半实物磁浮车辆动力学仿真系统的制作方法
1.本发明涉及仿真控制领域,特别是涉及一种磁浮车辆的动力学仿真系统。
背景技术:
2.随着磁悬浮技术的快速发展,目前已具有可以实现高速运行能力的磁悬浮列车以及运行系统。但是,磁悬浮列车正式投入运行之前,需要先对列车以及运行系统进行初步的调试,以确保各个关键设备的性能正常,避免出现重大安全事故。
3.以磁浮车辆动力学系统为例,磁悬浮列车在运行过程中会由于各种各样的干扰影响,而造成悬浮、导向、涡流制动等子系统与车辆动力学、轨道梁动力学、线路等模型耦合不当。因此,为保障列车的安全平稳运行,在磁悬浮列车正式投入运行之前,必须对磁浮车辆动力学系统进行耦合仿真,以作初步调试和仿真验证。因此,如何提供一种模型简单,真实性强的磁浮车辆动力学仿真系统,是磁悬浮控制系统仿真中亟待解决的一个重要技术问题。
技术实现要素:
4.针对上述技术问题,本发明提供一种半实物磁浮车辆动力学仿真系统,包括:控制模块、电磁模块、车辆动力学模块和轨道梁动力学模块,以实现磁浮控制、电磁、车辆和轨道梁的实时耦合仿真;
5.其中,控制模块和电磁模块,采用实物进行仿真;
6.车辆动力学模块和轨道梁动力学模块,分别采用车辆动力学虚拟模型和轨道梁动力学虚拟模型进行仿真。
7.进一步地,车辆动力学虚拟模型和轨道梁动力学虚拟模型,采用多体动力学软件simpack建立。
8.进一步地,轨道梁动力学虚拟模型,采用多体动力学软件simpack的simbeam模块建立柔性轨道梁模型。
9.进一步地,采用多体动力学软件simpack的realtime模块,实现磁浮控制、电磁、车辆和轨道梁的实时耦合仿真。
10.进一步地,所述车辆动力学虚拟模型,以电磁模块的电磁力为输入,以速度、加速度、间隙为输出信号。
11.进一步地,所述轨道梁动力学虚拟模型,以振幅、频率、轨道梁跨为可配置参数,以随时间和位置变换的轨道变形量为输出信号。
12.进一步地,所述轨道梁动力学虚拟模型,还包括轨道不平顺模型;所述轨道不平顺模型,以行驶速度、列车位置、不平顺指令为输入信号,以轨道不平顺波形为输出信号,以空间频率为可配置参数。
13.本发明的半实物磁浮车辆动力学仿真系统,将难以准确数值模拟的控制部分和电磁部分,作实物部分;将可以准确模拟的车辆机械部分和轨道部分,作虚拟部分,揭示控制
实物模块、电磁实物模块、车辆动力学虚拟模型和轨道梁动力学虚拟模型之间的耦合作用规律、以及主要参数的适用边界,在室内再现各种工况下的磁浮车辆耦合动力学响应,做车辆动力学性能分析、控制系统性能分析和轨道梁动力学性能分析,从而为磁浮交通系统精准设计提供理论依据和应用参考。
附图说明
14.图1为本发明半实物磁浮车辆动力学仿真系统的结构示意图;
15.图2为磁浮车辆的结构示意图;
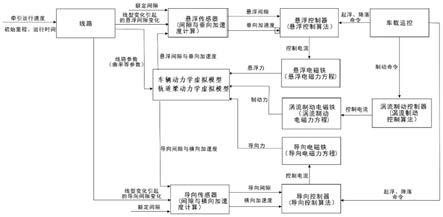
16.图3为本发明半实物磁浮车辆动力学仿真系统的结构框图。
具体实施方式
17.如图1所示,本发明提供了一种半实物磁浮车辆动力学仿真系统,包括控制模块、电磁模块、车辆动力学模块和轨道梁动力学模块,以实现磁浮控制、电磁、车辆和轨道梁的实时耦合仿真。其中,控制模块和电磁模块,采用实物进行仿真;车辆动力学模块和轨道梁动力学模块,分别采用车辆动力学虚拟模型和轨道梁动力学虚拟性进行仿真。
18.本发明的车辆动力学仿真系统,将难以准确数值模拟的控制部分和电磁部分,作实物部分;将可以准确模拟的车辆机械部分和轨道部分,作虚拟部分,揭示控制实物模块、电磁实物模块、车辆动力学虚拟模型和轨道梁动力学虚拟模型之间的耦合作用规律、以及主要参数的适用边界,在室内再现各种工况下的磁浮车辆耦合动力学响应,做车辆动力学性能分析、控制系统性能分析和轨道梁动力学性能分析,从而为磁浮交通系统精准设计提供理论依据和应用参考。
