一种柔性制造系统的制作方法
1.本实用新型涉及一种制造设备领域,具体是涉及一种柔性制造系统。
背景技术:
2.传统工厂企业设备老化,设备使用率低,自动化程度不高,随着人工成本的不断上升,及人才短缺的现实情况,组建自动化、数字化的工厂是企业发展的发展趋势。由统一的信息控制系统、物料存储系统和一组数字加工设备组成的fms柔性制造系统能适用企业的需求。柔性制造系统是以数控机床或加工中心为基础,配以物料传送装置组成的生产系统。该系统由电子计算机实现自动控制,能在不停机的情况下,满足多品种的加工。柔性制造系统适合加工形状复杂,加工工序多,批量大的零件。
3.现有的柔性制造系统,存在以下缺陷:一是采用非隔离的工作模式,工作期间不够安全可靠;二是各设备的布置不够合理,机器人取放料的工作效率不高;三是布局不紧凑,占用的空间大。
4.另外,现有的机器人完成一种零部件的夹取后,需要夹取不同形状的其他零件时,需要停机,然后通过人工更换与夹取零件相对应的手爪,这种工作方式,不仅工作效率低,而且劳动强度大。
技术实现要素:
5.本实用新型的目的在于提出一种柔性制造系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
6.为解决上述技术问题,本实用新型所采用的技术方案是:
7.一种柔性制造系统,包括加工中心a、车铣复合机床、左安全护栏、机器人控制柜、主控柜、电脑工作台、料库、加工中心b、地轨、滑车、六关节机器人和右安全护栏,所述的加工中心a、车铣复合机床、左安全护栏、机器人控制柜、主控柜、电脑工作台、料库、加工中心b和右安全护栏围合成一个隔离工作区,地轨设在隔离工作区内的地面上,六关节机器人设在滑车上,滑车设在地轨上,六关节机器人,用以给加工中心a、车铣复合机床、料库和加工中心b取放被加工件,所述主控柜中的伺服驱动器用于驱动滑车沿着地轨移动,所述电脑工作台上设有电脑,所述的机器人控制柜通过重载电缆与六关节机器人相连,用以控制六关节机器人的动作。
8.进一步地,所述加工中心a和加工中心b面对面放置且位于地轨的两侧,电脑工作台的右侧为主控柜,主控柜的右侧放置机器人控制柜。
9.进一步地,所述隔离工作区内且位于地轨的一端设有手爪快换机构。
10.进一步地,所述手爪快换机构,包括快换工作台、快换夹具、快换主接头、快锁机构和快换副接头,所述快换主接头通过螺丝与机器人手臂端部的法兰连接,快换副接头设有多个,多个快换副接头分别与不同型号的机器人手爪连接;快换夹具设有多个,一个快换副接头对应一个快换夹具,多个快换夹具分布安装在快换工作台的边缘,用以将快换副接头
夹住,当机器人手臂上的所述快换主接头移动到快换副接头的顶部时,快锁机构将快换主接头扣和快换副接头连接在一起。
11.进一步地,所述的快换夹具包括左夹持臂、右夹持臂和复位弹簧,所述快换工作台上设有安装槽,安装槽的底面上设有两个固定孔,两个固定孔中设有铰接柱,左夹持臂上的铰接孔和右夹持臂上的铰接孔分别插入到两个铰接柱上,左夹持臂、右夹持臂能相对与之插接的铰接柱转动,左夹持臂的一端和右夹持臂的一端为夹持部,左夹持臂的另一端和右夹持臂的另一端为复位受力部,夹持部位于安装槽外,复位受力部位于安装槽中,所述复位弹簧设在安装槽中且位于左、右夹持臂的复位受力部之间。
12.进一步地,所述快换副接头包括快速连接座、夹持体和手爪固定座,快速连接座通过夹持体与手爪固定座连接,快换夹具夹持在夹持体上。
13.进一步地,所述的快换副接头的夹持体侧壁面上设有夹持槽,左、右夹持臂的夹持部夹持在夹持槽中。这样设计可以防止快换副接头在左、右夹持臂中滑脱,以提高夹持的牢固性。
