一种基于Hadoop的无人艇自主航行性能测试装置及方法
一种基于hadoop的无人艇自主航行性能测试装置及方法
技术领域
1.本发明涉及无人艇自主航行性能测试技术领域,尤其涉及一种基于hadoop的无人艇自主航行性能测试系统及方法。
背景技术:
2.无人艇是一个集智能传感、人工智能、大数据、云计算、物联网等新技术为一体的全新产业领域,已引起国内外密切关注,因其自主性、安全性、可靠性等要求更高,对无人艇进行全面的测试以验证其能正常行使相关功能,不仅是无人艇交付使用的前提,也是无人艇服役期间必不可少的环节。
3.传统的无人艇性能测试系统一般采用自身携带监测设备所传回的航行坐标数据或根据无人艇避障时间和避障数量作为评判标准,并没有涉及无人艇在测试过程中的实时航行数据、技术指标计算,更没有涉及在研究过程中对无人艇信号采集与控制性能的虚拟测试。因此,开发一套可完成无人艇从生产调试阶段到交付使用阶段的高效测试,能对无人艇自主航行性能进行定量评价的测试系统已成为了客观需求。
技术实现要素:
4.为解决上述技术问题,本发明的目的是提供一种无人艇自主航行性能测试系统及方法,基于hadoop的无人艇自主航行性能测试系统可提供两种测试手段,针对无人艇在生产调试阶段的测试需求,本测试系统提供相应的串口与无人艇实体进行对接,将无人艇置于人为构建的虚拟海洋环境之中,并通过给无人艇不断反馈环境信息以观察无人艇控制系统的反应,可有效测试无人艇的基本控制性能和自主航行性能,设计者还可根据经hadoop平台处理的仿真结果对无人艇性能进行优化,为下一步的下水调试提供有效保障;针对无人艇在交付验证阶段的测试需求,本测试系统根据智能浮标传输回来的实时监测数据和预先制定的无人艇自主航行性能定量评价技术指标及权重,经hadoop平台的写入与读取模块分区存储监测数据,并通过hadoop平台的map/reduce模块高效处理和计算相关数据。本发明还提供后端显示和控制设备,可分屏显示测试场的实时视频信息、无人艇在虚拟海洋环境中航迹偏移量和控制器指令、无人艇自主航行的各级性能评价指标和最终评价结果等信息,以实现无人艇自主航行性能测试的无纸化、可视化、可溯源。
5.本发明的目的通过以下的技术方案来实现:
6.一种无人艇自主航行性能测试系统,包括:
7.智能浮标,搭载传感设备和通信设备,用于环境信息感知及与岸基端通信,即无人艇的航行数据通过携带的传感设备采集,经通信设备将数据传输至岸基端;
8.上位机,用于本地数据的存储以及通过flume将测试场监测数据和无人艇航行数据上传至hadoop集群;
9.hadoop平台,用于通过数据写入功能将测试场检测数据和无人艇航行数据写入hbase数据库,并利用map/reduce框架完成数据处理和评估,实现大量数据的存储和处理,
为无人艇自主航行质量评估提供数据存储和算力保障;
10.虚拟仿真平台,用于将无人艇虚拟模型导入已创建的海洋环境,并输入无人艇的航迹规划信息,通过监测无人艇在虚拟海洋环境中的航迹偏移量来评估该无人艇的自主航行性能;
11.后端显示和控制设备,用于对评价结果的可视化和控制指令的下达。
12.一种无人艇自主航行性能测试方法,该方法基于虚拟仿真技术的无人艇基本性能测试和基于智能浮标的无人艇自主航行性能评估测试完成;
13.基于虚拟仿真技术的无人艇基本性能测试包括:
14.对接无人艇实体,将无人艇置于虚拟海洋环境之中;
15.不断给无人艇反馈环境信息以观察无人艇控制系统的反应;
16.输入无人艇控制指令,验证无人艇的基本控制性能;
17.输入航迹规划信息,验证无人艇的自主航行性能;
18.根据仿真测试结果对无人艇的硬件电路和控制算法进行优化。
19.所述基于智能浮标的无人艇自主航行性能评估测试包括:
20.通过智能浮标采集无人艇航行数据;
21.经上位机上传数据至hadoop集群;
