一种实现控制表示电路和驱动电路分离的道岔控制装置的制作方法
1.本实用新型涉及一种道岔控制电路,特别是关于一种实现控制表示电路和驱动电路分离的道岔控制装置。
背景技术:
2.目前国内交流转辙机普遍采用5线制道岔控制电路,直流转辙机普遍采用4线制道岔控制电路,每台转辙机在室内都对应一套组合完成电机操作,状态表示,故障保护功能。交流转辙机通过5根电缆连接到室外的转辙机上,道岔表示信息通过共用这5根电缆返回信号室;直流转辙机通过4根电缆连接到室外的转辙机上,道岔表示信息通过共用这4根电缆返回信号室。随着国内铁路发展,多机牵引道岔目前已经大量应用于提速区段、客运专线和高速铁路,由于配套多台转辙机用于牵引转换,因此机械室内需设置对应的多套组合用于控制,室内外需多路电缆连接用于传输电力及控制和指示信息。设备数量的增多不仅降低了系统的可靠性,也加大了维修工作量及工程建造成本。
技术实现要素:
3.本实用新型的目的是提供一种能减少维修工作量及工程建造成本,提高系统可靠性的可实现控制表示电路和驱动电路分离的道岔控制装置。
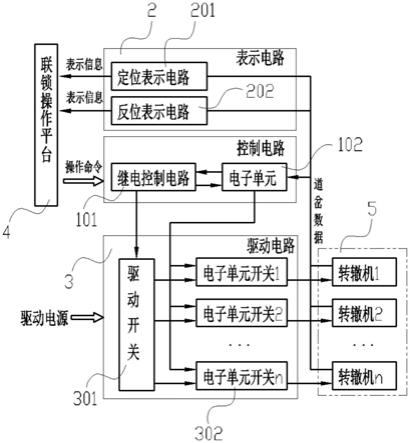
4.为解决上述问题,本实用新型的目的是这样实现的:本实用新型涉及一种实现控制表示电路和驱动电路分离的道岔控制装置,其特征是:它包括:控制电路、表示电路、驱动电路、联锁操作平台单元和转辙机组;所述的控制电路包括继电器控制电路和电子单元,所述的驱动电路包括驱动开关、电子单元开关组,联锁操作平台单元通过表示电路与转辙机组机电连接,表示电路获取转辙机组的信息,将转辙机组的状态信息提供给联锁操作平台单元并进行显示;联锁操作平台单元通过接口与控制电路的继电器控制电路通过接口电连接,通过接口向继电器控制电路发送操作命令,控制电路的继电器控制电路与电子单元进行电连接获取操作命令,通过继电器控制电路与驱动电路的驱动开关电连接,通过电子单元与电子单元开关组电连接,驱动开关与电子单元开关组一起控制转辙机组中的转辙机操作,并将操作信息通过表示电路输出。
5.所述的电子单元开关组包括多组电子开关,转辙机组同样包括多组转辙机, 多组电子开关的每一个开关分别电连接一路多组转辙机中的一个转辙机,多组电子开关的每一路开关分别与驱动开关其中一个接口电连接。
6.所述的电子单元包括数据处理单元、第一速动开关、第二速动开关、第一缓冲开关、第二缓冲开关、无线网络、转辙机工作电流传感单元,数据处理单元通过第一速动开关、第二速动开关、第一缓冲开关、第二缓冲开关与转辙机组控制端电连接,控制转辙机组的转辙机启动正转或反转;数据处理单元同时通过转辙机工作电流传感单元获取转辙机的工作电流;数据处理单元同时与无线网络无线电连接,控制电子开关;通过转辙机工作电流传感单元获取转辙机的工作电流。
7.所述的表示电路包括定位表示电路和反位表示电路;所述的定位表示电路包括:dbj1
‑
4、2dqj132
‑
131、1dqj后接点、2dqj112
‑
111、牵引点1
‑
n转辙机排骨接点31
‑
32、33
‑
34、13
‑
14,二极管d1、电阻r、表示变压器的二次侧、电容c组成表示电路,当电流方向为dbj 1
‑
4时,二极管d1导通,dbj吸起,当电流方向为dbj 4
‑
1时,二极管d1断开,电容c放电保持dbj吸起;所述的反位表示电路包括:fbj1
‑
4、2dqj133
‑
131、1dqj后接点、2dqj113
‑
111、牵引点1
‑
n转辙机排骨接点21
‑
22、23
‑
24、43
‑
44,二极管d1、电阻r、表示变压器的二次侧、电容c组成表示电路,当电流方向为fbj 1
‑
4时,二极管d1导通,fbj吸起,当电流方向为fbj 4
‑
1时,二极管d1断开,电容c放电保持fbj吸起。
8.所述的驱动电路3有两种形式,一种是4线+3线制交流道岔控制电路,另一种是4线+2线制交流道岔控制电路。
