一种无人机的视觉定位规避系统及其方法与流程
1.本发明涉及无人机技术领域,具体为一种无人机的视觉定位规避系统及其方法。
背景技术:
2.由于近年来微电子技术和传感器技术的发展,使得完全自主控制的无人飞行器的实现成为可能。目前自主飞行器设计的关键问题集中于信息获取,导航与远程控制系统设计。对于传统的高空飞行无人机,采用gps与惯性测量单元(imu)相结合的方法,可以获取相应的位置姿态,高度,航向信息,以实现飞行控制和路径点导航。但是对于主要应用于低空近地环境的微小型无人机,其飞行环境要复杂的多,因此飞行器不仅要估计自身的位姿,还要感知周围的实际环境。为了实现微小型无人机在低空环境的自主飞行,必需选择合适的传感器获取无人机位姿及周围环境信息;而现有无人机的视觉定位规避系统不能对在复杂飞行环境中不能进行很好的障碍规避。因此我们对此做出改进,提出一种无人机的视觉定位规避系统。
技术实现要素:
3.为了解决上述技术问题,本发明提供了如下的技术方案:本发明一种无人机的视觉定位规避系统,包括既有的无人机,所述无人机上撘载有传感器组和视觉里程计,所述传感器组用于得到无人机当前飞行的加速度、角速度、俯仰角、滚转角和偏航角等数据;所述视觉里程计获得无人机的当前的视觉位姿数据;根据得到的加速度、角速度、俯仰角、滚转角和偏航角等数据得到所述无人机的当前的飞行方向矢量;所述无人机上安装有旋转单元,所述旋转单元上安装有用于对飞行场景图像进行采集的双目摄像头,所述旋转单元的转动与无人机的当前的飞行方向保持同步一致;所述旋转单元上与无人机的当前的飞行方向一致的且对前进方向的障碍物进行测距的激光扫描测距单元,所述无人机上设有带有图像处理模块的微型处理单元,所述旋转单元、激光扫描测距单元、视觉里程计、传感器组均与微型处理单元连接,所述双目摄像头与图像处理模块电性连接。
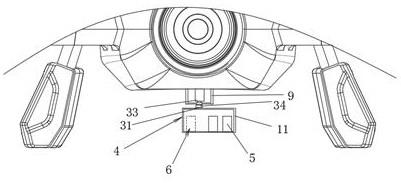
4.作为本发明的一种优选技术方案,所述旋转单元设置在无人机底部的定位架,所述定位架上经轴承安装有竖直向下的转动杆,所述转动杆底端部固定有旋转箱体,所述激光扫描测距单元以及双目摄像头固定在旋转箱体上,所述定位架上固定有驱动转动杆进行转动的第一驱动电机,所述转动杆上设有对转动杆的转动角度进行检测的第一角度传感器;所述第一驱动电机以及第一角度传感器均与微型处理单元电连接。
5.作为本发明的一种优选技术方案,所述激光扫描测距单元包括与旋转箱体相固定的定位座,所述定位座上设有支撑板,所述支撑板上设有横向设置的转动轴,所述转动轴的端部设有旋转盘,所述所述定位座安装有驱动转动轴转动的伺服电机,所述旋转盘上横向设置的托板,所述托板上设有左右摇摆的摆杆,摆杆的摆动部安装有激光测距器,所述旋转盘上设有驱动摆杆摆动的驱动机构。
6.作为本发明的一种优选技术方案,所述驱动机构包括设置在摆杆尾端部的且位于半圆形的转轮,所述转轮上设有沿转轮周向设置的外齿圈,所述托板上安装有定位块,所述定位块上设有限位滑槽,所述限位滑槽内安插有沿限位滑槽滑动的滑动块,所述滑动块的外侧固定有与外齿圈啮合传动的直齿条,所述托板上设有驱动直齿条往复转动的往复机构。
7.作为本发明的一种优选技术方案,所述往复机构包括设置在托板上的转盘,所述转盘上铰接有偏心设置的偏心连杆,所述偏心连杆的外端部与直齿条的端部铰接,所述旋转盘上设有基架,所述基架上固定有驱动转盘转动的第二驱动电机。
8.作为本发明的一种优选技术方案,所述转动轴上设有第二角度传感器。
9.一种无人机的视觉定位规避系统的方法,包括以下几个步骤:步骤1:首先通过传感器组得到无人机当前飞行的加速度、角速度、俯仰角、滚转角和偏航角等数据;视觉里程计获得无人机的当前的视觉位姿数据;步骤2:根据得到的加速度、角速度、俯仰角、滚转角和偏航角等数据得到所述无人机的当前的飞行方向矢量;步骤3:根据获得的无人机的当前的飞行方向矢量,来控制旋转单元进行同步旋转,使得旋转单元的转动与无人机的当前的飞行方向保持同步一致;然后利用双目摄像头对无人机的当前的飞行方向前方的场景进行摄录,得到背景模型数据,同时利用激光扫描测距单元来对前进方向的障碍物进行测距,得到背景距离数据;将背景模型数据和背景距离数据进行整合,得到障碍物规避模型。
