一种全向全驱移动机器人的自适应运动控制方法及系统
1.本发明涉及移动机器人控制技术领域,特别是涉及一种全向全驱移动机器人的自适应运动控制方法及系统。
背景技术:
2.目前轮式移动机器人的主要驱动和转向方式有:前驱前转、后驱前转、全驱差速转向、麦克纳姆轮式、全向全驱等。传统的前驱前转、后驱后转虽然结构简单,但转向范围有限,不能实现车辆原地转向,在特殊地形中的通过性较易受到限制。全驱差速转向、麦克纳姆轮式虽然在驱动轮角度不变的情况下实现了全角度转向,但其转向方式造成的传动效率较低,在转向中因摩擦力损失较多能量。全向全驱的转向方式能够使所有驱动轮以任意角度旋转,通过运动控制可实现多种灵活的转向方式,同时能够保持较高的驱动效率,但需要实时调整转向机构和驱动机构互相配合,在运动控制上有一定难度。
3.全向全驱运动控制方法主要依赖阿克曼转向几何原理进行计算。首先建立移动机器人运动学模型,在给定期望转向半径和线速度的情况下,控制器解算出每个车轮理论的角度和速度,下发到伺服电机驱动器执行。为保证转向角度精确,转向电机会采用绝对值编码器,每次工作结束后能够自动回到零位。但随着机器人工作时间的增加,转向电机零位会由于累计误差产生偏移,导致车辆实际运动不能符合阿克曼转向几何,造成驱动轮和地面产生滑动摩擦,从而降低机器人的轨迹跟踪精度和能源效率,甚至电机控制发散。目前针对这种情况还没有有效的解决方法,一般是定期进行人工目视校准,步骤较为繁琐,且精度也得不到保障。
技术实现要素:
4.针对现有技术中存在的缺陷,本发明的目的在于提供一种全向全驱移动机器人的自适应运动控制方法及系统,对机器人工作过程中车轮由于转向电机累计误差进行补偿,得到新的机器人输入速度矢量,提高了机器人的控制精度,降低了机器人的维护成本。
5.为了达到上述目的,本发明所采用的具体技术方案如下:
6.一种全向全驱移动机器人的自适应运动控制方法,具体包括以下步骤:
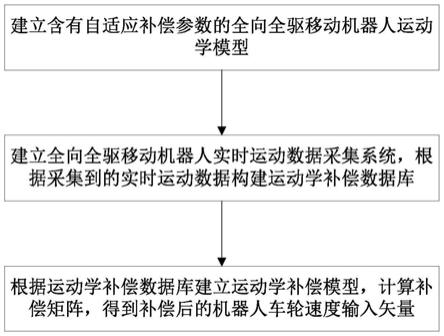
7.步骤1,建立含有自适应补偿参数的全向全驱移动机器人运动学模型,所述自适应补偿参数与每个车轮的偏移角度相关;
8.步骤2,建立全向全驱移动机器人实时运动数据采集系统,根据采集到的实时运动数据构建运动学补偿数据库;
9.步骤3,根据运动学补偿数据库建立运动学补偿模型,计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
10.优选的,步骤1具体包括以下内容:
11.建立移动机器人环境坐标系、移动机器人本体坐标系及其坐标变换关系;
12.根据刚体运动学,确定移动机器人每个驱动轮的理论速度输入矢量;
13.设每个车轮的偏移角度为则自适应补偿角度为计算补偿后每个车轮的速度输入矢量为其中,von为补偿前的理论速度输入矢量,为角度补偿矩阵:
[0014][0015]
优选的,步骤2具体包括以下内容:
[0016]
获取移动机器人在环境坐标系中的实际转向半径rz及实际线速度vz;
[0017]
获取每个车轮的实时速度v
rn
(n=1,2,3,4);
[0018]
获取移动机器人的期望转向半径r和期望线速度v;
[0019]
存储多个时刻对应的期望转向半径、期望线速度、实际转向半径、实际线速度、实时速度,构成运动学补偿数据库。
[0020]
优选的,步骤3具体包括以下内容:
[0021]
建立车轮的角度补偿模型其中,为整车轨迹误差补偿角度,为车轮的转向误差补偿角度,整车轨迹误差补偿角度根据移动机器人实际转向半径分配的车轮转向角度与理想转向角度的差值计算得到,车轮的转向误差补偿角度根据移动机器人实际转向半径分配的车轮线速度和实际车轮线速度的差值计算得到;
[0022]
由刚体运动学和移动机器人期望转向半径求得理想情况下机器人每个车轮的转向角度;
[0023]
根据刚体运动学计算得到移动机器人实际转向半径分配的每个车轮的速度;
[0024]
计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
