一种变轴距机器人底盘的动态控制方法与流程
1.本发明涉及机器人控制技术技术领域,具体为一种变轴距机器人底盘的动态控制方法。
背景技术:
2.机器人(robot)是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,但是现有机器人底盘的轴距都是固定不变的,只能运行在相对较平坦的路面,难以适应复杂路面,为了适应不同的路面环境,机器人底盘的轴距会动态改变,为此我们提出一种变轴距机器人底盘的动态控制方法。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种变轴距机器人底盘的动态控制方法,根据机器人的目标姿态以及运行速度,获取当前的状态误差,利用计算模块得到底盘每条摇臂的空间位置,再使用摇臂运动学模块完成关节空间与欧氏空间的相互变换,配合移动机器人逆运动学模块与正运动学模块,完成底盘空间速度到驱动轮空间的变换以及驱动轮空间速度到底盘空间的变换,利用驱动关节与电机,完成控制指令的执行,使得机器人底盘的轴距动态改变,能够让机器人底盘适应不同的路面环境,保证机器人的稳定性,本发明提供如下技术方案:
4.一种变轴距机器人底盘的动态控制方法,其特征在于:具体方法步骤如下:
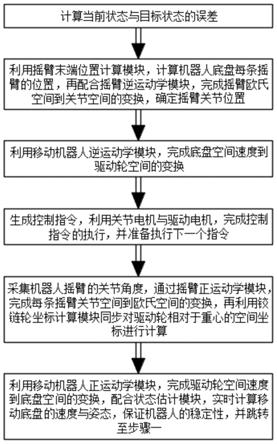
5.步骤一、计算当前状态与目标状态的误差;
6.步骤二、利用摇臂末端位置计算模块,计算机器人底盘每条摇臂的位置,再配合摇臂逆运动学模块,完成摇臂欧氏空间到关节空间的变换,确定摇臂关节位置;
7.步骤三、利用移动机器人逆运动学模块,完成底盘空间速度到驱动轮空间的变换,其公式如下:
[0008][0009]
其中:vc为轮速,γ为驱动轮转向角和摇臂关节角度,为底盘空间速度,和为科里奥利方程矩阵;
[0010]
步骤四、生成控制指令,利用关节电机与驱动电机,完成控制指令的执行,并准备执行下一个指令;
[0011]
步骤五、采集机器人摇臂的关节角度,通过摇臂正运动学模块,完成每条摇臂关节空间到欧氏空间的变换,再利用铰链轮坐标计算模块同步对驱动轮相对于重心的空间坐标进行计算,并实时同步计算和
[0012]
步骤六、利用移动机器人正运动学模块,完成驱动轮空间速度到底盘空间的变换,配合状态估计模块,实时计算移动底盘的速度与姿态,保证机器人的稳定性,并跳转至步骤
一。
[0013]
优选的,所述控制方法采用闭环反馈控制方法。
[0014]
优选的,所述底盘采用四轮独立转向底盘,且每个轮子采用主动悬挂。
[0015]
优选的,所述摇臂逆运动学模块的作用为完成每条摇臂欧氏空间到关节空间的变换,所述移动机器人逆运动学模块的作用为完成底盘空间速度到驱动轮空间的变换。
[0016]
优选的,所述摇臂正运动学模块的作用为完成每条摇臂关节空间到欧氏空间的变换,为摇臂逆运动学的反解,所述移动机器人正运动学模块的作用为完成轮空间速度到底盘空间的变换,为移动机器人逆运动学的反解。
[0017]
与现有技术相比,本发明提供了一种变轴距机器人底盘的动态控制方法,具备以下有益效果:
[0018]
本发明提供了一种变轴距机器人底盘的动态控制方法,根据机器人的目标姿态以及运行速度,获取当前的状态误差,利用计算模块得到底盘每条摇臂的空间位置,再使用摇臂运动学模块完成关节空间与欧氏空间的相互变换,配合移动机器人逆运动学模块与正运动学模块,完成底盘空间速度到驱动轮空间的变换以及驱动轮空间速度到底盘空间的变换,利用关节电机与驱动电机,完成控制指令的执行,使得机器人底盘的轴距动态改变,能够让机器人底盘适应不同的路面环境,保证机器人的稳定性。
附图说明
[0019]
图1为本发明一种变轴距机器人底盘的动态控制方法的流程图;
[0020]
图2为本发明一种变轴距机器人底盘的动态控制方法的系统原理图。