9.所述的4线+3线制交流道岔控制电路控制是通过改变三相交流电机任意两相的相序,改变电机的转向,进而控制转辙机向不同方向转换,实现道岔定反位扳动,当联锁系统对道岔进行操作时,1dqjf吸起,三相电源ac380v通过1dqjf前接点给控制道岔的每个牵引点供电,电子单元判断联锁系统是定位操作还是反位操作,当定位操作时,电子单元闭合速动开关ka1和缓动开关ka2,转辙机向定位方向搬动,当转辙机扳动到位时, 电子单元断开ka1、 ka2,转辙机停止动作;当反位操作时, 电子单元闭合速动开关kb1和缓动开关kb2,转辙机向反位方向扳动, 当转辙机扳动到位时, 电子单元断开kb1、 kb2,转辙机停止动作。
10.进一步所述的 4线+3线制交流道岔控制过程通过如下三个过程是:
11.1)、联锁系统发出定位操作指令,dcj吸起,1dqj的3
‑
4线圈通过dcj继电器的前接点,2dqj的141
‑
143,sj和ycj的前接点得电,1dqj吸起,1dqj的前接点接通,1dqjf继电器吸起;
12.2)、2dqj的3
‑
4线圈通过1dqj 、dcj继电器的前接点得电,转极到定位接点闭合;
13.3)、2dqj的反位接点切断1dqj的3
‑
4线圈电路,为下一次操作作准备。kz通过1dqj的1
‑
2线圈、1dqj的前接点、2dqj的定位接点、转辙机排骨接点41
‑
42、电子单元、1dqjf的前接点、2dqj的定位接点连接到kf,1dqj继续保持吸起,电子单元通电工作,期间2dqj的反位接点断开到kz连接到kf,1dqj的3
‑
4线圈和1
‑
2线圈均没有电,1dqj依靠自身缓放特性保持吸起。
14.控制电路是4线+2线制直流道岔控制过程通过如下三个过程给出:
15.1)、联锁系统发出定位操作指令,dcj吸起,1dqj的3
‑
4线圈通过dcj继电器的前接点,2dqj的141
‑
143,sj和ycj的前接点得电,1dqj吸起,1dqj的前接点接通,1dqjf继电器吸起;
16.2)、2dqj的3
‑
4线圈通过1dqj 、dcj继电器的前接点得电,转极到定位接点闭合;
17.3)、2dqj的反位接点切断1dqj的3
‑
4线圈电路,为下一次操作作准备;kz通过1dqj的1
‑
2线圈、1dqj的前接点、2dqj的定位接点、转辙机排骨接点41
‑
42、电子单元、1dqjf的前接点、2dqj的定位接点连接到kf,1dqj继续保持吸起,电子单元通电工作,期间2dqj的反位接点断开到kz连接到kf,1dqj的3
‑
4线圈和1
‑
2线圈均没有电,1dqj依靠自身缓放特性保持吸起;通过切换直流电机不同绕组的电源,就可以改变电机的转向,进而控制转辙机向不同方向转换,实现道岔定反位搬动,当联锁系统对道岔进行操作时,1dqjf吸起,直流电源dc220v通过1dqjf前接点给控制道岔的每个牵引点供电,电子单元判断联锁系统是定位操
作还是反位操作,当定位操作时,电子单元闭合速动开关ka1和缓动开关ka2,转辙机向定位方向扳动,当转辙机扳动到位时, 电子单元断开ka1、 ka2,转辙机停止动作。当反位操作时, 电子单元闭合速动开关kb1和缓动开关kb2,转辙机向反位方向扳动, 当转辙机扳动到位时, 电子单元断开kb1、 kb2,转辙机停止动作。
18.本实用新型的优点是:
19.本实用新型实现了控制、表示电路和驱动电路的分离,防止驱动电压对表示电路产生影响。本实用新型通过驱动线(交流转辙机3根,直流转辙机2根)和4根控制、表示线实现了对一组道岔上的所有的转辙机进行控制,动作完成后返回道岔表示状态,避免了5线制轨道控制电路(交流转辙机控制电路)和4线制轨道控制电路(直流转辙机控制电路)中一组控制电路和转辙机驱动电路只能控制一台转辙机的弊端,节约了室内设备数量和室内到室外道岔的电缆数量。
20.下面结合实施例附图对本实用新型作进一步说明。
附图说明
21.图1是道岔控制电路控制表示电路原理示意图;
22.图2是控制电子单元内部电路图;
