一种高敏捷性空空导弹大迎角非常规飞行控制技术
1.本发明涉及航空航天领域,具体涉及一种高敏捷性空空导弹大迎角非常规飞行控制技术。
背景技术:
2.空空导弹经过多年的发展,已经由需要追击敌机尾部的定轴发射,到可实现小离轴角发射,再到现已经实现的全向打击能力,即以本机为中心,有打击包括后半球的任何角度敌机的能力。目前空空导弹发射主要分为三个阶段,分别是初制导,中制导,末制导。在初制导过程中需要将导弹轴线和速度方向迅速转移到目标线附近,以满足末制导方法进行导引。为打击后半球目标,前射导弹初制导都需要经过一个快速转弯掉头的过程,这一过程就是越肩发射导弹的敏捷转弯过程。这个过程可以通过一个过失速机动来实现,也就是在短时间内迅速拉大迎角,然后沿速度轴滚转,接近完成掉头后再减小速度滚转角和迎角,机动过程如图1。其中导弹拉升到大迎角,是为了进行减速,减小转弯半径。在整个机动过程中,都需要维持侧滑角为零,这时也就需要额外的偏航力矩进对侧滑角进行消除。但是在大迎角下,存在很大的流动分离,导致气动舵面的控制效率大大降低。此时就需要其他控制方法实现大迎角下的飞行控制。
3.现有的控制方法是采用矢量推力与气动舵面的复合控制,或者直接力与气动舵面的复合控制提供偏航力矩来消除侧滑角。对于矢量推力来说,是尾喷口结构复杂化,发动机的偏角有限,偏转后会减少航程。并且目前有许多矢量发动机是二维矢量发动机,无法提供偏航力矩。直接力控制方法会增大导弹质量与体积,不符合空空导弹尽可能减小体积的要求,并且直接力喷口温度很高,对导弹表面材料有更高的要求。
4.介于以上的问题,本发明提出了另一种控制方法,使用前体涡进行控制提供偏航力矩。所谓前体涡控制就是利用主动控制前体分离涡的不对称性,形成一个高位涡一个低位涡,其中低位涡会产生一个低压区,高位涡产生一个高压区,形成压差,产生侧向力和偏航力矩,其原理示意图如图2、图3所示。本发明的原理基础是大迎角空气动力学,由于现代导弹的飞行速度很高,为减小阻力,空空导弹往往都设计成细长旋成体。在大迎角下细长旋成体的前体背风处会出现一对分离涡。在此基础上,通过激励器对前体涡进行主动控制,控制前体涡出现非对称构型,诱导出侧向力,由于导弹前体距离导弹质心很远,所以前体产生的侧向力会产生足够的控制力矩。在相同的吹气量下,前体涡控制可产生比射流吹气本身的推力大三个数量级的控制力及控制力矩。通过该方法对大迎角下的空空导弹进行控制是一种非常高效的方法。
技术实现要素:
5.1:前体涡控制系统组成:
6.本发明是一种在导弹大迎角飞行完成敏捷转弯时,自动判断侧滑角,然后根据侧滑角控制激励器,构造非对称前体涡,诱导出偏航控制力矩,自动消除侧滑角的系统。当飞
行需要侧滑角时,也可以使前体涡控制系统主动产生控制偏航力矩。
7.整体的方法流程如图4所示,其中上支线由主控制器和主控制效应器组成了导弹的主飞行控制系统,下支线由侧滑角检测模块,控制增益模块,前体涡控制激励器模块组成了前体涡控制系统。图4中菱形方块为一个判断模块,当飞行不需要侧滑角时,由向下支线的控制增益装置提供给合成射流装置控制信号,当飞行需要侧滑角或需要主动提供偏航力矩时,由主控制器提供给前体涡控制激励器控制信号。
8.在进行不需要侧滑角的机动时,前体涡控制系统与飞机主控制系统彼此分离,不会增加主控制系统的复杂程度。在主飞行控制系统中,可使侧滑角默认为零,这样可以对主飞行控制系统进行一个简化。主控制系统为导弹提供除消除侧滑外正常控制所需的控制力矩,前体涡控制系统负责消除侧滑。在飞行过程中,由侧滑角检测模块检测侧滑角,将侧滑角信号传递给控制增益模块转换为控制信号,传递给前体涡控制激励器,使前体涡控制激励器产生相反方向的偏航力矩。具体分为三种情况:
9.当无侧滑时β=0,激励器不工作,左右前体涡对称,不产生侧向力,不产生偏航力矩。侧滑角维持不变。
10.当右侧滑时β>0,使激励器产生非对称涡型,使左侧为低位涡右侧为高位涡,产生y轴正方向侧向力,产生z轴正方向偏航力矩。消除右侧滑。
11.当左侧滑时β<0,使激励器产生非对称涡型,使左侧为高位涡右侧为低位涡,产生y轴负方向侧向力,产生z轴负方向偏航力矩。消除左侧滑。