[0025]
一种全向全驱移动机器人的自适应运动控制系统,包括移动机器人和设在所述移动机器人上的控制器、数据采集器,所述移动机器人的每个车轮上设有驱动电机和转向电机,所述数据采集器采集每个车轮的实时运动数据,并传输给所述控制器;
[0026]
所述控制器建立含有自适应补偿参数的全向全驱移动机器人运动学模型,所述自适应补偿参数与每个车轮的偏移角度相关;根据采集到的实时运动数据构建运动学补偿数据库;根据运动学补偿数据库建立运动学补偿模型,计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
[0027]
优选的,建立含有自适应补偿参数的全向全驱移动机器人运动学模型具体指的是:
[0028]
建立移动机器人环境坐标系、移动机器人本体坐标系及其坐标变换关系;
[0029]
根据刚体运动学,确定移动机器人每个驱动轮的理论速度输入矢量;
[0030]
设每个车轮的偏移角度为则自适应补偿角度为计算补偿后每个车轮的速度输入矢量为其中,von为补偿前的理论速度输入矢量,为角度补偿矩阵:
[0031][0032]
优选的,根据采集到的实时运动数据构建运动学补偿数据库具体指的是:
[0033]
获取移动机器人在环境坐标系中的实际转向半径rz及实际线速度vz;
[0034]
获取每个车轮的实时速度v
rn
(n=1,2,3,4);
[0035]
获取移动机器人的期望转向半径r和期望线速度v;
[0036]
存储多个时刻对应的期望转向半径、期望线速度、实际转向半径、实际线速度、实时速度,构成运动学补偿数据库。
[0037]
优选的,根据运动学补偿数据库建立运动学补偿模型,计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量具体指的是:
[0038]
建立车轮的角度补偿模型其中,为整车轨迹误差补偿角度,为车轮的转向误差补偿角度,整车轨迹误差补偿角度根据移动机器人实际转向半径分配的车轮转向角度与理想转向角度的差值计算得到,车轮的转向误差补偿角度根据移动机器人实际转向半径分配的车轮线速度和实际车轮线速度的差值计算得到;
[0039]
由刚体运动学和移动机器人期望转向半径求得理想情况下机器人每个车轮的转向角度;
[0040]
根据刚体运动学计算得到移动机器人实际转向半径分配的每个车轮的速度;
[0041]
计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
[0042]
本发明的有益效果在于:针对机器人工作过程中由于累计误差可能产生转向角度偏移,对机器人轨迹跟踪精度造成影响的情况,设计了一种在线采集、实时补偿的运动控制方法,对机器人的车轮输入速度矢量进行自适应补偿,以提高机器人控制精度,减少机器人后期维护成本。
附图说明
[0043]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0044]
图1是移动机器人的传动分布图;
[0045]
图2是本发明一种全向全驱移动机器人的自适应运动控制方法的流程图;
[0046]
图3是本发明一种全向全驱移动机器人的自适应运动控制系统的原理框图。
[0047]
图中,1-驱动电机、2-转向电机。
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的其他实施
例,都属于本发明保护的范围。
[0049]
图1中,从上到下,从左到右依次是一号轮、二号轮、三号轮和四号轮。
[0050]
如图1和图2所示,本发明提出了一种全向全驱移动机器人的自适应运动控制方法,具体包括以下步骤:
[0051]
步骤1,建立含有自适应补偿参数的全向全驱移动机器人运动学模型,所述自适应补偿参数与每个车轮的偏移角度相关;
[0052]
步骤1具体包括以下内容:
[0053]