23.图3是控制电路、驱动电路、表示电路电连接关系图;
24.图4是4线+3线制交流道岔控制电路转辙机驱动电路;
25.图5是4线+2线制直流道岔控制电路转辙机驱动电路;
26.图6是电路时序图。
27.图中:1、控制电路;101、继电器控制电路;102、电子单元;1020、数据处理单元;1021、第一速动开关;1022、第二速动开关;1023第一缓冲开关;1024、第二缓冲开关;1025、无线网络;1026、转辙机工作电流传感单元;2、表示电路;201、定位表示电路;202、反位表示电路;3、驱动电路;301、驱动开关;302、电子单元开关组;4、联锁操作平台单元;5、转辙机组。
具体实施方式
28.为进一步阐述本实用新型达成预定目的所采取的技术手段及功效,以下结合附图及实施例对本实用新型的具体实施方式、结构特征及其功效,详细说明如下。
29.如图1所示,本实用新型涉及一种实现控制表示电路和驱动电路分离的道岔控制装置,其特征是:它包括:控制电路1、表示电路2、驱动电路3、联锁操作平台单元4和转辙机组5;其中,所述的控制电路1包括:继电器控制电路101和电子单元102,所述的驱动电路3包括驱动开关301、电子单元开关组302,联锁操作平台单元4通过表示电路2与转辙机组5机电连接,表示电路2获取转辙机组5的信息,将转辙机组5的状态信息提供给联锁操作平台单元4并进行显示;联锁操作平台单元4通过接口与控制电路1的继电器控制电路101通过接口电连接,通过接口向继电器控制电路101发送操作命令,控制电路1的继电器控制电路101与电子单元102进行电连接获取操作命令,通过继电器控制电路101与驱动电路3的驱动开关301电连接,通过电子单元102与电子单元开关组302电连接,驱动开关301与电子单元开关组302一起控制转辙机组5中的转辙机操作,并将操作信息通过表示电路2输出。
30.所述的电子单元开关组302包括多组电子开关(a、b、c、
…
n),转辙机组5同样包括多组转辙机(a1、b2、c2、
…
n), 多组电子开关的每一个开关分别电连接一路多组转辙机中的一个转辙机,多组电子开关的每一路开关分别与驱动开关301其中一个接口电连接。
31.如图2所示,电子单元102包括数据处理单元1020、第一速动开关1021、第二速动开关1022、第一缓冲开关1023、第二缓冲开关1024、无线网络1025、转辙机工作电流传感单元1026,数据处理单元1020通过第一速动开关1021、第二速动开关1022、第一缓冲开关1023、第二缓冲开关1024与转辙机组5控制端电连接,控制转辙机组5的转辙机启动正转或反转;数据处理单元1020同时通过转辙机工作电流传感单元1026获取转辙机的工作电流;数据处理单元1020同时与无线网络1025无线电连接,控制电子开关,通过转辙机工作电流传感单元1026获取转辙机的工作电流。
32.如图3所示,所述的表示电路2包括定位表示电路201和反位表示电路202,进一步所述的定位表示电路201包括:(图3最左边虚线左侧)dbj1
‑
4、2dqj132
‑
131、1dqj后接点、2dqj112
‑
111、牵引点1
‑
n转辙机排骨接点31
‑
32、33
‑
34、13
‑
14,二极管d1、电阻r、表示变压器的二次侧、电容c组成表示电路,当电流方向为dbj 1
‑
4时,二极管d1导通,dbj吸起,当电流方向为dbj 4
‑
1时,二极管d1断开,电容c放电保持dbj吸起。
33.所述的反位表示电路202包括:fbj1
‑
4、2dqj133
‑
131、1dqj后接点、2dqj113
‑
111、牵引点1
‑
n转辙机排骨接点21
‑
22、23
‑
24、43
‑
44,二极管d1、电阻r、表示变压器的二次侧、电容c组成表示电路,当电流方向为fbj 1
‑
4时,二极管d1导通,fbj吸起,当电流方向为fbj 4
‑