19.具体的,虚拟模型部分,可选但不仅限于基于多体动力学软件simpack建立。(1)关于车辆动力学虚拟模型,如图2所示,磁浮车辆结构主要是由车体和悬浮架(弹性悬浮架)组成。悬浮架上部与车体底板通过空气弹簧、摇臂、摆杆、牵引拉杆等机构连接,而悬浮架是车辆的走形机构,其作用是装载电磁铁,且将悬浮力、导向力、牵引力和制动力通过二系悬挂系统传递给车体。二系悬挂系统结构主要包括空气弹簧、摇枕、摆杆、横向弹簧或橡胶等,以保证车辆运行的稳定性。本发明磁浮车辆动力学虚拟模型将车体、悬浮框、悬浮/导向/制动电磁铁视为刚体,考虑完整的摇振和摆杆机构,二系空气弹簧、电磁铁与悬浮框连接简化为弹簧-阻尼器,车辆各部件的刚体运动自由度见表1。更为具体的,车辆动力学虚拟模型,接收悬浮导向制动系统电磁力、牵引力以及线路相关信息,计算列车悬浮间隙、导向间隙、列车速度等信息。(2)关于轨道梁动力学虚拟模型,因为高速磁浮正线混凝土梁为轨梁一体化结构,可使用simpack软件的simbeam模块建立柔性轨道梁模型,这种方式可以准确模拟简支混凝土轨道梁的弹性变形。最后,使用simpack软件的realtime模块实现控制系统实物模型和车辆、轨道虚拟模型的耦合仿真。
20.表1 simpack动力学模型各部件运动自由度
[0021][0022][0023]
在该实施例中,本发明的车辆动力学仿真系统,利用成熟的商业软件(多体动力学软件simpack)建立车辆动力学虚拟模型和轨道梁动力学虚拟模型,并对车辆和轨道梁模型进行适当优化,以保证系统的高实时性。其通用性和可移植性好,模型调试更加方便,系统的可靠性有一定保证。因此,在一定仿真要求下,优先采用simpack软件开发上述半实物仿真系统的虚拟部分。
[0024]
更为具体的,本发明的半实物磁浮车辆动力学仿真系统,还可选但不仅限于采用实时仿真虚拟模型自主开发,图3给出了半实物半虚拟实时仿真流程图,包括:控制模块(悬浮控制器、涡流制动控制器、导向控制器),以传感器位移(悬浮间隙、导向间隙等)、传感器加速度(垂向加速度、横向加速度)、桥梁挠度、车载运控命令等为输入,以线圈电流(控制电流)为输出;电磁模块(悬浮电磁铁、涡流制动电磁铁、导向电磁铁),以磁铁位移、轨道梁挠度、轨道不平顺和来自控制模块的线圈电流等为输入,以电磁力(悬浮力、制动力、导向力)为输出;车辆动力学虚拟模型以来自电磁铁模块的电磁力等为输入,以传感器位移、传感器加速度和磁铁位移为输出(参见表2);轨道梁动力学虚拟模型以来自电磁铁模块的电磁力等为输入,以电磁铁及传感器对应处的桥梁挠度为输出。
[0025]
(1)具体的,车辆动力学虚拟模型,其车体和悬浮架与图2基本一致,不同之处是将摆杆等效为垂向和横向弹簧-阻尼器,利用zhai方法(新型显式积分法)进行求解。这种车辆动力学模型可忽略对动力学性能影响不大的部件自由度,在保证计算精度的前提下,更容易提高车辆系统动力学计算的实时性,计算速度可达到ms级。具体车辆动力学模型的输入、输出、可配置参数如表2所述。
[0026]
表2车辆动力学虚拟模型的模型输入、输出、可配置参数表
[0027][0028]
(2)更为具体的,轨道梁动力学虚拟模型主要模拟发生车轨耦合振动的工况,计算对应的半实物仿真结果,检验悬浮、导向、涡流制动系统抑制车轨耦合振动的效果。优选的,高速磁浮交通的轨道和桥梁为一体化结构,可视为伯努利-欧拉梁,拟采用matlab软件编制轨道梁动力学模型。伯努利-欧拉梁模型采用模态叠加法求解其动力学响应,其运动微分方程如下式所列,采用公式计算其挠度,计算速度可达到ms级。