14.进一步地,所述的安装槽中且位于左、右夹持臂之间的位置设有定位块,所述定位块的一端伸出到安装槽外,所述快换副接头的夹持体侧壁面上设有定位槽,当快换副接头的夹持体夹持在快换夹具中时,所述定位块的一端位于定位槽中。这样设计能够限定快换副接头在快换夹具上的夹装角度,以定位快换副接头,这样有利于与快换主接头的连接。
15.进一步地,所述快换工作台通过螺丝固定在支架上,支架固定在底座上。
16.本实用新型的有益效果在于:
17.本专利由于柔性制造系统中各设备采用上述的布置模式,使各设备围合成一个隔离工作区,工作过程更加安全可靠,并且不需要专门设置围栏,各设备间的布置合理紧凑,方便了线路连接,也确保了六关节机器人的高效运行,并且还节省了工作场地的占用。
18.由于增设手爪快换机构,将夹取不同形状零件的手爪放置在快换工作台的夹具中,大大方便了机器人的快速换装,并且实现不停机更换手爪,使机器人的通用性更强,工作效率更高。
附图说明
19.利用附图对本实用新型作进一步说明,但附图中的实施例不构成对本实用新型的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图:
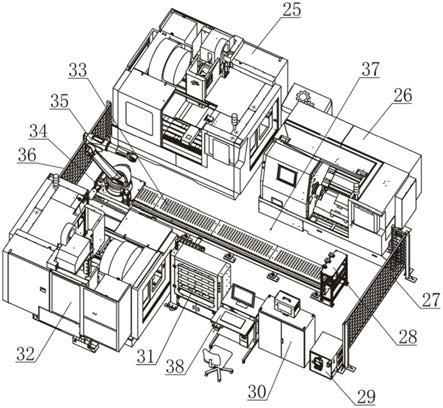
20.图1为本实用新型的结构示意图;
21.图2为图1所示快换工作台的结构示意图;
22.图3为图2所示快换副接头的放大图;
23.图4为图2所示快换工作台的结构示意图;
24.图5为图2所示快换夹具的结构示意图。
25.图中:1、快换工作台;2、快换夹具;3、快换主接头;4、快换副接头;5、手爪;6、快速连接座;7、夹持体;8、手爪固定座;9、夹持槽;10、定位槽;11、左夹持臂;12、右夹持臂;13、复位弹簧;14、安装槽;15、固定孔;16、铰接柱;17、铰接孔;18、夹持部;19、复位受力部;20、定位块;21、倒角;23、支架;24、底座。
具体实施方式
26.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和具体实施例对本实用新型作进一步详细的描述,需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
27.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上表面”、“下表面”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“正转”、“反转”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.如图1所示,一种柔性制造系统,包括加工中心a25、车铣复合机床26、左安全护栏27、手爪快换机构28、机器人控制柜29、主控柜30、电脑工作台38、料库31、加工中心b32、地轨33、滑车34、六关节机器人35和右安全护栏36,所述的加工中心a25、车铣复合机床26、左安全护栏27、机器人控制柜29、主控柜30、电脑工作台38、料库31、加工中心b32和右安全护栏36围合成一个隔离工作区37,地轨33设在隔离工作区37内的地面上,六关节机器人35设在滑车34上,滑车34设在地轨33上,六关节机器人35用以给加工中心a25、车铣复合机床26、料库31和加工中心b32取放被加工件,所述主控柜30中的伺服驱动器用于驱动滑车34沿着地轨33移动,所述电脑工作台31上的电脑,用于登陆浏览器访问l-mes生产管控系统。所述的机器人控制柜29通过重载电缆与六关节机器人35相连,用以控制六关节机器人的动作。所述加工中心a和加工中心b面对面放置且位于地轨的两侧,电脑工作台的右侧为主控柜,主控柜的右侧放置机器人控制柜。由于柔性制造系统中各设备采用上述的布置模式,使各设备围合成一个隔离工作区,工作过程更加安全可靠,并且不需要专门设置围栏,各设备间的布置合理紧凑,方便了线路连接,也确保了六关节机器人的高效运行,并且还节省了工作场地的占用。