1时,二极管d1断开,电容c放电保持fbj吸起。
34.如图4和图5所示,驱动电路3有两种形式,一种是4线+3线制交流道岔控制电路,另一种是4线+2线制交流道岔控制电路。
35.对于4线+3线制交流道岔控制电路控制过程参考图4:通过改变三相交流电机任意两相的相序,就可以改变电机的转向,进而控制转辙机向不同方向转换,实现道岔定反位扳动。
36.如图3所示,当联锁系统对道岔进行操作时,1dqjf吸起,三相电源ac380v通过1dqjf前接点给控制道岔的每个牵引点供电,电子单元102判断联锁系统是定位操作还是反位操作,当定位操作时,电子单元102闭合速动开关ka1和缓动开关ka2,转辙机向定位方向扳动,当转辙机扳动到位时, 电子单元102断开ka1、 ka2,转辙机停止动作。当反位操作时, 电子单元102闭合速动开关kb1和缓动开关kb2,转辙机向反位方向扳动, 当转辙机扳动到位时, 电子单元断开kb1、 kb2,转辙机停止动作。驱动电路时序见图6。
37.如图4所示,所述的 4线+3线制交流道岔控制过程为三步:
38.1)、联锁系统发出定位操作指令,dcj吸起,1dqj的3
‑
4线圈通过dcj继电器的前接点,2dqj的141
‑
143,sj和ycj的前接点得电,1dqj吸起,1dqj的前接点接通,1dqjf继电器吸起。
39.2)、2dqj的3
‑
4线圈通过1dqj 、dcj继电器的前接点得电,转极到定位接点闭合。
40.3)、2dqj的反位接点切断1dqj的3
‑
4线圈电路,为下一次操作作准备。kz通过1dqj的1
‑
2线圈、1dqj的前接点、2dqj的定位接点、转辙机排骨接点41
‑
42、电子单元102、1dqjf的前接点、2dqj的定位接点连接到kf,1dqj继续保持吸起,电子单元102通电工作,期间2dqj的反位接点断开到kz连接到kf,1dqj的3
‑
4线圈和1
‑
2线圈均没有电,1dqj依靠自身缓放特性
保持吸起。控制电路时序图见图6。
41.如图5所示:所述的控制电路是4线+2线制直流道岔控制电路,以定位操作为例启动电路如图3所示,启动过程为:
42.1)、联锁系统发出定位操作指令,dcj吸起,1dqj的3
‑
4线圈通过dcj继电器的前接点,2dqj的141
‑
143,sj和ycj的前接点得电,1dqj吸起,1dqj的前接点接通,1dqjf继电器吸起(见图3)。
43.2)、2dqj的3
‑
4线圈通过1dqj 、dcj继电器的前接点得电,转极到定位接点闭合。
44.3)、2dqj的反位接点切断1dqj的3
‑
4线圈电路,为下一次操作作准备。kz通过1dqj的1
‑
2线圈、1dqj的前接点、2dqj的定位接点、转辙机排骨接点41
‑
42、电子单元、1dqjf的前接点、2dqj的定位接点连接到kf,1dqj继续保持吸起,电子单元102通电工作,期间2dqj的反位接点断开到kz连接到kf,1dqj的3
‑
4线圈和1
‑
2线圈均没有电,1dqj依靠自身缓放特性保持吸起,启动电路时序图见图5。
45.通过切换直流电机不同绕组的电源,就可以改变电机的转向,进而控制转辙机向不同方向转换,实现道岔定反位扳动。如图5所示,当联锁系统对道岔进行操作时,1dqjf吸起,直流电源dc220v通过1dqjf前接点给控制道岔的每个牵引点供电,电子单元102判断联锁系统是定位操作还是反位操作,当定位操作时,电子单元102闭合速动开关ka1和缓动开关ka2,转辙机向定位方向扳动,当转辙机扳动到位时, 电子单元102断开速动开关ka1、缓动开关ka2,转辙机停止动作。当反位操作时, 电子单元102闭合速动开关kb1和缓动开关kb2,转辙机向反位方向扳动, 当转辙机扳动到位时, 电子单元102断开速动开关kb1、缓动开关kb2,转辙机停止动作。驱动电路时序图见图6。
46.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1