一种路边单元与智能网联汽车计算任务分配方法与流程
1.本发明属于移动边缘计算领域,涉及路边单元和智能网联汽车的计算任务分配技术,具体是一种路边单元与智能网联汽车计算任务分配方法。
背景技术:
2.移动边缘计算技术通过无线接入轻量级计算服务器的方式来为其覆盖区域中的移动设备提供计算服务,从而降低服务时延,提升网络效能;移动边缘计算是智能驾驶网络中重要的一环。
3.现有技术中智能网联汽车在行驶过程中会通过车载传感器采集数据进行分析,再结合路侧单元提供的数据做出决策以控制车辆安全平稳运行;现有技术中路侧单元在进行数据处理时,只考虑了现有任务的处理,没有对任务处理能力进行动态预留,导致智能网联汽车和路侧单元的数据交互产生时延,无法保证智能网联汽车的安全运行;因此,亟需一种路边单元和智能网联汽车的计算任务分配方法。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一;为此,本发明提出了一种路边单元与智能网联汽车计算任务分配方法,用于解决现有技术中路侧单元在进行任务处理时,没有动态预留动态处理能力,导致智能网联汽车和路侧单元的数据交互产生时延,无法保证智能网联汽车安全运行的技术问题,本发明通过智能网联汽车获取任务信息,云平台根据任务信息选取目标路侧单元,通过车辆预测轨迹对目标路侧单元的预留处理能力进行动态调整解决了上述问题。
5.为实现上述目的,根据本发明的第一方面的实施例提出一种路边单元与智能网联汽车计算任务分配方法,包括:
6.智能网联汽车生成并筛选任务请求,将筛选之后的任务请求和车辆信息进行整合生成任务信息,并将任务信息发送至云平台;
7.云平台根据任务信息和车辆预测轨迹获取目标路侧单元,将任务信息和车辆预测轨迹整合发送至目标路侧单元;其中,云平台和目标路侧单元通信连接;
8.目标路侧单元分析任务信息需求的处理能力,并结合车辆预测轨迹对目标路侧单元的预留处理能力进行动态调整。
9.优选的,智能网联汽车获取所述任务请求之后,需要对任务请求进行筛选,包括:
10.智能网联汽车对任务请求进行分析,当通过智能网联汽车不能完成任务请求时,将该任务请求筛选出来,与车辆信息整合生成任务信息;否则,通过智能网联汽车处理该任务请求。
11.优选的,所述车辆预测轨迹通过智能网联汽车获取,或者通过云平台生成。
12.优选的,通过智能网联汽车获取所述车辆预测轨迹,包括:
13.提取智能网联汽车的导航任务,根据导航任务提取智能网联汽车的车辆预测轨
迹,并将车辆预测轨迹发送至云平台。
14.优选的,通过云平台生成所述车辆预测轨迹,包括:
15.通过路侧单元获取智能网联汽车的历史轨迹;
16.车道方向结合车辆信息获取车辆预测轨迹,并将车辆预测轨迹发送至云平台。
17.优选的,云平台对路侧单元进行筛选获取目标路侧单元,包括:
18.通过云平台获取路侧单元筛选的距离阈值;
19.车辆预测轨迹结合距离阈值选取路侧单元,并标记为目标路侧单元。
20.优选的,所述距离阈值为两个路侧单元相隔车道距离一半的整数倍,或者
21.为根据智能网联汽车的车辆信息获取的刹车距离。
22.优选的,目标路侧单元分析所述任务信息,获取需要的处理能力,包括:
23.提取任务信息中任务请求需要处理的数据总量;
24.结合目标路侧单元的配置,估算数据总量对应的处理能力。
25.优选的,根据所述处理能力设定目标路侧单元预留处理能力,包括:
26.将目标路侧单元标记为i,同时获取目标路侧单元与智能网联汽车的车道总长,并标记为czi;其中,i为大于0的整数;
27.车道总长结合车辆速度获取预留处理时间ysi;其中,预留处理时间动态获取;
28.获取目标路侧单元的单位处理能力,结合预留处理时间ysi为目标路侧单元i设定对应的预留处理能力。
29.与现有技术相比,本发明的有益效果是:
