一种带有平衡飞轮和视觉引导模块的无人自行车实验平台
1.本实用新型属于移动机器人领域,具体涉及一种带有平衡飞轮和视觉引导模块的无人自行车实验平台。
背景技术:
2.自行车是一种诞生于18世纪的交通工具,也是一种独特的机械系统,传统意义上的自行车只有在具有一定车速的条件下才可以进行平衡控制和运动方向控制。
3.随着控制理论和人工智能技术的发展,许多研究者开始从控制理论的角度研究自行车的平衡问题,并搭建了各种无人自行车。作为一种移动机器人平台,无人自行车还可以用于运动控制、路径规划和智能感知等方面的实验研究,可以作为一种多用途的实验平台,对控制理论和人工智能技术的实验验证有积极的意义。
4.目前的无人自行车平台大多数采用单片机作为信号处理元件和控制元件,通过陀螺仪测量系统的横滚倾斜角,通过对电机、舵机以及辅助平衡调节器作为执行元件,对系统的平衡和移动进行控制。
技术实现要素:
5.本实用新型的主要目的在于克服现有技术的缺点与不足,提出一种带有平衡飞轮和视觉引导模块的无人自行车实验平台,在现有结构的基础上,增加了卡片电脑和摄像头,组成视觉引导模块,使得系统能够执行更为复杂的运动控制任务。
6.为了达到上述目的,本实用新型采用以下技术方案:
7.一种带有平衡飞轮和视觉引导模块的无人自行车实验平台,包括机械平台、嵌入式控制板、视觉引导模块、电源管理模块以及电池;
8.机械平台包括车身主体、前轮转向系统、辅助平衡装置、后轮驱动系统以及各个组成之间的固定和连接结构;
9.嵌入式控制板、视觉引导模块、电源管理模块以及电池组成电控模块,电控模块通过螺丝、螺母以及铜柱固设在车身主体尾部;
10.视觉引导模块,用于获取和处理图像,实现对环境的感知,为无人自行车实验平台在环境中的移动提供引导信息;
11.电源管理模块,用于将电池的电压转换为稳定的标准电压,对机械平台、嵌入式控制板以及视觉引导模块进行供电。
12.进一步的,前轮转向系统包括舵机、前叉、前轮以及连接结构,设置于车身主体前部,用于控制无人自行车实验平台转向;
13.辅助平衡装置包括平衡电机以及平衡飞轮,用于提供平衡控制力矩使车身主体保持平衡;平衡电机通过螺丝和螺母固定在车身中部的镂空部分内,平衡飞轮通过联轴器、螺丝以及螺母固定在平衡电机输出轴上;
14.后轮转向系统包括减速电机、传动结构以及后轮,设置在车身主体后部,用于驱动
无人自行车实验平台前进或后退;
15.平衡电机和减速电机均带有磁编码器,用于测量转速。
16.进一步的,嵌入式控制板包括主控芯片、姿态传感器、电机控制模块以及通信接口;嵌入式控制板通过交叉编译方式将编译完成的代码下载到主控芯片上运行,从而实现运动控制;
17.主控芯片用于执行传感器信号处理和运动控制任务,包括无人自行车实验平台的平衡控制以及在环境中的移动方向控制;
18.姿态传感器用于测量无人自行车实验平台的横滚角,同时将测得数据传输给主控芯片,作为平衡控制的反馈信号。
19.进一步的,电机控制模块包括功率放大电路、编码器测速脉冲输入接口以及电流反馈采样电路;
20.功率放大电路用于将主控芯片对平衡电机和减速电机的控制信号转化为对应的驱动电压,起到功率放大的作用;
21.编码器测速脉冲输入接口用于采集两个电机的磁编码器的测速脉冲信号,获取平衡电机和减速电机的转速,作为平衡控制和移动方向控制的反馈信号;
22.电流反馈采样电路用于将平衡电机和减速电机的电流信号通过采样电阻转化为电压信号,使得主控芯片能通过测量电压信号计算平衡电机和减速电机的电流大小。
23.进一步的,通信接口通过信号线与视觉引导模块连接并进行通信。
24.进一步的,视觉引导模块由卡片电脑和摄像头通过数据线连接组成;
25.摄像头直接与卡片电脑通信,摄像头通过连接件固定在车身主体的车头上方。
26.进一步的,视觉引导模块能连接无线局域网络,用户能以远程登陆的方式在卡片电脑上编写视觉引导算法。
27.进一步的,电控模块中,电池通过胶带固定在车身主体尾部,卡片电脑通过螺丝和铜柱固定在电池上方,嵌入式控制板通过螺丝和铜柱固定在卡片电脑上方,电源管理模块固定在嵌入式控制板上方。
28.进一步的,电池与电源管理模块的输入端通过导线连接,电源管理模块的输出端与机械平台、嵌入式控制板以及视觉引导模块连接。
