基于行驶场景的行驶路线自动优化的制作方法
基于行驶场景的行驶路线自动优化
1.相关申请的交叉引用
2.本发明基于申请号为63/000,765、申请日为2020年3月27日、发明名称为“基于行驶场景的行驶路线自动优化”的美国临时专利申请提出,其全部内容在此以引入方式并入本发明。
技术领域
3.本发明主要涉及车辆行驶,尤其涉及基于至少一种行驶场景的行驶路线自动优化。
背景技术:
4.移动物体包括能够移动的物体,例如车辆(如汽车、卡车、公共汽车和电车)或移动设备(包括蜂窝设备和无线通信设备)。公共汽车或卡车等移动物体可用于提供服务,例如运送人员、产品或其他货物。此外,这种移动物体通常用于在特定的行驶路线上行驶。例如,车辆可能经常按照预定的时间表在路线上行驶,以接送或卸载乘客或货物。为车辆或其他移动物体生成最佳行驶路线是一项艰巨的任务。优化行驶路线面临的一个挑战是基于不同的行驶场景生成最佳行驶路线。
技术实现要素:
5.通过提供一种方法、计算机系统和/或计算机程序产品来优化车辆行驶路线,本发明克服了现有技术的缺点并提供了其他优点。一方面,一种机器实现的方法包括通过至少一个电子设备访问存储在至少一个存储器中的地理地图。可选地,在地理地图上设置一个或多个行驶区域,但不改变地理地图的底层结构,行驶区域被指定为优选的、受限的或禁止的行驶区域。在地理地图上提供了一个或多个路边通道场景,但不改变地理地图的底层结构,路边通道场景表示街道路段上每个行驶方向上的行驶偏好,并且对于街道路段的相反方向中的每一个方向,路边通道场景被指定为非优选、受限或禁止行驶。在地理地图上的一个或多个路口提供一个或多个机动操作场景,但不改变地理地图的底层结构,机动操作场景表示所述一个或多个路口的一个或多个可能的行驶方向,机动操作场景被指定为非优选、受限或禁止机动操作。将第一组的一个或多个行驶区域中的至少一个、一个或多个路边通道场景中的至少一个和一个或多个机动操作场景中的至少一个与第一行驶场景相关联。在至少一个电子设备上的地理地图上显示与第一行驶场景相关联的第一组的一个或多个行驶区域中的至少一个、一个或多个路边通道场景中的至少一个和一个或多个机动操作场景中的至少一个路边通道场景机动操作场景。处理器根据第一行驶场景(包括与其相关联的行驶区域、路边通道场景和机动操作场景)生成行驶路线。至少一个电子设备显示行驶路线以供车辆行驶。保存后,可以将行驶场景应用到以前存在的或新创建的行驶路线。
6.第一行驶场景可以基于但不限于以下一个或多个因素:时间、日期、影响交通的事件和道路建设。至少一个电子设备可以包括车辆内的电子设备。该方法还包括将第一行驶
场景存储在存储地理地图的至少一个存储器中。该方法还包括重写与第一行驶场景相关联的一个或多个行驶区域中的至少一个、一个或多个路边通道场景中的至少一个和一个或多个机动操作场景中的至少一个;基于重写与第一行驶场景相关联的一个或多个行驶区域中的至少一个、一个或多个路边通道场景中的至少一个和一个或多个机动操作场景中的至少一个,通过处理器生成修改的行驶路线;和在至少一个电子设备上显示修改的行驶路线以供车辆行驶。重写与第一行驶场景相关联的一个或多个行驶区域中的至少一个、一个或多个路边通道场景中的至少一个和一个或多个机动操作场景中的至少一个可以由车辆驾驶员或管理员执行。该方法还可以包括将第二组的一个或多个行驶区域的至少一个、一个或多个路边通道场景的至少一个和一个或多个机动操作场景中的至少一个与第二行驶场景相关联,第二组不同于所述第一组。在至少一个电子设备上的地理地图上显示与第二行驶场景相关联的第二组的一个或多个行驶区域的至少一个、一个或多个路边通道场景的至少一个和一个或多个机动操作场景中的至少一个。处理器根据第二行驶场景生成行驶路线,并且至少一个电子设备显示行驶路线以供车辆行驶。
7.另一方面,一种用于实现车辆行驶路线优化方法的计算机系统包括至少一个存储器。上述计算机系统还包括与至少一个存储器通信的一个或多个处理器。上述计算机系统用于执行该方法。
8.再一方面,一种用于实现车辆行驶优化路线的方法的计算机程序产品包括可由处理电路读取并存储用于执行该方法的指令的计算机可读存储介质。此外,本文还描述和要求保护与上述一个或多个方面有关的计算机实现的系统。此外,本文还描述了与上述一个或多个方面相关的服务,并要求保护这些服务。
