范围在3至10之间。
[0091]
步骤s60,基于所述攻角指令以及速度倾侧角指令控制飞行器飞行;
[0092]
本实施例中,基于步骤s50中得到的攻角指令以及速度倾侧角指令控制飞行器飞行。
[0093]
步骤s70,判断飞行器与目标的接近速度是否大于零,若不大于零,则重复以上所有步骤,直至飞行器与目标的接近速度大于零。
[0094]
本实施例中,接近速度为两个物体的相对速度,计算飞行器与目标的接近速度其中,(v
tx
,v
ty
,v
tz
)为目标在飞行器坐标系下的速度矢量,(v
mx
,v
my
,v
mz
)为飞行器在飞行器坐标系下的速度矢量,当飞行器与目标的接近速度不大于零时,重复步骤s10至步骤s70,直至飞行器与目标的接近速度大于零时,飞行结束。
[0095]
本实施例中,在制导周期起始时刻获取飞行器当前运行参数、飞行器末端期望高度以及末端期望速度,根据所述飞行器末端期望高度以及末端期望速度计算得到规划升力系数,其中,飞行器当前运行参数包括飞行器当前速度、飞行器当前高度,所述末端为飞行
器结束飞行时所处的位置;根据所述飞行器当前速度、飞行器当前高度和规划升力系数计算得到飞行器当前规划阻力系数以及当前规划升阻比;根据所述当前规划阻力系数计算得到平衡滑翔规划弹道倾角;根据所述当前规划升阻比计算得到规划速度倾侧角;根据所述平衡滑翔规划弹道倾角和规划速度倾侧角计算得到攻角指令以及速度倾侧角指令;基于所述攻角指令以及速度倾侧角指令控制飞行器飞行;判断飞行器与目标的接近速度是否大于零,若不大于零,则重复以上所有步骤,直至飞行器与目标的接近速度大于零。通过本实施例,在飞行器满足末端期望经度、末端期望纬度、末端期望高度以及末端期望速度约束时,不需要再进行弹道积分,而是通过解析公式计算出攻角指令以及速度倾侧角指令,计算量小,计算速度快,解决了现有技术中飞行器满足滑翔段末端预设高度以及末端预设速度的约束时,计算量大,计算速度慢,导致不能及时对弹道进行规划并调整飞行策略的问题。
[0096]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0097]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
[0098]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上所述的一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端设备执行本发明各个实施例所述的方法。
[0099]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1