29.进一步的,无人自行车实验平台在环境中的移动分为自动和遥控两种模式,在自动模式下,通过视觉引导方式使得无人自行车实验平台在环境中自主移动,在遥控条件下,通过遥控器对无人自行车实验平台的移动进行控制。
30.本实用新型与现有技术相比,具有如下优点和有益效果:
31.1、本实用新型在无人自行车移动平台上安装了视觉引导模块,能够通过摄像头对环境进行感知,增强了系统的自主性和智能性。
32.2、本实用新型带有卡片电脑,可以通过网络进行远程登陆访问,相比于传统的嵌入式系统,用户能够更方便地进行编程和开发。
附图说明
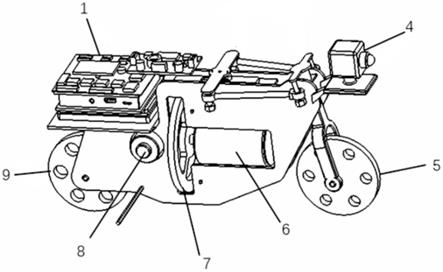
33.图1是本实用新型的整体结构示意图;
34.图2是本实用新型的电控模块的结构图;
35.图3是前轮转向系统的结构示意图;
36.图4是辅助平衡装置的结构示意图;
37.图5是后轮驱动系统的结构示意图;
38.图6是本实用新型各功能模块之间的关系图;
39.图7是本实用新型的工作程序流程图;
40.附图标号说明:1-电控模块;2-舵机;3-前叉;4-摄像头;5-前轮;6-平衡电机;7-平衡飞轮;8-减速电机;9-后轮;10-嵌入式控制板;11-电源管理模块;12-卡片电脑;13-电池。
具体实施方式
41.下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
42.实施例
43.如图1所示,本实用新型,一种带有平衡飞轮和视觉引导模块的无人自行车实验平台,包括机械平台、嵌入式控制板10、视觉引导模块、电源管理模块11以及电池13;
44.机械平台包括车身主体、前轮转向系统、辅助平衡装置、后轮驱动系统以及各个组成之间的固定和连接结构;
45.嵌入式控制板包括主控芯片、姿态传感器、电机控制模块以及通信接口;电机控制模块包括功率放大电路、编码器测速脉冲输入接口以及电流反馈采样电路;
46.主控芯片用于执行传感器信号处理和运动控制任务,包括无人自行车自身的平衡控制以及在环境中的移动方向控制;
47.姿态传感器用于测量无人自行车系统的横滚角,同时将测得得数据传输给主控芯片,作为平衡控制的反馈信号;
48.通信接口通过信号线与视觉引导模块连接并进行通信;
49.功率放大电路用于将主控芯片对平衡电机和减速电机的控制信号转化为对应的驱动电压,起到功率放大的作用;
50.编码器测速脉冲输入接口用于采集电机编码器的测速脉冲信号,获取电机转速,作为平衡控制和移动方向控制的反馈信号;
51.电流反馈采样电路用于将电机的电流信号通过采样电阻转化为电压信号,使得主控芯片能够通过测量电压信号计算电机的电流大小。
52.视觉引导模块由卡片电脑12和摄像头4通过数据线连接组成,用于获取和处理图像,实现对环境的感知,为无人自行车在环境中的移动提供引导信息。
53.摄像头直接与卡片电脑通信,通过连接件固定在车头上方。
54.视觉引导模块能够连接无线局域网络,用户能以远程登陆的方式在卡片电脑上编写视觉引导算法。
55.电源管理模块用于将电池的电压转换为稳定的标准电压,对机械平台、嵌入式控制板以及视觉引导模块进行供电。电池与电源管理模块的输入端通过导线连接,电源管理模块的输出端与机械平台、嵌入式控制板以及视觉引导模块连接。
56.嵌入式控制板10、视觉引导模块、电源管理模块11以及电池13组成电控模块1,电控模块通过螺丝、螺母以及铜柱固设在车身主题尾部。
57.在本实施例中,如图1、图2所示,电池通过胶带固定在车身主体的后部,为整个系统提供12.6v电压。卡片电脑通过螺丝和铜柱固定在电池上方,嵌入式控制板通过螺丝和铜柱固定在卡片电脑上方,电源管理模块固定在嵌入式控制板上方。其中,电源管理模块通过导线与电池相连,将12.6v电压转换成5v标准电压,为卡片电脑和嵌入式控制板供电。
58.如图3所示,本实施例中,前轮转向系统由舵机2、前叉3、前轮5以及连接结构组成,舵机固定在车身中部上方,通过连杆机构与前叉连接,前轮与前叉通过轴承连接,前轮转向系统用于控制无人自行车转向。
