一种用于航天器的空芯磁力矩器的制作方法
1.本实用新型涉及航空航天的技术领域,具体地涉及一种用于航天器的空芯磁力矩器。
背景技术:
2.随着科技的发展,卫星、对地观测平台、宇宙飞船、空间望远镜等航天器技术日趋成熟。航天器的姿态控制系统是航天器的重要组成部分,姿态控制系统是指对航天器的姿态控制的一种系统,其基本任务是保证航天器自在飞行过程中具有良好的稳定性和操作性。姿态控制系统又称为稳定控制系统、稳定回路。姿态控制系统的主要作用是维持航天器飞行过程中的姿态稳定,同时实施导航或制导系统产生的轨道控制指令。姿态控制系统接受两个方面的控制信息:一是来自姿态敏感器的信息,该信息是由于航天器受干扰作用使姿态偏离原来状态而产生的。姿态敏感器信息经过自动稳定装置(控制器)生成控制信号,再通过伺服机构产生控制力。控制力作用于航天器本体,使之回到原来的姿态位置,这样形成一个负反馈的闭环控制回路,保证航天器姿态稳定。另一个控制信息来自导航或制导系统,它们是航天器机动转弯的导引指令。
3.航天器上可谓“寸土寸金”,零件的重量和体积是必须要考虑的重要因素,即使多一克或一立方厘米,对航天器的制造成本也是巨大的。因此姿态控制系统的重量和体积是工程技术人员在设计时关注的重点。
4.目前,航天器姿态控制系统包括:反作用飞轮、磁力矩器、陀螺仪、控制组件等。其中反作用飞轮是控制航天器姿态的部件,为了保证控制可靠性,一般会设计多组反作用飞轮,每组反作用飞轮包括x轴、y轴、z轴反作用飞轮,而每个反作用飞轮的形状体积是固定的,所以无论如何设计摆放,箱体的高度至少要等于反作用飞轮的高度。当箱体的高度设计为等于反作用飞轮的高度时,控制组件就需要放置在箱体底板的中心而反作用飞轮围绕控制组件放置。其中磁力矩器是对反作用飞轮进行磁卸载的装置。一般来说,磁力矩器主体由高磁导率的棒状磁芯和外部均匀密绕的线圈组成,线圈通以额定电流,则会产生所需的工作磁矩。通常,智能姿控组件中设置一组三个磁力矩器,即x轴磁力矩器、y轴磁力矩器、z轴磁力矩器各一个,因为磁力矩器中棒状磁芯的存在,所以无论怎么设计布局,磁力矩器部件所占空间都会很大,而且形状基本固定,与其他部件以及每个磁力矩器之间无法穿插设置。另外,三个磁力矩器在布局上无法做到使智能姿控组件整体上重量均衡。
技术实现要素:
5.为克服现有技术的缺陷,本实用新型要解决的技术问题是提供了一种用于航天器的空芯线圈式磁力矩器,其能够大大减少磁力矩器部件所占空间,可以实现与其他部件穿插设置,三个磁力矩器在布局上做到使智能姿控组件整体上重量均衡,减少磁力矩器部件受到的振动,而且能够加大航空器姿态控制的可靠性。
6.本实用新型的技术方案是:这种用于航天器的空芯磁力矩器,航天器上的姿态控
制系统包括:箱体(1)、反作用飞轮(2)、磁力矩器部件、控制组件(3)、陀螺仪(4),箱体包括四个侧壁和一个底板,控制组件(3)安装在底板的中心位置上,
7.在箱体的四个侧壁内部均设置一个矩形安装框架,在箱体的底板上设置异形安装框架;
8.磁力矩器部件对反作用飞轮进行磁卸载,且包括:x轴空芯磁力矩器(51)、y轴空芯磁力矩器(52)、z轴空芯磁力矩器(53);每个空芯磁力矩器是由线圈围绕而成的闭环,x轴空芯磁力矩器(51)为两个并分别固定在前、后侧壁的矩形安装框架上,y轴空芯磁力矩器(52)为两个并分别固定在左、右侧壁的矩形安装框架上,z轴空芯磁力矩器(53)固定在箱体的底板上的异形安装框架上。