22.经hadoop平台的写入与读取模块分区存储监测数据;
23.根据智能浮标传输回来的实时监测数据和预先制定的无人艇自主航行性能定量评价技术指标及权重,通过hadoop平台的map/reduce模块处理和计算相关数据;
24.输出无人艇自主航行的各级性能评价指标和最终评价结果信息。
25.与现有技术相比,本发明的一个或多个实施例可以具有如下优点:
26.系统与方法以hadoop为基础架构处理虚拟仿真数据和智能浮标采集数据,实现了无人艇从生产调试阶段到交付使用阶段的高效测试,具备存储数据量大、数据处理速度快和硬件容错率高等特点。
附图说明
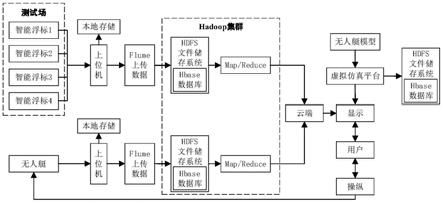
27.图1是无人艇自主航行性能测试系统组成框图;
28.图2是智能浮标与无人艇传感器系统框图;
29.图3是大数据集处理与生成的流程框图;
30.图4是数据写入与读取的流程框图;
31.图5a、5b是虚拟仿真显示界面图;
32.图6a、6b和6c是测试场后端显示界面图。
具体实施方式
33.为使本发明的目的、技术方案和优点更加清楚,下面将结合实施例及附图对本发明作进一步详细的描述。
34.如图1所示,为无人艇自主航行性能测试系统组成框图,包括智能浮标、上位机、hadoop平台、虚拟仿真平台以及后端显示和控制设备;
35.智能浮标,搭载传感设备和通信设备,具有环境信息感知和与岸基端通信功能,无
人艇的航行数据通过其携带的传感设备采集,经通信设备将数据传输至岸基端;
36.上位机,具备本地数据存储和数据上传功能,可通过flume将测试场监测数据和无人艇航行数据上传至hadoop集群;
37.hadoop平台,具备数据存储和数据分析处理功能,可通过数据写入功能将测试场监测数据和无人艇航行数据写入hbase数据库,并利用map/reduce框架完成数据处理和评估,实现大量数据的存储和处理,为无人艇自主航行质量评估提供数据存储和算力保障;
38.虚拟仿真平台,具备无人艇性能预先评估功能,可将无人艇虚拟模型导入已创建的海洋环境,并输入无人艇控制指令或航迹规划信息,通过监测无人艇在虚拟海洋环境中的航迹偏移量和控制系统反馈指令来评估该无人艇的自主航行性能;
39.后端显示和控制设备,具备评价结果可视化和控制指令下达功能。
40.所述hadoop平台包括数据存储模块和数据处理模块;所述数据存储模块包括监测数据实时写入单元和评估结果实时写入单元;所述数据处理模块包括大数据集处理与生成单元、海况评估单元和无人艇自主航行性能评估单元。
41.所述后端显示和控制设备包括评价结果可视化显示模块和无人艇操纵模块;所述评价结果可视化显示模块包括测试场实时视频显示单元、虚拟测试场显示单元和评价结果显示单元;所述无人艇操纵模块包括无人艇路径规划单元和无人艇数据显示单元。
42.所述监测数据实时写入单元具备实时存储大量数据的能力;可根据数据量大小分块存储图像、雷达、gps坐标、风速、浪高等类型的监测数据。
43.所述评估结果实时写入单元可实时存储当前阶段的路径偏移量、避障反应距离、避障反应时间、避障回归距离等评估结果数据,为该次无人艇自主航行性能评价提供各时间节点的评估结果数据。
44.所述大数据集生成与处理单元可对输入数据先后进行分区、排列、合并与递归排序操作,能有效提高后续计算操作的效率。
45.所述海况评估单元可根据风速计和海流计的监测数据计算平均风速、平均浪高和平均波高,并依据对应的海况表输出当前海况等级。
46.所述无人艇自主航行性能评估单元可根据监测数据实时计算路径偏移量、避障反应距离、避障反应时间、避障回归距离等评估数据,该评估数据可直接用于无人艇自主航行性能的评价。
47.所述测试场实时视频显示单元可实时显示智能浮标所携摄像头的拍摄视频。
