可重复使用高超声速飞行器上升段轨迹优化与制导方法
1.本发明涉及一种可重复使用高超声速飞行器上升段轨迹优化与制导方法。
背景技术:
2.可重复使用高超声速飞行器上升段具有广空域、大速域的特点,其制导方法面临参数不确定性强、气动-推力耦合性强、模型非线性强、干扰复杂等诸多困难,导致其飞行轨迹往往与离线设计偏离较大,传统制导方法适应力不足的问题凸显,而对于上升段轨迹优,常规的优化方法计算时间较长,无法满足在线计算的要求,急需开发新的轨迹优化与制导方法。
技术实现要素:
3.为了克服现有技术的不足,本发明考虑飞行器终点的状态约束以及整个飞行过程的过程约束,提供了一种高效率、高精度的可重复使用高超声速飞行器上升段轨迹优化与制导方法,在得到优化指标对应轨迹的同时满足制导精度。
4.本发明的目的是通过以下技术方案实现的:
5.一种可重复使用高超声速飞行器上升段轨迹优化与制导方法,包括如下步骤:
6.步骤1:在起飞之前,以预定的标准轨迹作为初值,采用凸优化方法进行轨迹优化,得到参考轨迹,作为制导指令;
7.步骤2:在完成首次轨迹优化之后,以凸优化得到的优化控制量作为制导指令,同时添加pd跟踪制导,每个周期内采用凸优化+pd跟踪的制导方式;
8.步骤3:实时判断|x-x
cvx
|<δ,x为状态量,x
cvx
为凸优化得到的优化状态量,δ为状态量偏差要求量,当不等式不满足时,立即重新进行凸优化,否则,到制导周期结束时,再进行凸优化;
9.步骤4:在新凸优化求解时,利用上一次凸优化的结果作为初值,再次优化求解,更新制导指令。
10.相比于现有技术,本发明具有如下优点:
11.本发明应用信赖域系数与罚函数系数自适应调整的方法,能够有效提高在线轨迹优化的求解速度,采用凸优化+pd跟踪的制导方式,能够有效保证制导精度,解决可重复使用高超声速飞行器在线轨迹制导精度低的问题,实现在线高精度轨迹优化与制导。
附图说明
12.图1为凸优化+pd跟踪制导流程图;
13.图2为凸优化求解流程图。
具体实施方式
14.下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本
发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
15.本发明提供了一种可重复使用高超声速飞行器上升段轨迹优化与制导方法,包括如下步骤:
16.步骤1:在起飞之前,以预定的标准轨迹作为初值,采用凸优化方法进行在线凸优化轨迹优化,得到参考轨迹,作为制导指令。
17.本步骤中,如图2所示,在线凸优化轨迹优化包括以下步骤:
18.步骤1.1:初始化轨迹:在第一次凸优化求解时,若初始点与预存的标准弹道初始点偏差不大(偏差判断标准由具体问题确定),则以标准弹道为初始参数,若误差较大,则以初始点与终端点进行线性插值获得初始参数,之后进行凸优化求解时,则以上一次的优化轨迹作为初值;
19.步骤1.2:设置参数:信赖域系数变量{α
n min
,α
n max
}、松弛因子模量容许参数ζ1、线性化容许精度参数ε1、ε2、罚函数系数容许范围{α
ζmin
,α
ζmax
}、动力学收敛精度要求ε、终端约束精度要求ε
xf
,最大迭代次数k
max
;
20.步骤1.3:利用步骤1.1与步骤1.2的相关参数进行凸优化求解,迭代次数k=1;
21.步骤1.4:利用步骤1.3求解出的优化结果判断线性化偏差ei是否满足要求:若线性化偏差ei>ε2,则令信赖域系数变量αn=min{αn/2,α
n min
},并放弃本轮迭代结果,若线性化偏差ei<ε1,则令信赖域系数变量αn=max{αn*2,α
n max
},记录下本次优化结果xk,若线性化偏差ε1<ei<ε2,记录下本次优化结果xk;
22.步骤1.5:若线性化精度满足要求,则进一步判断松弛因子模量ζ,若ζ>ζ1,则令罚函数系数α
ζ
=max{α
ζ
*2,α
ζmax
};
23.步骤1.6:若满足以下收敛条件:
24.(1)动力学偏差e<ε;
25.(2)终端精度误差xf<ε
xf
;
26.凸优化求解结束,输出优化结果,否则置迭代次数k=k+1,重复步骤1.4~步骤1.6继续进行凸优化求解,若k>k
max