59.如图4所示,本实施例中,辅助平衡装置由平衡电机6和平衡飞轮7组成,平衡电机是一个不带有减速器的直流电机,通过螺丝和螺母固定在车身中部的镂空部分内,平衡飞轮通过螺丝和螺母固定在平衡电机的输出轴上,用于增大电机输出轴的转动惯量。辅助平衡装置通过平衡电机和平衡飞轮提供的反作用力矩调节车身平衡。
60.如图5所示,本实施例中,后轮传动系统由减速电机8、传动皮带和后轮9组成,设置与车身主体后部,用于驱动无人自行车前进或者后退。
61.本实施例中的各个功能模块之间的通信和驱动关系如图6所示。本实施例可以通过遥控器和接收机人工控制系统的移动。嵌入式控制板承担运动控制任务,包括平衡控制和运动方向控制,从姿态传感器中获得横滚角,从电机测速模块中获得电机转速。嵌入式控制板以串行通信的方式与卡片电脑通信,获得目标运动方向,同时控制平衡电机、减速电机和舵机实现控制功能。在自动模式下,由视觉引导模块负责进行环境感知和运动引导,摄像头负责获取图像,卡片电脑负责通过图像计算目标运动方向,并将目标运动方向发送到嵌入式控制板,引导无人自行车实验平台运动;在遥控模式下,视觉引导模块不工作,直接通过遥控器控制无人自行车实验平台的移动。
62.在本实施例中,视觉引导模块具体由树莓派3b型卡片电脑和csi摄像头组成,将摄像头通过软排线连接在卡片电脑的摄像头总线上,在卡片电脑上安装ubuntu16.04操作系统和python环境,通过opencv库函数实现图像处理,构成视觉引导模块,基于视觉实现环境感知。
63.在本实施例中,嵌入式控制板具体采用stm32f103c8t6作为主控芯片,采用mpu6050模块作为姿态传感器,采用四块btn7960s搭建两路h桥功率放大电路分别用于驱动平衡电机和减速电机,通过主控芯片向舵机的控制线输入pwm脉冲信号用于控制转向角。嵌入式控制器的编程采用交叉编译方式,在windows平台下通过c语言编程,将编译好的二进制代码通过st-link接口下载到主控芯片的flash上。
64.如图7所示,为本实施例的工作程序流程图。在各个模块完成开机初始化后,在嵌入式控制板的主控芯片的定时器触发条件下,进入程序循环,周期为2ms。具体为:
65.首先测量读取系统的各个状态和变量:用陀螺仪测量无人自行车实验平台的横滚角θ(t)和横滚角速度用电机编码器测量平衡电机的转速ωb(t)和车速v(t),从内存中读取横滚角平衡点的估计值和决定控制器切换的临界车速v0,接收卡片电脑下发的目标运动方向δ0(t)。对于δ0(t)的设定,在无人自行车实验平台处于遥控模式下,通过遥控器指令进行给定,在无人自行车实验平台处于自动模式下,通过视觉引导方式,通过计算路径跟踪偏差得到。
66.比较车速v(t)和临界车速v0=0.1m/s的大小,进行控制器的切换。
67.在v(t)>v0的条件下,仅通过控制舵机角度δ(t)维持平衡并进行运动方向控制,首先设置目标转向角δd(t),再根据如下公式计算目标横滚角θc(t):
[0068][0069]
其中的三个常数,b=0.16,g=9.81,h=0.08。
[0070]
关闭平衡电机,按照以下公式计算横滚角偏差θe(t)舵机转向角δ(t):
[0071][0072]
其中k
p
=26.0,ki=2.4,kd=8.5
[0073]
在0≤v(t)≤v0条件下,为了控制无人自行车实验平台的运动方向,设定舵机转向角跟随目标转向角δ(t)=δd(t),根据以下公式控制平衡电机的输入电压u
m1
(t):
[0074][0075]
其中,k1=63.2,k2=12.0,k3=2.5是人工设定的参数。θ(t)为横滚角,为横滚角速度,ωb(t)为平衡电机的转速。是横滚角平衡点的估计值,在运行过程中根据以下公式动态地计算:
[0076][0077]
其中,λ1=2.5和λ2=1.0是人工设定的参数。
[0078]
还需要说明的是,在本说明书中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0079]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其他实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1