30.本发明通过筛选智能网联汽车的任务请求,并结合车辆信息整合生成任务信息,再通过云平台根据任务信息和车辆预测轨迹选取目标路侧单元,最后目标路侧单元分析任务信息需求的处理能力,并结合车辆预测轨迹对目标路侧单元的预留处理能力进行动态调整,保证任务请求能够及时处理;解决了智能网联汽车和路侧单元数据交互产生的时延问题,能够提高智能网联汽车的安全平稳运行。
附图说明
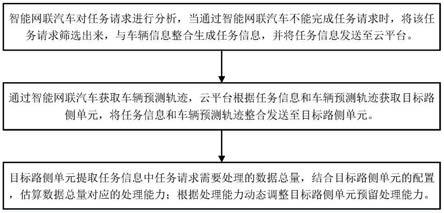
31.图1为本发明的工作步骤示意图。
具体实施方式
32.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
33.现有技术中智能网联汽车在行驶过程中会通过车载传感器采集数据进行分析,或者将采集的数据通过路侧单元进行分析,获取决策信息,根据决策信息控制车辆安全平稳运行;现有技术一般结合路侧单元对其覆盖范围内的智能网联汽车进行辅助,其他暂不相关的路侧单元则不会提前进入准备状态,这种情况容易导致智能网联汽车在进入下一个路侧单元覆盖范围时产生网络时延,无法保证数据的及时处理,也就无法保证智能网联汽车的安全运行。
34.本技术通过智能网联汽车获取任务信息,云平台根据任务信息选取目标路侧单元,通过车辆预测轨迹对目标路侧单元的预留处理能力进行动态调整以解决上述问题。
35.请参阅图1,本技术提供了一种路边单元与智能网联汽车计算任务分配方法,包括:
36.智能网联汽车生成并筛选任务请求,将筛选之后的任务请求和车辆信息进行整合生成任务信息,并将任务信息发送至云平台;
37.云平台根据任务信息和车辆预测轨迹获取目标路侧单元,将任务信息和车辆预测轨迹整合发送至目标路侧单元;
38.目标路侧单元分析任务信息需求的处理能力,并结合车辆预测轨迹对目标路侧单元的预留处理能力进行动态调整。
39.可以理解的是,本技术中云平台和目标路侧单元通信连接;云平台的作用相当于中央控制器,路侧单元相当于边缘计算设备,通过云平台控制路侧单元进行协作;目标路侧单元是经过路侧单元筛选出来的,因此本技术中云平台与所有路侧单元均通信连接。
40.智能网联汽车是指车联网和智能车的有机联合,是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、路、后台等智能信息交换共享,实现安全、舒适、节能、高效行驶,并最终可替代人来操作的新一代汽车。
41.车辆信息中包含能够辅助完成任务的数据,如车辆当前位置、车辆车型等数据,根据任务请求整合不同的车辆信息;举例来说,判定车辆是否会与车道上的行人发生碰撞时,则需要的车辆信息至少包括车辆速度和车辆当前位置。
42.在一个实施例中,智能网联汽车获取任务请求之后,需要对任务请求进行筛选,包括:
43.智能网联汽车对任务请求进行分析,当通过智能网联汽车不能完成任务请求时,将该任务请求筛选出来,与车辆信息整合生成任务信息;否则,通过智能网联汽车处理该任务请求。
44.本实施例中技术方案的主要目的是对智能网联汽车生成的任务请求进行筛选,将智能网联汽车本身能够处理的任务请求截留下来,通过智能网联汽车进行任务处理;同时,筛选出智能网联汽车无法进行处理或者处理能力不够的任务请求,发送云平台,再发送至路侧单元进行任务处理;举例来说,当任务请求为获取车内温度时,则智能网联汽车本身就可以处理,但当任务请求为获取车辆预测轨迹的拥堵程度时,则智能网联汽车本身就无法完成该任务的处理,因此需要借助路侧单元进行处理。
45.在一个实施例中,车辆预测轨迹通过智能网联汽车获取,或者通过云平台生成;通过智能网联汽车获取具体是指,提取智能网联汽车的导航任务,根据导航任务提取智能网联汽车的车辆预测轨迹,并将车辆预测轨迹发送至云平台。
46.导航任务通过高德地图、百度地图、腾讯地图等地图软件设置,一个导航任务会包含多条路径,本技术提取车主选择的路径作为车辆预测路径;在另外一些优选的实施例中,也可将地图软件推荐的多条路径均作为车辆预测路径。