9.通过本文描述的技术实现了其他特征和优点。本文详细描述了其他实施例和方面,并将其视为要求保护的一部分。
附图说明
10.在说明书结尾处的权利要求中,作为示例,特别指出和明确要求保护一个或多个方面。从下文结合附图的详细描述中,上述内容和一个或多个方面的目的、特征和优点是显而易见的,其中:
11.图1示出了根据本文描述的方面的地理地图的示例,该示例具有在地理地图上设置的行驶区域;
12.图2示出了根据本文描述的方面的图1中的地理地图的示例,该示例具有在地理地图上设置的路边通道场景;
13.图3示出了根据本文描述的方面的地理地图的示例,该示例具有在地理地图上设备的机动操作场景;
14.图4示出了根据本文描述的方面的地理地图的示例,该示例具有显示在地理地图上的第一行驶场景;
15.图5示出了根据本文描述的方面的地理地图和第一行驶场景的示例,其中至少一个行驶区域、至少一个路边通道场景和至少一个机动操作场景被重写并且生成修改的行驶路线;
16.图6示出了根据本文描述的方面的地理地图的示例,该示例具有显示在地理地图
上的第二行驶场景,并基于第二行驶场景生成了新的行驶路线;
17.图7示出了根据本文描述的方面的用于优化车辆行驶路线的方法的流程图的示例;
18.图8示出了根据本文描述的方面的流程图的示例,其中图4中示出的第一行驶场景相关联的至少一个行驶区域、至少一个路边通道场景和至少一个机动操作场景被重写,以基于上述重写的至少一个行驶区域、至少一个路边通道场景和至少一个机动操作场景生成修改的行驶路线;
19.图9示出了根据本文描述的方面的流程图的示例,其中选择与图4示出的第一行驶场景不同的第二行驶场景,生成新的行驶场景;
20.图10示出了根据本文描述的方面的系统的示例;
21.图11示出了图10所示系统的组件;和
22.图12示出了根据本文描述的方面的计算环境的示例,该计算环境可用于合并和执行用于优化车辆行驶路线的方法的一个或多个方面。
具体实施方式
23.现在将描述一些示例,以提供对本文所公开的方法、系统和设备的结构、功能、制造和使用原理的全面理解。附图中示出了一个或多个示例。本领域技术人员将理解,本文具体描述并在附图中示出的方法、系统和设备为非限制性示例,并且本发明的范围仅由权利要求限定。结合一个示例示出或描述的特征可以与其他示例的特征组合。这样的修改和变化将包括在本发明的范围内。
24.在本文(包括权利要求)中使用的术语“基本上”、“大约”、“大概”、“相对地”或其他类似术语用于描述和解释,例如,由于参考或参数在处理过程中发生变化而造成的微小波动。这种微小波动也包括来自参考或参数的零波动。例如,微小波动可以指小于或等于
±
10%,例如小于或等于
±
5%、小于或等于
±
2%、小于或等于
±
1%、小于或等于
±
0.5%、小于或等于
±
0.2%、小于或等于
±
0.1%或小于或等于
±
0.05%。
25.当跟踪物体或乘客的行驶路线时,例如对于乘坐校车的学生,有时可能需要修改路线,以确保行驶路线从出发点到最终目的地安全、高效并经过所有指定停靠点。例如,可以将其他的停靠点或路径段添加到行驶路线中,以满足新分配的物体或乘客的其他上车或下车请求。改变属性(例如交通模式、天气、车辆事故等)也可能需要“实时”修改行驶路线,同时仍保持路线安全、高效并包含所有先前计划的停靠点。
26.行驶场景包括行驶区域、路边通道场景和/或机动操作场景的相关组合,其有助于确定地理地图内的车辆行驶路线。行驶区域表示通过地理地图内的各个区域的行驶偏好。路边通道场景表示地理地图中各街道路段上行驶方向的行驶偏好。机动操作场景表示地理地图中街道路口(或交叉点)的行驶方向的行驶偏好。
27.本发明的一些方面允许用户将自定义场景应用于地图,地图仅在生成路线和方向时选择或激活该场景时影响寻路。选定的行驶场景不会永久更改底层地图属性。例如,通过根据本发明的软件应用程序创建行驶场景时,该应用程序可以使用地图和地图中的属性,但不会成为地图的一部分。相反,该行驶场景可以在地图上提供并显示行驶区域、路边通道场景和/或机动操作场景,但不在地图内。例如,行驶场景可以是设置在基础地图层之上的