10.步骤4:根据障碍物规避模型、无人机的当前的飞行方向矢量、无人机的当前的视觉位姿数据,来得到无人机飞行的安全规避飞行范围。
11.作为本发明的一种优选技术方案,利用激光扫描测距单元来对无人机前进方向的障碍物进行测距的方法是,通过第二驱动电机带动转动盘转动,然后进而带动激光测距器的进行上下防转,同时利用驱动机构带动摆杆往复摆动,两者相结合则激光测距器对无人机前方的障碍物进行空间立体扫描,然后得到一个立体空间的背景距离数据。
12.作为本发明的一种优选技术方案,控制旋转单元进行同步旋转,使得旋转单元的转动与无人机的当前的飞行方向保持同步一致的方法是,根据无人机的当前的飞行方向矢量、无人机的当前的视觉位姿数据来确定转动杆的转动角度,然后在第一驱动电机的驱动作用下,驱动转动杆转动到确定的转动角度,从而使得旋转单元的转动与无人机的当前的飞行方向保持同步一致。
13.本发明的有益效果是:该种无人机的视觉定位规避系统中通过设置与无人机的当前的飞行方向保持同步一致的旋转单位,并在旋转单元上安装有对飞行场景图像进行采集的双目摄像头,以及与无人机的当前的飞行方向一致的且对前进方向的障碍物进行测距的激光扫描测距单元,在飞行时,首先通过传感器组得到无人机当前飞行的加速度、角速度、俯仰角、滚转角和偏航角等数据;视觉里程计获得无人机的当前的视觉位姿数据;根据得到的加速度、角速度、俯仰角、滚转角和偏航角等数据得到所述无人机的当前的飞行方向矢量,根据获得的无人机的当前的飞行方向矢量,来控制旋转单元进行同步旋转,使得旋转单元的转动与无人机的当前的飞行方向保持同步一致;然后利用双目摄像头对无人机的当前的飞行方向前方的
场景进行摄录,得到背景模型数据,同时利用激光扫描测距单元来对前进方向的障碍物进行测距,得到背景距离数据;将背景模型数据和背景距离数据进行整合,得到障碍物规避模型,根据障碍物规避模型、无人机的当前的飞行方向矢量、无人机的当前的视觉位姿数据,来得到无人机飞行的安全规避飞行范围,本发明通过对飞行场景图像进行采集的双目摄像头以及对前进方向的障碍物进行测距,两者相结合,得到无人机飞行的安全规避飞行范围,从而起到了自动规避障碍物的作用,保证无人机安全进行飞行。
附图说明
14.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1是本发明一种无人机的视觉定位规避系统的结构示意图;图2是本发明一种无人机的视觉定位规避系统的旋转单元的安装示意图;图3是本发明一种无人机的视觉定位规避系统的激光扫描测距单元的结构示意图;图4是本发明一种无人机的视觉定位规避系统的驱动机构的结构示意图;图5是本发明一种无人机的视觉定位规避系统的限位滑槽结构示意图;图6是本发明一种无人机的视觉定位规避系统的系统框图;图7是本发明一种无人机的视觉定位规避系统的方法的流程图。
15.图中:1、无人机;2、传感器组;3、视觉里程计;4、旋转单元;5、双目摄像头;6、激光扫描测距单元;7、图像处理模块;8、微型处理单元;9、定位架;10、定位座;11、支撑板;12、转动轴;13、旋转盘;14、伺服电机;15、托板;16、摆杆;17、激光测距器;18、驱动机构;19、转轮;20、外齿圈;21、定位块;22、限位滑槽;23、滑动块;24、直齿条;25、往复机构;26、转盘;27、偏心连杆;28、基架;29、第二驱动电机;30、第二角度传感器;31、转动杆;32、旋转箱体;33、第一驱动电机;34、第一角度传感器。
具体实施方式
16.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