建立移动机器人环境坐标系(xw(t),yw(t),θw(t))、移动机器人本体坐标系(x(t),y(t),θ(t))及其坐标变换关系;给定移动机器人在环境坐标系中的期望运动轨迹,可求得移动机器人在环境坐标系下的速度为移动机器人在本体坐标系下速度为其坐标变换关系为:
[0054][0055]
根据刚体运动学,确定移动机器人每个驱动轮的理论速度输入矢量为
[0056]
von=vm+ω
×mn
,n=1,2,3,4
ꢀꢀꢀ
(2)
[0057]
其中,vm为移动机器人质心速度矢量,ω为移动机器人绕质心旋转的角速度矢量,m为车轮几何中心在移动机器人本体坐标系x-y平面的投影点到质心的位置矢量,
[0058]
设每个车轮的偏移角度为则自适应补偿角度为计算补偿后每个车轮的速度输入矢量为
[0059][0060]
其中,von为补偿前的理论速度输入矢量,为角度补偿矩阵:
[0061][0062]
步骤2,建立全向全驱移动机器人实时运动数据采集系统,根据采集到的实时运动数据构建运动学补偿数据库;
[0063]
步骤2具体包括以下内容:
[0064]
利用移动机器人上的三维激光定位系统获取移动机器人在环境坐标系中的实际转向半径rz(左转为正,右转为负)及实际线速度vz;
[0065]
利用移动机器人驱动电机的编码器获取每个车轮的实时速度v
rn
(n=1,2,3,4);
[0066]
根据上层控制器路径规划结果可获取移动机器人的期望转向半径r(左转为正,右转为负)和期望线速度v;
[0067]
存储多个时刻对应的期望转向半径、期望线速度、实际转向半径、实际线速度、实时速度,构建数组n
t
=[r v r
z v
z v
r1 v
r2 v
r3 v
r4
],t=1,2,...,300,t为控制器时间戳,在控制器中保存过去300个时刻机器人的数组n
t
的实时数据,从而构成运动学补偿数据库为下一步控制器自适应参数的计算提供支持。
[0068]
步骤3,根据运动学补偿数据库建立运动学补偿模型,计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
[0069]
步骤3具体包括以下内容:
[0070]
移动机器人逆运动学是一个多解的问题,不同的转向角度和轮速分配可能产生相同的整车速度,为了在降低整车轨迹跟踪误差的同时,减小每个车轮的局部转向误差,建立车轮的角度补偿模型
[0071]
其中,为整车轨迹误差补偿角度,为车轮的转向误差补偿角度,整车轨迹误差补偿角度根据移动机器人实际转向半径分配的车轮转向角度与理想转向角度的差值计算得到,车轮的转向误差补偿角度根据移动机器人实际转向半径分配的车轮线速度和实际车轮线速度的差值计算得到;
[0072]
由刚体运动学和移动机器人期望转向半径求得理想情况下机器人每个车轮的转向角度;
[0073][0074][0075]
其中,l为机器人轴距,w为机器人轮距。
[0076]
同理可求得由机器人实际转向半径分配的每个车轮角度:
[0077]
[0078][0079]
根据刚体运动学计算得到移动机器人实际转向半径分配的每个车轮的速度;
[0080][0081][0082]
整车轨迹误差补偿角度来源于机器人实际转向半径分配的车轮转向角度于理想转向角度的差值,差值越大,补偿值越大,具体计算方式如下:
[0083][0084]
其中,k1为调整系数,默认值为1,可根据实际情况进行调整。
[0085]
局部转向误差补偿角度基于机器人实际转向半径分配的车轮线速度和实际车轮线速度的差值,根据每个车轮的情况对式(12)中的转角差值进行进一步调整和分配,具体计算方式如下:
[0086][0087]
其中,k2为调整系数,默认值为1,可根据实际情况进行调整。
[0088]
求得单个车轮补偿角度为:
[0089][0090]
联立式(14)、(3)、(4),即得到补偿后的机器人车轮速度输入矢量为:
[0091][0092]
其中,
[0093]
von=vm+ω
×mn
,n=1,2,3,4
[0094]