[0029][0030][0031]
式中,ei为轨道梁抗弯刚度,c为轨道梁阻尼,m表示轨道梁每延米质量,y(x,t)表示挠度,φn(x)为第n阶振型函数,qn(t)为第n阶振型幅值。具体的,轨道梁动力学模型的输入、输出、可配置参数表如表3所述。
[0032]
表3轨道梁模型输入、输出、可配置参数表
[0033][0034]
更为具体的,可选但不仅限于将轨道梁动力学模型封装成matlab/simulink模型,运行在高性能实时仿真机内,通过反射内存实时获取输入信号以满足不大于1ms运行步长的需求。
[0035]
(3)更为具体的,为优化轨道梁动力学模型,还可选但不仅限于提出轨道不平顺模型。更为具体的,可选但不仅限于采用功率谱密度函数表示,需要采用适当的时频转换方法,得到随里程变化的轨道随机不平顺空间样本。这里采用的是基于频域功率谱的方法,根据双边功率谱密度采样出的频谱幅值加上随机相位,得到频谱,再通过傅里叶逆变换得到轨道不平顺的时域样本,输入到车辆模型中。由于磁浮列车悬浮架的防侧滚梁的设计使悬浮架两侧的悬浮模块在一定自由度内是独立的,从而使得磁浮列车对水平不平顺和轨距不平顺不太敏感。因此,只考虑垂向的高低不平顺和横向上的轨向不平顺对磁浮列车动力学的影响,具体如下:
[0036]
高低不平顺:
[0037][0038]
方向不平顺:
[0039][0040]
ω为轨道不平顺空间频率;ωc、ωr、ωs是截断频率;av、aa是粗糙度常数;b为常数。
[0041]
模型具体计算步骤:
[0042]
首先将轨道不平顺单边功率谱转化为双边谱;计算得到时域序列的频谱模值为:
[0043][0044]
上式给定了序列x(n)的频谱x(k)的模值,构造如下独立相位序列ξn满足:
[0045]
ξn=cosφn+isinφn=exp(iφn)
[0046]
|ξn|=1
[0047]
式中фn服从0~2π之间的均匀分布。
[0048]
由上式可得复序列x(k)的表达式为:
[0049][0050]
最终将得到的复序列x(k)进行傅立叶逆变换(ifft)可得时域序列x(n),经过上述步骤后即可得到时域下的永磁轨道不平顺信号:
[0051][0052]
轨道不平顺模型的输入输出如表4所述:
[0053]
表4轨道不平顺模型输入、输出、可配置参数表
[0054][0055]
更为具体的,轨道不平顺模型可选但不仅限于封装成matlab/simulink模型,通过采用降维和简化等优化技术,运行在高性能实时仿真机内,通过反射内存实时获取输入信号以满足不大于1ms运行步长的需求。由于磁悬浮轨道的随机不平顺的功率谱具有明显的分段特性,所以需要结合高速磁对轨道精度的要求,合理设置悬浮线路轨道随机不平顺的功率谱相关参数。
[0056]
在该实施例中,给出了本发明自主开发的车辆动力学仿真系统,适当简化磁浮车
辆动力学模型,将轨道梁视为欧拉梁模型,较容易达到高实时性要求,在高实时性和高精度无法同时满足的情况下,建议使用上述c语言自主开发半实物仿真系统的虚拟模型。
[0057]
更为具体的,可选但不仅限于按照表5仿真该半实物磁浮车辆动力学仿真系统。
[0058]
表5仿真工况一览表
[0059][0060][0061]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0062]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1