17.实施例:如图1-7所示,本发明一种无人机的视觉定位规避系统,包括既有的无人机,包括既有的无人机1,所述无人机1上撘载有传感器组2和视觉里程计3,所述传感器组2用于得到无人机1当前飞行的加速度、角速度、俯仰角、滚转角和偏航角等数据;所述视觉里程计3获得无人机的当前的视觉位姿数据;根据得到的加速度、角速度、俯仰角、滚转角和偏航角等数据得到所述无人机1的当前的飞行方向矢量;所述无人机1上安装有旋转单元4,所述旋转单元4上安装有用于对飞行场景图像进行采集的双目摄像头5,所述旋转单元4的转动与无人机1的当前的飞行方向保持同步一致;所述旋转单元4上与无人机1的当前的飞行方向一致的且对前进方向的障碍物进行测距的激光扫描测距单元6,所述无人机1上设有带有图像处理模块7的微型处理单元8,所述旋转单元4、激光扫描测距单元6、视觉里程计3、传感器组2均与微型处理单元8连接,所述双目摄像头5与图像处理模块7电性连接。
18.所述旋转单元4设置在无人机1底部的定位架9,所述定位架9上经轴承安装有竖直
向下的转动杆31,所述转动杆31底端部固定有旋转箱体32,所述激光扫描测距单元6以及双目摄像头5固定在旋转箱体32上,所述定位架9上固定有驱动转动杆31进行转动的第一驱动电机33,所述转动杆31上设有对转动杆31的转动角度进行检测的第一角度传感器34;所述第一驱动电机33以及第一角度传感器34均与微型处理单元8电连接。
19.所所述激光扫描测距单元6包括与旋转箱体11相固定的定位座10,所述定位座10上设有支撑板11,所述支撑板11上设有横向设置的转动轴12,所述转动轴12的端部设有旋转盘13,所述所述定位座10安装有驱动转动轴12转动的伺服电机14,所述旋转盘13上横向设置的托板15,所述托板15上设有左右摇摆的摆杆16,摆杆16的摆动部安装有激光测距器17,所述旋转盘13上设有驱动摆杆16摆动的驱动机构18。
20.所述驱动机构18包括设置在摆杆16尾端部的且位于半圆形的转轮19,所述转轮19上设有沿转轮19周向设置的外齿圈20,所述托板15上安装有定位块21,所述定位块21上设有限位滑槽22,所述限位滑槽22内安插有沿限位滑槽22滑动的滑动块23,所述滑动块23的外侧固定有与外齿圈20啮合传动的直齿条24,所述托板15上设有驱动直齿条24往复转动的往复机构25。
21.所述往复机构25包括设置在托板15上的转盘26,所述转盘26上铰接有偏心设置的偏心连杆27,所述偏心连杆27的外端部与直齿条24的端部铰接,所述旋转盘13上设有基架28,所述基架28上固定有驱动转盘26转动的第二驱动电机29。
22.所述转动轴上设有第二角度传感器。
23.一种无人机的视觉定位规避系统的方法,包括以下几个步骤:步骤1:首先通过传感器组得到无人机当前飞行的加速度、角速度、俯仰角、滚转角和偏航角等数据;视觉里程计获得无人机的当前的视觉位姿数据;步骤2:根据得到的加速度、角速度、俯仰角、滚转角和偏航角等数据得到所述无人机的当前的飞行方向矢量;步骤3:根据获得的无人机的当前的飞行方向矢量,来控制旋转单元进行同步旋转,使得旋转单元的转动与无人机的当前的飞行方向保持同步一致;然后利用双目摄像头对无人机的当前的飞行方向前方的场景进行摄录,得到背景模型数据,同时利用激光扫描测距单元来对前进方向的障碍物进行测距,得到背景距离数据;将背景模型数据和背景距离数据进行整合,得到障碍物规避模型。
24.步骤4:根据障碍物规避模型、无人机的当前的飞行方向矢量、无人机的当前的视觉位姿数据,来得到无人机飞行的安全规避飞行范围。
25.利用激光扫描测距单元来对无人机前进方向的障碍物进行测距的方法是,通过第二驱动电机带动转动盘转动,然后进而带动激光测距器的进行上下防转,同时利用驱动机构带动摆杆往复摆动,两者相结合则激光测距器对无人机前方的障碍物进行空间立体扫描,然后得到一个立体空间的背景距离数据。
26.控制旋转单元进行同步旋转,使得旋转单元的转动与无人机的当前的飞行方向保持同步一致的方法是,根据无人机的当前的飞行方向矢量、无人机的当前的视觉位姿数据来确定转动杆的转动角度,然后在第一驱动电机的驱动作用下,驱动转动杆转动到确定的转动角度,从而使得旋转单元的转动与无人机的当前的飞行方向保持同步一致。
27.最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限制本发明,尽管
参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1