12.在进行需要侧滑角的机动或需要主动提供偏航力矩时,由主控制器直接提供给前体涡控制激励器控制信号,将前体分离涡的控制器与其他控制效应器进行联合控制,就与常规飞行控制方式相同,将在实例部分中展示,这里不做过多介绍。
13.图4所示的控制方法,也就是本发明的高敏捷性空空导弹大迎角非常规飞行控制方法。
14.2:应用实例:
15.2.1:应用实例综述:
16.为更加清晰的介绍本方法,并且证明此方法真实可用,建立了图7几何模型的图4形式的动力学仿真模型作为实例,对此建立好的动力学仿真模型进行herbst机动的仿真,查看可否在图4所示的控制方法下完成herbst机动的仿真完成敏捷转弯。
17.第二节中所有内容都属于应用实例部分,其中的算法公式不是本发明内容,只是本发明的实例,和证明本方法有效。实际应用中可替换。
18.2.2:前体涡控制激励器的建立:
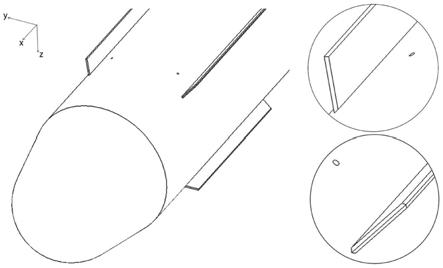
19.其中前体涡控制激励器模块是通过在导弹前体背风处设立一对沿纵对称面对称的吹气孔,其轴向位置为前体涡出现的起始位置,周向位置为背风纵对称面附近(
±
45到
±
30之间),如图6所示。利用合成射流对空空导弹前体涡进行控制,在控制时通过改变吹气孔吹气动量的大小,改变单侧前体涡与导弹表面的距离,使吹气一侧的前体涡由低位涡变为高位涡,与未吹气一侧的地位涡形成压差,产生侧向力与偏航力矩,达到控制偏航力矩完成导弹敏捷转弯的目的。
20.定义吹气孔的吹气动量为
[0021][0022]
其中uj为微量吹气孔的出口速度,sj为微量吹气孔的面积,u
∞
为来流风速,d为细长体直径。定义右侧孔吹气动量为正左侧孔吹气动量为负。右侧孔即为体轴系下y轴负方向的孔。总吹气动量如下所示
[0023]cμ
=c
μ-right-c
μ-left
ꢀꢀꢀ
(2)
[0024]
导弹当前的侧滑角会决定吹气大小,而吹气动量的大小会影响前体涡的位置,共有三种情况,其中k为增益。
[0025]
当无侧滑时β=0,c
μ
=kβ=0,无吹气孔吹气,左右前体涡对称,不产生侧向力,不产生偏航力矩。侧滑角维持不变。
[0026]
当右侧滑时β>0,c
μ
=kβ>0,右侧吹气孔吹气,左侧为低位涡右侧为高位涡,产生y轴正方向侧向力,产生z轴正方向偏航力矩。消除右侧滑。
[0027]
当左侧滑时β<0,c
μ
=kβ<0,左侧吹气孔吹气,左侧为高位涡右侧为低位涡,产生y轴负方向侧向力,产生z轴负方向偏航力矩。消除左侧滑。
[0028]
2.3:应用实例导弹动力学模型的建立:
[0029]
图4中的导弹模块由一个气动力模型和动力学模型组成。其中气动力模型同过cfd数值计算得到不同飞行状态和控制量输入情况下导弹的受力和力矩情况。然后再对得到的气动数据进行建模,建模方法使用径向基神经网络建模。气动力影响因素如公式3所示:
[0030]ci
=ci(α,β,δ
y+
,δ
y-,δ
z+
,δ
z-,cu,p,q,r) i=x,y,z,l,m,n
ꢀꢀꢀ
(3)
[0031]
其中,自变量依次为,迎角,侧滑角,y轴正方向升降舵偏角,y轴负方向升降舵偏角,z轴正方向方向舵偏角,z轴负方向方向舵偏角,吹气动量(本文中需要研究的控制方法),滚转角速度,俯仰角速度,偏航角速度。因变量依次为轴向力系数,侧向力系数,法向力系数。然后将其分为静态部分和动态部分如公式5。静态部分直接通过cfd数值计算测量然后利用径向基神经网络建模,动态部分先采用kalviste方法分解如公式6,其中p
mod q
mod r
mod
分别为分解后的沿体轴系的x,y,z轴的角速度,ω
ss
为分解后的沿速度矢量的角速度。然后利用cfd进行动态的数值计算,分别进行沿三个轴震动和沿速度轴滚转的数值计算,分别得到公式6中等号右侧每一部分的数值。得到气动数据库,最终利用神经网络建模拟合该等式。最终得到在不同飞行状态下,导弹的力系数和力矩系数。
[0032]ci
=c
istatic
(α,β,δ
y+
,δ
y-,δ
z+
,δ
z-,cu)+c
idynamic
(α,β,p,q,r)
ꢀꢀꢀ
(5)