地图层,该层使用地图作为参考,但不会改变地图。
28.可以创建多个行驶场景以用于相同的地图,每个场景具有独特的设置。本发明的各方面可以作为可选属性包括在内,可选属性可应用于路线或行程计划程序。行驶场景可能对应于行驶情况或条件,例如,白天行驶、夜间行驶或一天中的其他行驶时间、干燥、潮湿或下雪天气或其他天气条件、交通繁忙、车辆稀少或其他交通条件、夏季或冬季行驶等季节性行驶、学校上课与否、道路宽度、最大重量限额、能见度以及某些车辆是否可以通过某些街道。
29.一方面,可以随时改变行驶场景。更改后,将根据与新应用的行驶场景相关的设置重新评估行驶路线,同时使车辆能够到达行驶路线的停靠点。这可以利用一天中不同时间的交通模式的本地知识、天气变化、运输的个人或正在使用的车辆,帮助规划基于具体情况的路线。例如,第一行驶场景可以用于干燥天气行驶,而第二行驶场景可以用于在潮湿天气行驶。用户可以基于干燥天气选择第一行驶场景,然后,如果天气潮湿,则更改为第二行驶场景。发生这种情况时,系统将添加与第二行驶场景相关的设置,并相应地更改行驶路线。
30.在一个或多个方面,本发明可以在一种在一个或多个行驶场景中基于行驶区域、路边通道场景和/或机动操作场景自动生成移动物体的行驶路线。行驶路线是通过计算机系统自动生成的。移动物体可以包括移动设备,例如无线通信设备(如智能电话)和/或车辆,例如卡车、公共汽车(包括校车)、汽车和电车。
31.除了用于实时优化行驶路线之外,该系统还可用于在行驶之前优化行驶路线和/或基于移动物体的历史行驶和gps数据优化行驶路线。行驶路线包括指定由移动物体行进的路线。这样的行驶路线包括汽车路线、公共汽车路线、卡车路线和/或电车路线。计划的行驶路线的常见示例包括城市公交车公共交通路线和校车路线。
32.在其他方面,当根据本发明的软件应用程序首次打开地图时,该应用程序可以识别地图的现有属性,并基于这些底层的地图属性,自动生成一个或多个路边通道场景和一个或多个机动操作场景。然后,该应用程序可以根据生成的路边通道场景和机动操作场景创建默认行驶场景,并在地图上显示默认行驶场景。默认行驶场景不会更改地图的底层属性。可选地,该应用程序可以在地理地图第一次打开时生成一个或多个行驶区域。如果地图首次打开时没有生成行驶区域,则默认行驶场景不包含行驶区域。
33.用户无需更改默认设置就可以将其保存为行驶场景。此外,用户可以创建或编辑行驶区域或路边通道场景或机动操作场景,并将其保存为新的行驶场景。
34.该应用程序的算法可以将行驶场景的路边通道场景和机动操作场景指定为:“非优选”、“受限”或“禁止”。指定非优选路边通道场景表明对于街道路段上的车辆可用的任一行驶方向的效率成本没有差异,并且任一方向都是允许的。将路边通道场景或机动操作场景指定为“受限”则表明与车辆可用的其他路边通道或机动操作相比,车辆选择该设置的成本更高。禁止指定表明车辆路径不能穿过被禁止的路边通道或不能执行被禁止的机动操作。在这种情况下,效率成本是指车辆通过行驶路线所需的时间成本。
35.该应用程序的算法可以将行驶场景的行驶区域指定为:“优选”、“受限”或“禁止”。行驶区域的受限或禁止指定与路边通道场景或机动操作场景相同。也就是说,受限行驶区域表示车辆通过该行驶区域将是成本更高的选择,而禁止行驶区域表示车辆无法通过该行驶区域。然而,对于行驶区域的“优选”指定不同于对于路边通道场景或机动操作场景的“非
优选”指定。即,优选行驶区域表示通过优选行驶区域中的街道比通过备选路径成本更低,因此更有利。
36.可以提示希望创建行程的用户输入附加属性或改变地图上的现有属性,这会创建附加的非默认行驶区域、路边通道场景、机动操作场景和行驶场景。或者,用户可以选择不输入任何附加属性而仅使用默认行驶场景。
37.还可以提示用户从先前存储在存储器中的一个或多个行驶场景中进行选择,其中至少包括默认行驶场景。然后应用程序可以将选择的行驶场景与地图相关联。或者,可以提示用户选择可以自动应用行驶场景的行驶路线。
38.关于为移动物体生成行驶路线的其他细节将参考以下附图来描述。该系统或过程的各个方面可以由计算机系统来执行,该计算机系统包括在移动物体中的一个或多个处理器的计算机系统、与移动物体远程连接的一个或多个处理器、或由移动物体的处理器和与移动物体远程连接的处理器的组合,存在多种可能性。