47.在一个具体的实施例中,通过云平台生成车辆预测轨迹,包括:
48.通过路侧单元获取智能网联汽车的历史轨迹;车道方向结合车辆信息获取车辆预测轨迹,并将车辆预测轨迹发送至云平台。
49.本实施例中的车辆轨迹预测实质是结合车道方向获取智能网联汽车下一步路径,如处于t型路口的智能网联汽车接下来有两个行驶方向,则这两个行驶方向均可作为车辆预测轨迹;在另外一些优选的实施例中,还可结合现有技术如基于马尔可夫链的轨迹预测等选取多条路径中的一条作为车辆预测路径。
50.在一个实施例中,云平台对路侧单元进行筛选获取目标路侧单元,包括:
51.通过云平台获取路侧单元筛选的距离阈值,车辆预测轨迹结合距离阈值选取路侧单元,并标记为目标路侧单元。
52.本实施例中技术方案的目的是筛选出会与智能网联汽车产生数据交互的路侧单元,因此车辆预测轨迹结合距离阈值即可筛选出目标路侧单元。
53.本实施例中的距离阈值是一个非常重要的参数,距离阈值为两个路侧单元相隔车道距离一半的整数倍,或者为根据智能网联汽车的车辆信息获取的刹车距离。
54.车道距离即为沿着车道计量获取的两个路侧单元之间的距离,任意相邻两个路侧单元的车道距离可能不一致,可以选取车辆距离的平均值作为参考;车道距离一半的整数倍即设置合适的整数倍率,即可得到至少一个路侧单元,也就是说在车辆预测轨迹上的路侧单元会有部分会被筛选出来作为目标路侧单元;可以理解的是,刹车距离和车道距离的作用一致。
55.在一个实施例中,目标路侧单元分析任务信息,获取需要的处理能力,包括:
56.提取任务信息中任务请求需要处理的数据总量,结合目标路侧单元的配置,估算数据总量对应的处理能力。
57.本实施例中,首先提取任务请求,并分析该任务请求对应需要处理的数据总量,再结合目标路侧单元的配置,可以得到处理完这些数据需要的处理能力,为下一步奠定数据基础。
58.在一个具体的实施例中,根据处理能力设定目标路侧单元预留处理能力,包括:
59.将目标路侧单元标记为i,同时获取目标路侧单元与智能网联汽车的车道总长,并标记为czi;
60.车道总长结合车辆速度获取预留处理时间ysi;获取目标路侧单元的单位处理能力,结合预留处理时间ysi为目标路侧单元i设定对应的预留处理能力。
61.本实施例中,对目标路侧单元的标注顺序按照与智能网联汽车位置由近到远进行标注,即在车辆预测轨迹上,智能网联汽车前进方向上与之距离最小的目标路侧单元标记为1;根据实际需要,也可以将当前智能网联汽车进行数据交互的目标路侧单元标记为1。
62.单位处理能力表示单位时间内目标路侧单元所能处理的数据量;单位处理能力结合计算获取的预留处理时间可以获取目标路侧单元需要预留的数据处理能力,即预留处理能力。
63.值得注意的是,预留处理能力是动态的,即在单位时间内可以随时变化;目标处理能力根据预留处理能力进行任务的卸载,保证能够及时处理即将到来的智能网联汽车的数据。
64.上述公式中的部分数据均是去除量纲取其数值计算,公式是由采集的大量数据经过软件模拟得到最接近真实情况的一个公式;公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者通过大量数据模拟获得。
65.本发明的工作原理:
66.智能网联汽车对任务请求进行分析,当通过智能网联汽车不能完成任务请求时,将该任务请求筛选出来,与车辆信息整合生成任务信息,并将任务信息发送至云平台。
67.通过智能网联汽车获取车辆预测轨迹,云平台根据任务信息和车辆预测轨迹获取目标路侧单元,将任务信息和车辆预测轨迹整合发送至目标路侧单元。
68.目标路侧单元提取任务信息中任务请求需要处理的数据总量,结合目标路侧单元的配置,估算数据总量对应的处理能力;根据处理能力动态调整目标路侧单元预留处理能力。
69.以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1