[0033][0034]
动力学模型由导弹的全量运动方程组建立,如公式8所示。其中,x,y,z为气动力在飞机机体系的分量,坐标系选为美式坐标系。l,m,n为飞机气动力矩在机体上的分量。由公式7计算。
[0035][0036]
其中1/2ρv2为动压,s为飞机的机翼面积,b为翼展,为平均气动弦长。
[0037][0038]
其中φ,θ,ψ分别为飞行器的偏航角,俯仰角,滚转角;u,v,w分别为体轴系下沿x,y,z轴的速度;p,q,r分别为体轴系下沿x,y,z轴的角速度;xv,yv,zv为地面坐标系下的位置;m,g分别为质量220kg和重力加速度9.8n/s2;i
x
,iy,iz分别为沿三个轴的惯性矩,分别为0.788m4,163.607m4,163.607m4;i
xz
为惯性积,由于该导弹轴对称,所以惯性积为零。整个方程组满足无自转,平地球,具有对称面飞行器的假设。
[0039]
将上述公式进行积分,即可得到导弹在不同气动力气动力矩下的飞行状态。至此即完成了导弹仿真模型的建立,在确定初值和控制量的情况下,导弹的飞行状态完全已知。
[0040]
2.4:应用实例主控制系统的建立
[0041]
图4中主控制效应器是导弹的四个尾翼舵面和提供俯仰力矩和滚转力矩的矢量发动机组成。主控制器由动态逆控制系统和基序列控制分配算法组成。
[0042]
其中动态逆控制算法是通过所期望的迎角,侧滑角,速度滚转角求得所期望的控制力矩,需要分成两步。首先通过姿态输入,求出期望的角速度,在根据期望的角速度,求出期望的控制力矩。
[0043]
根据微分方程:
[0044][0045]
其中[f
x
,fy,fz]
t
为风轴系下各轴的受力,v为和速度。
[0046]
其中,迎角,侧滑角,速度滚转角的导数可由如下方式确定:
[0047][0048]
其中[k
α
,k
β
,k
μ
]
t
需要根据实际情况确定,在本文中取[5,0,5]
t
,其中因为期望的侧滑角默认为零,并且真实飞行状态的侧滑角由前体涡控制系统消除,所以此处默认真实飞行状态的侧滑角也为零,自然两个零之间的差值也为零,所以k
β
=0。
[0049]
当需要侧滑角或需要主动提供偏航力矩时k
β
≠0,根据实际情况确定。
[0050]
对微分方程进行转化,可求得期望的角速度:
[0051][0052]
根据转动动力学微分方程,经过转化可得到期望的控制力矩:
[0053][0054]
其中期望的角速度导数为:
[0055][0056]
其中[k
p
,kq,kr]
t
=[2,2,2]。具体系数需要根据实际情况确定,此时即可得到期望的力矩,这里求出的力矩是期望的飞行器所受的合力矩,并不是所需的控制力矩,所以需要将当前导弹非控制所产生的力矩减掉,非控制力矩[lb,mb,nb]
t
包括,弹体,弹翼,气流干扰等产生的力矩。所以所需的控制力矩为:
[0057][0058]
至此,已经根据期望的姿态求得了所需的控制力矩。
[0059]
在本实例中,主控制效应器控制方式分别有气动舵面,矢量发动机两种方式。但是在飞行当中,由于矢量发动机偏转燃油消耗大,所以控制的先后顺序是,先使用气动舵面和前体涡,如果这两种控制方式不能达到所需的控制力矩,这时启用矢量发动机。如下公式:
[0060]
yc=y
c1
+y
c2
ꢀꢀꢀ
(15)
[0061]
其中yc为上一节所求出的所需的控制力矩[l
ec
,m
ec
,n
ec
]
t
,y
c1
为前体涡和气动舵面产生的控制力矩,y
c2
是矢量发动机产生的控制力矩。通常情况下,y
c2
为零。
[0062]
已知所需的控制力矩之后,还需要求出各控制效应器的开度,来产生所需的控制力矩,也就是求解如下方程:
[0063][0064]
其中y
c1
=[l
ec1
,m
ec1
,n
ec1
]
t
,b为控制效率矩阵,u为控制效应器的开度向量,在本文中u=[δ
y+
,δ
y-,δ
z+
,δ
z-]
t
,等式右端分别为,y轴正方向的尾翼偏角,y轴负方向的尾翼偏角,z轴正方向的尾翼偏角,z轴负方向的尾翼偏角。
[0065]
当需要主动提供偏航力矩时还需要添加吹气动量u=[δ