9.本实用新型的x、y、z轴方向的磁力矩器是由线圈围绕而成的闭环,没有中间的磁棒,因此能够大大减少磁力矩器部件所占空间,可以实现与其他部件穿插设置;z轴空芯磁力矩器固定在箱体的底板上的异形安装框架上,从而x轴空芯磁力矩器、y轴空芯磁力矩器可以对称放置,因此三个磁力矩器在布局上做到使智能姿控组件整体上重量均衡;x轴空芯磁力矩器为两个并分别固定在前、后侧壁的矩形安装框架上,y轴空芯磁力矩器为两个并分别固定在左、右侧壁的矩形安装框架上,所以能够减少磁力矩器部件受到的振动;x轴空芯磁力矩器为两个,y轴空芯磁力矩器为两个,因此能够加大航空器姿态控制的可靠性。
附图说明
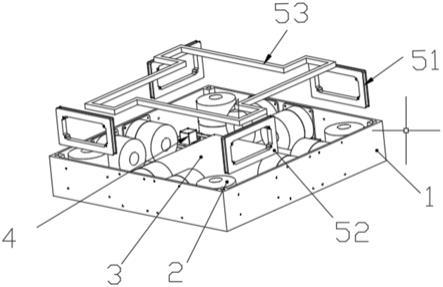
10.图1示出了根据本实用新型的用于航天器的空芯磁力矩器的整体结构图。
11.图2示出了图1的x轴空芯磁力矩器、y轴空芯磁力矩器的俯视图。
12.图3示出了图1的z轴空芯磁力矩器的俯视图。
13.图4示出了图1的z轴空芯磁力矩器的立体图。
具体实施方式
14.如图1所示,这种用于航天器的空芯磁力矩器,航天器上的姿态控制系统包括:箱体1、反作用飞轮2、磁力矩器部件、控制组件3、陀螺仪4,箱体包括四个侧壁和一个底板,控制组件3安装在底板的中心位置上,
15.在箱体的四个侧壁内部均设置一个矩形安装框架,在箱体的底板上设置异形安装框架;
16.磁力矩器部件对反作用飞轮进行磁卸载,且包括:x轴空芯磁力矩器51、y轴空芯磁力矩器52、z轴空芯磁力矩器53;每个空芯磁力矩器是由线圈围绕而成的闭环,x轴空芯磁力矩器51为两个并分别固定在前、后侧壁的矩形安装框架上,y轴空芯磁力矩器52为两个并分别固定在左、右侧壁的矩形安装框架上,z轴空芯磁力矩器53固定在箱体的底板上的异形安装框架上。
17.本实用新型的x、y、z轴方向的磁力矩器是由线圈围绕而成的闭环,没有中间的磁棒,因此能够大大减少磁力矩器部件所占空间,可以实现与其他部件穿插设置;z轴空芯磁力矩器固定在箱体的底板上的异形安装框架上,从而x轴磁力矩器、y轴磁力矩器可以对称放置,因此三个磁力矩器在布局上做到使智能姿控组件整体上重量均衡;x轴空芯磁力矩器为两个并分别固定在前、后侧壁的矩形安装框架上,y轴空芯磁力矩器为两个并分别固定在
左、右侧壁的矩形安装框架上,所以能够大大减少磁力矩器部件安装在箱体底板上受到的振动,保证x轴空芯磁力矩器、y轴空芯磁力矩器正常工作;x轴空芯磁力矩器为两个,y轴空芯磁力矩器为两个,因此能够加大航空器姿态控制的可靠性。
18.优选地,如图1所示,所述异形安装框架围绕控制组件3设置。这样能够更加节约空间,降低制造成本。
19.优选地,如图1所示,所述箱体1的横截面为正方形;所述反作用飞轮2包括四组,每组的z轴反作用飞轮设置在所述箱体的一个角处;两个x轴反作用飞轮在左侧壁,另两个x轴反作用飞轮在右侧壁,左侧壁的x轴反作用飞轮与右侧壁的x轴反作用飞轮是岔开的,左侧壁的x轴反作用飞轮与右侧壁的矩形安装框架相对;两个y轴反作用飞轮在前侧壁,另两个y轴反作用飞轮在后侧壁,前侧壁的y轴反作用飞轮与后侧壁的y轴反作用飞轮是岔开的,前侧壁的y轴反作用飞轮与后侧壁的矩形安装框架相对。这样能够更加节约空间,降低制造成本,而且能够使智能姿控组件整体上重量均衡。
20.优选地,如图1、3、4所示,z轴空芯磁力矩器的闭环是正方形的,正方形的四个角向外凸起,所述x轴空芯磁力矩器51、y轴空芯磁力矩器52分别设置在z轴空芯磁力矩器的闭环的凸起的上方。
21.优选地,如图1所示,所述陀螺仪4安装在所述z轴空芯磁力矩器的闭环的向外凸起处。
22.所述反作用飞轮采用了四组,能够极大地加强航天器姿态控制的可靠性。每组的x轴、y轴、z轴三个反作用飞轮设置在所述箱体的一个角处,能够使智能姿控组件整体上重量均衡。
23.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1