如图1和图3所示,本发明还提出了一种全向全驱移动机器人的自适应运动控制系统,包括移动机器人和设在所述移动机器人上的控制器、数据采集器,所述移动机器人的每个车轮上设有驱动电机1和转向电机2,所述数据采集器采集每个车轮的实时运动数据,并传输给所述控制器;
[0095]
所述控制器建立含有自适应补偿参数的全向全驱移动机器人运动学模型,所述自适应补偿参数与每个车轮的偏移角度相关;根据采集到的实时运动数据构建运动学补偿数据库;根据运动学补偿数据库建立运动学补偿模型,计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
[0096]
优选的,建立含有自适应补偿参数的全向全驱移动机器人运动学模型具体指的是:
[0097]
建立移动机器人环境坐标系、移动机器人本体坐标系及其坐标变换关系;
[0098]
根据刚体运动学,确定移动机器人每个驱动轮的理论速度输入矢量;
[0099]
设每个车轮的偏移角度为则自适应补偿角度为计算补偿后每个车轮的速度输入矢量为其中,von为补偿前的理论速度输入矢量,为角度补偿矩阵:
[0100][0101]
优选的,根据采集到的实时运动数据构建运动学补偿数据库具体指的是:
[0102]
获取移动机器人在环境坐标系中的实际转向半径rz及实际线速度vz;
[0103]
获取每个车轮的实时速度v
rn
(n=1,2,3,4);
[0104]
获取移动机器人的期望转向半径r和期望线速度v;
[0105]
存储多个时刻对应的期望转向半径、期望线速度、实际转向半径、实际线速度、实时速度,构成运动学补偿数据库。
[0106]
优选的,根据运动学补偿数据库建立运动学补偿模型,计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量具体指的是:
[0107]
建立车轮的角度补偿模型其中,为整车轨迹误差补偿角度,为车轮的转向误差补偿角度,整车轨迹误差补偿角度根据移动机器人实际转向半径分配的车轮转向角度与理想转向角度的差值计算得到,车轮的转向误差补偿角度根据移动机器人实际转向半径分配的车轮线速度和实际车轮线速度的差值计算得到;
[0108]
由刚体运动学和移动机器人期望转向半径求得理想情况下机器人每个车轮的转向角度;
[0109]
根据刚体运动学计算得到移动机器人实际转向半径分配的每个车轮的速度;
[0110]
计算补偿矩阵,得到补偿后的机器人车轮速度输入矢量。
[0111]
本发明的有益效果在于:针对机器人工作过程中由于累计误差可能产生转向角度偏移,对机器人轨迹跟踪精度造成影响的情况,设计了一种在线采集、实时补偿的运动控制方法,对机器人的车轮输入速度矢量进行自适应补偿,以提高机器人控制精度,减少机器人后期维护成本。
[0112]
建立含自适应补偿参数的四轮移动机器人运动学模型,将目标轨迹输入转化为理想车轮速度输入矢量,并与补偿矩阵相乘后提供给运动控制器作为控制输入;采用实时采集数据的方式,收集并保存机器人最近一段时间的期望转向半径及线速度、实际转向半径及线速度、车轮线速度等数据,构建运动学补偿数据库为机器人运动补偿提供支持;建立运动学补偿模型,从整车轨迹误差和每个车轮的线速度误差进行综合补偿,由机器人期望转向半径和实际转向半径的差值得到整车轨迹误差补偿项,由实际转向半径解算的车轮线速度和车轮实际线速度的差值得到车轮线速度误差补偿项,二者结合得到补偿矩阵;将补偿矩阵与机器人车轮理想速度输入矢量结合得到补偿后的机器人车轮速度输入矢量,将其输入运动控制器得到一种全向全驱移动机器人自适应运动控制方法。
[0113]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,本领域技术人员完全可以在不偏离本发明技术思想的范围内,进行多样的变更以及修改。本发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求书范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1