具体实施方式
[0021]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0022]
请参阅图1-2,一种变轴距机器人底盘的动态控制方法,具体方法步骤如下:
[0023]
一种变轴距机器人底盘的动态控制方法,其特征在于:具体方法步骤如下:
[0024]
步骤一、计算当前状态与目标状态的误差;
[0025]
步骤二、利用摇臂末端位置计算模块,计算机器人底盘每条摇臂的位置,再配合摇臂逆运动学模块,完成摇臂欧氏空间到关节空间的变换,确定摇臂关节位置;
[0026]
步骤三、利用移动机器人逆运动学模块,完成底盘空间速度到驱动轮空间的变换,其公式如下:
[0027][0028]
其中:vc为轮速,γ为驱动轮转向角和摇臂关节角度,为底盘空间速度,和为科里奥利方程矩阵;
[0029]
步骤四、生成控制指令,利用关节电机与驱动电机,完成控制指令的执行,并准备执行下一个指令;
[0030]
步骤五、采集机器人摇臂的关节角度,通过摇臂正运动学模块,完成每条摇臂关节空间到欧氏空间的变换,再利用铰链轮坐标计算模块同步对驱动轮相对于重心的空间坐标进行计算,并实时同步计算和
[0031]
步骤六、利用移动机器人正运动学模块,完成驱动轮空间速度到底盘空间的变换,配合状态估计模块,实时计算移动底盘的速度与姿态,保证机器人的稳定性,并跳转至步骤一。
[0032]
进一步的,所述控制方法采用闭环反馈控制方法。
[0033]
进一步的,所述底盘采用四轮独立转向底盘,且每个轮子采用主动悬挂。
[0034]
进一步的,所述摇臂逆运动学模块的作用为完成每条摇臂欧氏空间到关节空间的变换,所述移动机器人逆运动学模块的作用为完成底盘空间速度到驱动轮空间的变换。
[0035]
进一步的,所述摇臂正运动学模块的作用为完成每条摇臂关节空间到欧氏空间的变换,为摇臂逆运动学的反解,所述移动机器人正运动学模块的作用为完成轮空间速度到底盘空间的变换,为移动机器人逆运动学的反解。
[0036]
工作时,使用者先获取机器人的目标姿态以及运行速度,然后再根据机器人的当前姿态以及运行速度,获取状态误差,并利用机器人底盘摇臂末端位置计算模块,计算每条摇臂的空间位置,配合摇臂逆运动学模块,完成摇臂欧氏空间到关节空间的变换,确定摇臂关节位置,同时利用底盘空间速度与驱动轮转向角的对应关系,配合移动机器人逆运动学模块,利用计算公式获得底盘空间速度到驱动轮空间的变换,利用关节电机与驱动电机,根据计算数据完成控制指令的执行,完成底盘轴距及速度的控制,再根据机器人的当前姿态以及运行速度,通过摇臂正运动学模块,将机器人底盘的每条摇臂关节空间变换为欧氏空间,再利用铰链轮坐标计算模块同步对驱动轮相对于重心的空间坐标进行计算,并实时同步计算和最后再利用移动机器人正运动学模块,完成驱动轮空间速度到底盘空间的变换,进而完成机器人底盘轴距的反馈与底盘状态估计,使用闭环反馈控制器实时调整轴距及速度,让机器人适应不同的路面环境,保证机器人的稳定性。
[0037]
综上所述,本发明提供了一种变轴距机器人底盘的动态控制方法,根据机器人的目标姿态以及运行速度,获取当前的状态误差,利用计算模块得到底盘每条摇臂的空间位置,再使用摇臂运动学模块完成关节空间与欧氏空间的相互变换,配合移动机器人逆运动学模块与正运动学模块,完成底盘空间速度到驱动轮空间的变换以及驱动轮空间速度到底盘空间的变换,利用关节电机与驱动电机,完成控制指令的执行,使得机器人底盘的轴距动态改变,能够让机器人适应不同的路面环境。
[0038]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0039]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1