39.图1示出了根据本文描述的方面的地理地图100的示例,该示例的地理地图100上具有并显示行驶区域102、104、106。地理地图100包括由街道路段108和路口110(即,两条或更多条街道相互连接或交叉的位置)组成的街道。此外,地理地图100可以包括其他特征,例如车辆停靠点112、114、116、学校118、住宅120或位于地理地图100边界内的其他物体。地理地图100上的各种特征可能与位置坐标(如gps和/或其他x-y坐标)相关联,这些坐标定义了特征在地图100上的位置。
40.地理地图100可以存储在至少一个电子设备的至少一个存储器中。电子设备可以是移动物体,例如在车辆中。或者,电子设备可以是车辆内的电子设备(例如车辆驾驶员使用的手机)。此外,电子设备可能不是移动物体或可能不在车辆中。相反,电子设备,例如,可以是固定的大型计算机、个人计算机、笔记本电脑、平板电脑或位于任何地方的服务器。地理地图100可以由与电子设备相关联的软件提供,并且显示在与电子设备相关联的用户界面上。
41.与电子设备相关联的软件可以使用户能够与地理地图100交互。例如,关于街道和街道路段、x-y坐标和地理地图100上的区域的属性可能与一个或多个行驶场景相关联。在行驶场景中,可以修改属性,以便创建的往返于出发点、停靠点(计划内和计划外)和目的地的车辆行驶路线(如图4的方向箭头122所示)遵循高效运输物体和/或乘客所需的规则和偏好。
42.用户可以通过,例如,在地理地图100上绘制形状或边界来创建任意数量的行驶区域(例如行驶区域102、104、106)。使用地理地图100创建的每个行驶区域102、104、106可指定为优选、受限或禁止的行驶区域。所有x-y坐标位于行驶区域边界内的特征(例如街道108和交叉口110)都将与该区域的指定相关联。
43.优选的行驶区域(例如行驶区域102)是在创建其他可能的行驶路线或行驶选项之前应该使用的区域。受限行驶区域(例如行驶区域106)是应该避免的区域。禁止行驶区域是永远不会用于创建行驶路线的区域。
44.确定行驶区域是否被指定为“受限”,可以根据加权比例进行计算。例如,如果一个行驶区域受到限制,则落在该区域内的任何街道路段都可以通过路由算法进行加权,并在车辆通过的效率方面成为成本更高的选择。路由算法可能会尝试使用受限行驶区域之外的
不同街道来修改车辆的行驶路线。如果修改后的行驶路线需要通过一组不同的街道,但效率成本等于或低于通过受限区域,则将使用修改后的行驶路线。如果没有可以让车辆以同等或更低成本到达目的地的替代行驶路线,则行驶路线将引导车辆通过受限行驶区域。正如将在图2(关于路边通道场景)和在图3(关于机动操作场景)中更详细地讨论的那样,受限制的路边通道和机动操作场景也可以根据加权比例进行计算,并且可以以与受限行驶区域类似的方式进行评估。
45.现有技术确定行驶路线的方法通常局限于指定为优选或禁止的行驶区域。然而,这种对行驶区域的概括性指定没有考虑到受限行驶区域,例如,如果其他替代路线效率较低,则可以通过受限行驶区域。在确定行驶路线时,对行驶区域使用至少三种类型的偏好指定(例如,优选、受限和禁止)可以提供比现有技术更高的效率水平。此外,与仅指定优选和禁止行驶区域的现有技术方法相比,通过得到的优化行驶路线花费的时间可能更少。此外,现有技术方法没有公开可应用于行驶区域的优选、受限和禁止指定的组合,或可应用于路边通道场景和机动操作场景的非优选、受限和禁止指定的组合。同样地,本发明包括技术和其他改进,可以产生比使用现有技术方法确定的行驶路线更快且更有效的改进行驶路线。
46.每一个优选的、受限的和禁止的行驶区域都可以用独特的视觉指示符来显示,以便用户能够识别。例如,优选行驶区域102可以显示为绿色、白色或无颜色,受限行驶区域106可以显示为黄色或交叉影线或包括多个x,禁止行驶区域104可以显示为红色或虚线。
47.图2示出了根据本文描述的方面的地理地图100的示例,该示例的地理地图100设置有的路边通道场景124、126、128。路边通道场景(如方向箭头124、126、128所示)表示在街道路段108上每个行进方向上的行驶偏好。对于街道路段的相反方向中的每一个,路边通道场景可以指定为非优选124、受限126或禁止128行驶。