,则返回步骤1.3,进行新一轮迭代求解。
27.本步骤中,所求的轨迹优化问题为:
28.min j=f(xk)+α
ζ
ζ
[0029][0030]
其中,j=f(xk)+α
ζ
ζ是优化指标,f(xk)是优化指标函数,ζ是松弛变量,hi为m个等式约束,gj为n个不等式约束。
[0031]
本步骤中,线性化偏差ei定义如下:
[0032][0033]
其中,δi为线性化模型中动力学等式约束求解精度,hi(x)为实际精度,则按计算的
线性化偏差ei∈[0,1],ei越小,线性化模型越精确,针对高速飞行器上升段设置了两个线性化容许精度参数ε1、ε2,0<ε1<ε2<1,若ei>ε2时,认为线性化偏差过大,减小信赖域系数αn,并放弃本轮计算结果,重新求解;若ei<ε1,认为线性化偏差较小,适当增大信赖域系数αn,提高求解速度。
[0034]
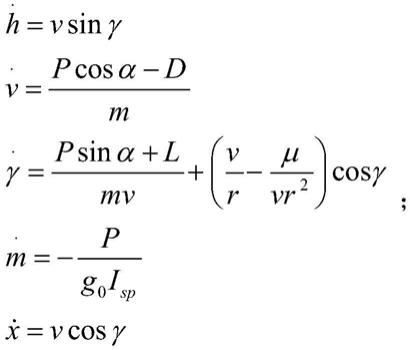
本步骤中,采用的凸优化方法为序列凸化,选取的上升段动力学如下:
[0035][0036][0037][0038][0039][0040]
其中,h、v、γ、p、α、d、m、l、μ、g0、i
sp
、x为高度、速度、弹道倾角、推力、攻角、阻力、质量、升力、引力常数、引力加速度、比冲、射程。
[0041]
在进行序列凸化求解时,需要对动力学模型离散化处理,在此给出针对某一离散阶段的系统动力学方程离散形式如下:
[0042][0043]
其中,t0和tf分别为当前离散阶段内的初始和终端时刻,x(
·
)和u(
·
)分别为当前离散阶段内的离散状态和控制变量矢量,n为当前离散阶段内的配点数量。在本发明范围内,做出规定:为避免变量混淆,省略表示离散阶段的下标,并将所有离散阶段的相同约束统一表示为一个式子;为简便起见,使用符号x表示所有离散状态变量集合,符号u表示所有离散控制变量集合,符号t表示时刻变量集合,并定义
[0044]
对上述离散阶段的系统动力学方程式进行一阶泰勒展开,具体形式为:
[0045][0046]
其中,t:=[t0,tf]
t
为时间变量;上标k表示算法迭代指标,{xk,uk,tk}为线性化近似的参考轨迹,如前所述,在第一次迭代中,其值取为预存的标准轨迹或线性插值给出的初值轨迹,在后续迭代中,其值取为上一次迭代的计算结果;矩阵依据动力学方程右端函数形式,以及相应的状态和控制变量矢量定义,矩阵a(xk,uk)和b(xk,uk)的形式为:
[0047][0048]
矩阵中元素的具体形式如表1所示。在表1中,为书写简洁,令
[0049]
表1
[0050][0051][0052]
其中f为涡轮发动机和冲压发动机产生的推力,i
sp
为对应比冲,f2为火箭发动机产
生的推力,i
sp1
为对应比冲,h0来自指数大气密度模型,h0=7110。
[0053]
矩阵t(xk,uk)的各个元素即为对应的系统动力学右端方程的正值或负值,在此不再赘述。
[0054]
对于离散的动压约束,其泰勒展开一阶线性化形式如下:
[0055][0056]
其中,c
11
=ρv,c
12
=-ρv2/(2h0)。
[0057]
步骤2:在完成首次轨迹优化之后,以凸优化得到的优化控制量作为制导指令,同时添加pd跟踪制导,采用组合制导的方式,每个周期内采用凸优化+pd跟踪的制导方式。如图1所示,具体实施步骤如下:飞行器在飞行过程中,受到外界干扰,飞行轨迹偏离预定的标称轨迹,外环由测量元件测出飞行器当前状态量,根据任务指标,利用凸优化,从当前状态点优化出一条新的飞行轨迹,内环,在凸优化给出新的标准轨迹的基础上,采用pd跟踪的方式,对飞行器状态量进一步跟踪制导,保证在误差的干扰下,飞行器能够完成预定任务。
[0058]
步骤3:实时判断|x-x
cvx
|<δ,x为状态量,x
cvx
为凸优化得到的优化状态量,δ为状态量偏差要求量,当不等式不满足时,立即重新进行凸优化,否则,到制导周期结束时,再进行凸优化。
[0059]
步骤4:在新凸优化求解时,利用上一次凸优化的结果作为初值,再次优化求解,更新制导指令。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1