48.所述虚拟测试场显示单元可显示该无人艇在虚拟海洋环境中预先航迹、实际仿真航迹、航迹偏移量以及控制器指令,能有效预估无人艇的航行性能。
49.所述评价结果显示单元可显示该次无人艇自主航行的各级性能评价指标和最终评价结果(由各级性能评价指标赋予不同的权重计算得出),通过分析处理最终评价结果即可完成无人艇航行性能的量化评估。
50.所述无人艇路径规划单元可根据用户需求,向无人艇下达相应的路径规划指令,在无人艇完成任务后可通过评价结果显示单元观察无人艇的自主航行性能。
51.如图2所示,为智能浮标与无人艇传感器系统框图。智能浮标携带风速计、海流计、摄像头、激光雷达和gps传感器,分别监测风速风向、浪高、目标图像、目标距离、无人艇定位等信息,其中,风速风向和浪高用于海况评估,而目标图像、目标距离、无人艇定位等信息作
为无人艇自主航行性能的评估依据;无人艇携带测速仪、姿态仪、摄像头、激光雷达和gps传感器,分别监测航速、运动状态、目标图像、目标距离、无人艇定位等信息。
52.如图3所示,为大数据集处理与生成的流程框图,具体流程如下:
53.job tracker负责监控所有task tracker与作业的健康,根据数据的数据类型和大小进行切片处理;
54.task tracker接收到job tracker的指令后,使用slot等量划分本节上的资源量;
55.可通过自行设置的job.split信息确定需要开启map task的个数,数据文件进入map task容器后可自动运行脚本;
56.进行逻辑运算后,数据文件进入环形缓冲区,环形缓冲区的大小可根据需求设定;
57.运行map task容器并发送程序启动脚本,对该数据文件进行分区排列处理,由于监测数据量较为庞大,将处理后的数据进行合并压缩,便于后续进行reduce操作;
58.根据需求开启m个reduce task容器,reduce task容器自动从map task对应的分区拉取指定分区的数据,随后运行reduce task程序,将数据按键值对关系进行合并和递归排序处理。
59.如图4所示,为数据写入与读取的流程框图。
60.数据写入具体操作如下:
61.高效数据采集系统flume将智能浮标的监测数据存储目录并将该监测数据上传到hadoop集群的hdfs文件系统,随即向name node发出数据写入请求;
62.name node节点相应该请求后,将测试场的多源监测数据文件分成k个数据块,然后将k个数据块映射到n个编码块中;
63.每个编码块对应一个data node,data node根据请求建立传输通道,随即完成数据写入。
64.以下为监测数据写入算法的处理伪代码:
65.输入:智能浮标经上位机传入监测数据
66.输出:hbase数据库
67.令realtimedata=实时数据流集合,blockcapacity为每个文件块的容量while
68.if realtimedata为视频类型数据
69.if blockcapacity>128mb
70.视频分块;
71.构建索引信息并写入hdfs;
72.if realtimedata为gis类型数据
73.geotools工具解析;
74.构建索引信息并写入hdfs;
75.end while
76.数据读取具体操作如下:
77.后端设备向hdfs文件系统的name node发出数据读取请求;
78.name node节点相应该请求后,自动寻找元数据位置并返回该位置;
79.根据元数据位置找到对应的data node,data node根据请求建立传输通道,随即
完成数据读取。
80.如图5a、5b和图6a、6b、6c所示,为虚拟仿真显示界面图和测试场后端显示界面图。
81.虽然本发明所揭露的实施方式如上,但所述的内容只是为了便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1