48.根据本发明,确定是否指定路边通道场景为“受限”,可以通过路由算法根据加权比例进行计算。例如,如果路边通道受到限制,则可以通过路由算法对其进行计算和加权,使其成为比其他可用路边通道场景成本更高的选择。路由算法可能会尝试使用不同的路边通道来修改行驶路线。如果使用备用路边通道的修改后的行驶路线,需要通过一组不同的街道,但与通过受限路边通道行驶的效率成本相等或更低,则将使用修改后的行驶路线。如果没有其他可以让车辆以同等或更低成本到达目的地的行驶路线,车辆将使用受限路边通道。
49.每一个非优选、受限和禁止的路边通道场景都可以用独特的视觉指示符显示,以便用户识别。例如,非优选路边通道场景124可以以绿色、白色或无色的方向箭头显示,受限的路边通道场景126可以以黄色或交叉影线或部分黑色部分白色的方向箭头显示,而禁止的路边通道场景128可以以红色或虚线或完全黑色的方向箭头显示。
50.对于可以在任一方向或任一侧用于行驶路线(例如图4中的行驶路线122)的街道段上的行驶方向,可以指定非优选路边通道场景(例如路边通道场景124)。对于在所指示的一侧限制行驶的街道路段上的行驶方向,可以指定受限的路边通道场景(例如路边通道场景126)。禁止的路边通道场景(例如路边通道场景128)是禁止在指示的一侧行驶的街道路段。可以为街道路段的一侧或两侧设置非优选、受限或禁止的路边通道场景。
51.用户可以通过与电子设备相关联的用户界面来调整路边通道场景。例如,最初,地理地图100上的所有路边通道场景124、126、128可以设置为非优选,所有路边通道方向箭头
124、126、128可以显示为白色。此后,在方向箭头126上点击一次可以将设置改变为受限的,并且将方向箭头126的颜色改变为黄色。在方向箭头128上点击两次可以将设置改变为禁止,并且将方向箭头128的颜色改变为红色。
52.如果从出发点112、停靠点114(计划内或计划外)到目的地116创建行驶路线,则计算将生成最高效的路线,并且如果街道路段是双向街道,可以在任一方向通过具有非优选124的街道路段108。如果加权计算表明这是最高效的方向,则行驶路线也可以穿过受限街道路段126。行驶路线永远不会穿过禁止的街道路段128。
53.作为示例,如图2所示,即使路边通道场景126a将行驶路线指定为受限的街道路段方向,行驶路线也可以穿过街道路段108a。这是因为,唯一的其他替代方案是沿着街道路段108b穿过,该路段被路边通道场景128b指定为禁止的街道路段方向。
54.图3示出了根据本文描述的方面的地理地图100的示例,该示例的地理地图100设置并显示有机动操作场景130、132、134。机动操作场景(如方向箭头130、132、134所示)表示在一个或多个路口(或交叉口)110处的一个或多个可能的行驶方向。机动操作场景可被指定为非优选130、受限132或禁止134。
55.确定机动操作场景是否被指定为“受限”,可以根据加权比例进行计算。例如,如果机动操作场景是受限的,则可以通过路由算法对其进行计算和加权,使其成为比其他可用机动操作场景成本更高的选择。路由算法可能会尝试使用不同的机动操作场景来修改行驶路线。如果使用备用机动操作场景的修改后的行驶路线需要通过一组不同的街道,但成本等于或低于通过受限机动操作场景,则将使用修改后的行驶路线。如果没有修改后的行驶路线仍可以使车辆以同等或更低成本到达目的地,则该路径将使用受限机动操作。
56.每一个非优选、受限和禁止的机动操作场景都可以用独特的视觉指示符显示,以便用户识别。例如,非优选机动操作场景130可以以绿色、白色或无色的方向箭头显示,受限机动操作场景132可以以黄色或交叉影线或部分黑色和部分白色的方向箭头显示,而禁止的机动操作场景134可以以红色或虚线或完全黑色的方向箭头显示。
57.非优选机动操作场景(例如方向箭头130)是指行驶可以在任何方向上转向的交叉口,以计算从出发点112到停靠点114(计划内或计划外)和目的地116的行驶路线。非优选机动操作场景可以为交叉口110的所有可能方向设置。在单向街道的情况下,机动操作场景将只允许在允许的行驶方向上转向街道。