29.如图2、3、4、5所示,手爪快换机构28,包括快换工作台1、快换夹具2、快换主接头3、快锁机构和快换副接头4,所述快换主接头3通过螺丝与机器人手臂端部的法兰连接,快换副接头3设有多个,多个快换副接头3分别与不同型号的机器人手爪5连接;快换夹具2设有多个,一个快换副接头4对应一个快换夹具2,多个快换夹具2分布安装在快换工作台1的边缘,用以将快换副接头4夹住,当机器人手臂上的所述快换主接头移动到快换副接头的顶部时,快锁机构将快换主接头扣和快换副接头连接在一起。快换工作台1通过螺丝固定在支架23上,支架23固定在底座24上。
30.所述快换副接头3包括快速连接座6、夹持体7和手爪固定座8,快速连接座6通过夹持体7与手爪固定座8连接,快换夹具2夹持在夹持体7上,快速连接座6通过快锁机构与快换主接头连接;手爪固定座8与机器人手爪5中的气缸连接。所述的快换副接头的夹持体7侧壁面上设有夹持槽9,所述快换副接头的夹持体7侧壁面上设有定位槽10。
31.所述的快换夹具2包括左夹持臂11、右夹持臂12和复位弹簧13,所述快换工作台1上设有安装槽14,安装槽14的底面上设有两个固定孔15,两个固定孔15中设有铰接柱16,左夹持臂11上的铰接孔17和右夹持臂12上的铰接孔17分别插入到两个铰接柱16上,左夹持臂11、右夹持臂12能相对与之插接的铰接柱16转动,左夹持臂11的一端和右夹持臂12的一端
为夹持部18,左夹持臂的另一端和右夹持臂的另一端为复位受力部19,夹持部18位于安装槽14外,复位受力部19位于安装槽14中,所述复位弹簧13设在安装槽14中且位于左、右夹持臂的复位受力部19之间。
32.左、右夹持臂的夹持部夹持在快换副接头的夹持体7侧壁面上的夹持槽9中,这样可以防止快换副接头在左、右夹持臂中滑脱,以提高夹持的牢固性。
33.所述的安装槽14中且位于左、右夹持臂之间的位置设有定位块20,所述定位块20的一端伸出到安装槽14外,当快换副接头的夹持体7夹持在快换夹具中时,所述定位块20的一端位于夹持体7上的定位槽10中。由于在安装槽增设了定位块,快换副接头在夹装时,具有方向性,对手爪的安装角度加以限定,使机器人能一步到位地实现快速换装。
34.所述的快锁机构采用现有技术中常用的电磁锁紧机构或气动锁紧机构,本实施例中采用的是气动锁紧机构,具体来讲,在快换主接头3上的圆柱状插接头上沿圆周方向分布有3个径向孔,径向孔内设有钢珠,在快换副接头4的插孔的孔壁上设有环形卡接槽,当快换主接头3上的圆柱状插接头插入到快换副接头4的插孔中后,气阀打开,高压气推动钢珠,使钢珠的一部分伸出到圆柱状插接头的径向孔外并伸入到快换副接头4的插孔的孔壁上的环形卡接槽中,从而将快换主接头3与快换副接头4连接在一起,由于这是常规技术,所以不再配图加以说明了。
35.手爪快换机构主要是夹取不同形状零件的手爪放置在快换工作台的夹具中,在夹装时,对手爪的安装角度加以限定,以保证机器人的自动快速换装,当机器人需要夹取不同形状的零件时,即可以在工作台上换取零件相对应的手爪。本专利为了解决以上的问题,提供一种机器人可快速更换末端执行器的快换装置。快换手爪装置可应用于材料抓举、检测、装配、包装等操作,实现不停机更换夹具。例如在柔性制造单元上加工不同的工件,机器人需要夹取ф68mm的圆棒毛坯和110*110mm的方块毛坯两种,此时使用快换装置及配套的工作台,几秒钟就可以完成手爪的更换,不需要停机更换。
36.此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1