y+
,δ
y-,δ
z+
,δ
z-,cu]
t
。u
min
,u
max
分别是各控制效应器的上下限,在本实例中四个尾翼偏角的上下限为正负25度。
[0066]
导弹由尾翼由四个舵面构成,共有四个变量,需要主动提供偏航力矩时是五个。而期望的控制力矩只有三个方向,所以控制效应器是冗余的,也就是公式中u的维数是大于大于y
c1
的维数,所以方程可能是多解的,在加入控制效应器的上下限限制后,方程又可能是无解的。所以需要附加条件和控制分配算法,以求得在已知所需控制力矩的情况下,各控制效应器的开度情况。这里采用基序列分配的方法,该方法较为复杂也并不是本发明的重点,具体可参考文献calibration and compensation of near-field scan measurements,在这里不做赘述。
[0067]
至此便完成了主控制效应器和主控制器的选择与建立。
[0068]
2.5:应用实例仿真结果
[0069]
至此,便完成了图4所示整体导弹仿真模型的所有模块的建立。
[0070]
在此模型下,确定初值和目标飞行状态即可完全确定导弹的飞行状态。其中初值选择如下:
[0071]
目标飞行状态为一个过失速机动,主要为三个部分,分别是拉大迎角,沿速度轴滚转,当航迹方位角接近180度时降低迎角和速度滚转角,回到平飞状态,完成掉头。如图8是控制输入所示,图9是仿真结果。
[0072]
由仿真结果可以看出,侧滑角被控制在1.5度以内,完成了过失速机动。在主控制系统中侧滑角默认为零,前体涡控制系统独立于主控制系统,导弹完成越肩发射第一阶段的敏捷转弯的情况下,前体涡控制系统是可以提供足够并准确的偏航力矩来消除侧滑角的。
[0073]
3:本发明与现有方法相比具有以下优势:
[0074]
(1)产生相同偏航力矩的情况下,前体涡控制系统的结构和质量要比直接力和矢量发动机小很多。
[0075]
(2)在不需要侧滑角的机动中,前体涡控制系统可自动消除侧滑,独立于导弹的总控制系统之外,起到单独工作的目的,所以不会增加总控制算法的复杂程度。
[0076]
(3)在需要侧滑角的机动中,前体涡的控制系统也可以主动提供偏航力矩,与其他控制效应器效果叠加,起到增大控制力矩的效果。
附图说明
[0077]
图1herbst机动示意图
[0078]
图2主动控制产生非对称前体涡示意图
[0079]
图3主动控制产生非对称前体涡三维示意图
[0080]
图4高敏捷性空空导弹大迎角非常规飞行控制方法流程图
[0081]
图5前体涡控制系统流程图
[0082]
图6吹气孔位置示意图
[0083]
图7仿真模型的几何模型图
[0084]
图8飞行仿真实例控制输入
[0085]
图9飞行仿真实例结果
具体实施方式
[0086]
本发明可以依照以下实施方法实施:
[0087]
1、首先对敏捷导弹大迎角情况进行风洞实验或数值计算,确定前体涡位置,在前体涡起始位置设立激励器。
[0088]
2、再通过风洞试验或数值计算确定不同迎角下,不同激励器开度可产生的侧向力和偏航力矩。确定激励器开度与偏航力矩线性相关的范围,和线性相关系数。
[0089]
3、再设计如图4所示的飞行控制系统。其中包括导弹的主飞行控制系统,前体涡飞行控制系统。主飞行控制系统由主控制器和主控制效应器组成。前体涡控制系统由侧滑角检测模块,控制增益模块,前体涡控制激励器组成,如图5所示。前体涡控制系统与导弹的主控制系统并联,在不需要侧滑角时在主控制系统中默认侧滑角为零。
[0090]
4、再对导弹进行飞行仿真,确定控制增益模块的增益大小,使前体涡可产生满足要求的控制偏航力矩完成机动即可。
[0091]
本领域技术人员在不脱离本发明的精神和范围的情况下做出各种修改和变型。例如图4所示的控制方法中,主控制系统可根据不同导弹自由选择,不局限于实例中的动态逆和基序列的控制方法,主控制效应器也不限于气动舵面和矢量发动机;前体涡控制系统中,激励器的选择不限于合成射流。这样的修改和变型均落入由所附权利要求所限定的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1