58.受限机动操作场景(例如方向箭头132)是行驶不应沿指示方向转向的交叉口。当计算从出发点112到停靠点114(计划的或计划外的)和目的地116的行驶路线时,软件可以避免使用受限的机动操作场景。可以为路口110的所有可能方向设置受限的机动操作场景。
59.禁止的机动操作场景(例如方向箭头134)是行驶永远不会沿指示方向转向的交叉口。在计算从出发点112到停靠点114(计划内或计划外)和目的地116的行驶路线时,软件将永远不会使用禁止的机动操作场景转弯。可以为路口110的所有可能方向设置禁止的机动操作场景。
60.机动操作场景可以由用户通过与电子设备相关联的用户界面来调整。例如,最初,地理地图100上的所有机动操作场景130、132、134可以设置为非优选,并且所有机动操作场景方向箭头130、132、134可以显示为白色。此后,在方向箭头132上点击一次可以将设置改变为受限,并将方向箭头132的颜色改变为黄色。在方向箭头134上点击两次可以将设置改
变为禁止,并将方向箭头134的颜色改变为红色。
61.当创建行驶路线时,计算将使用最高效的路线,并且可以在任一方向在具有非优选130的交叉口110处转弯(或转向)。如果加权计算表明这将是最高效的机动方式,则行驶路线也可以在受限方向132上转向。行驶路线永远不会在禁止方向134上转向。
62.图4示出了根据本文描述的方面的地理地图100的示例,该示例的地理地图100显示了第一行驶场景140的行驶路线。如果行驶区域102、104、106、路边通道场景124、126、128或机动操作场景130、132、134中的一个已被创建(如图1-3所示)并与行驶场景相关联(例如,用于“干燥天气”行驶的第一行驶场景140),则可以为包括初始出发点和最终目的地位置的选定计划内或计划外停靠点创建行驶路线。
63.在图4的示例中,任何创建的行驶区域102、104、106、路边通道场景124、126、128和机动操作场景130、132、134与第一行驶场景140(例如,“干燥天气行驶”)相关联。然而,行驶区域、路边通道场景或机动操作场景的特征的任意数量和组合可以与行驶场景相关联,只要行驶场景包括至少一个这样的特征。
64.与第一行驶场景140相关联的行驶区域102、104、106、路边通道场景124、126、128和机动操作场景130、132、134可以显示在至少一个电子设备上的地理地图100上。然后,与电子设备相关联的处理器可以根据第一行驶场景140生成行驶路线122(如图4所示)。然后,至少一个电子设备可以显示行驶路线122,以供车辆行驶。其中一个电子设备可以位于车辆中,而其他电子设备可以位于其他地方。例如,其他电子设备可能位于交通管理员的设备中,并且显示路线的其他电子设备可能由客户使用,例如乘客或其家人。
65.当根据第一行驶场景140从出发点112、停靠点114(计划内或计划外的)到目的地116创建行驶路线122时,处理器将基于上述设置计算最高效的路线。在图4所示的示例中,计算出的路线122穿过优选行驶区域102并避开受限行驶区域106和禁止行驶区域104。此外,行驶路线122还穿过街道路段108a,即使108a被方向箭头126a指定为受限街道路段方向。这是因为,唯一的其他替代方案将穿过街道路段108b,该路段被方向箭头128b指定为禁止的街道路段方向。最后,行驶路线122在每个交叉口110处仅采用非优选机动操作130,并避开受限机动操作132和禁止机动操作134。
66.行驶场景(例如第一行驶场景140)及其行驶区域102、104、106、路边通道场景124、126、128和机动操作场景130、132、134的特征可以基于许多属性。例如,它们可以基于一个或多个属性,包括但不限于天气、时间、日期、影响交通的事件、燃料状态和道路建设。一旦创建,第一行驶场景140及其相关行驶区域、路边通道场景和机动操作场景(还包括地理地图100)可以存储在至少一个存储器中。然而,行驶场景140可以作为独立于地理地图100的物体存储在至少一个存储器中。
67.图5示出了根据本发明描述的方面的地理地图100和第一行驶场景140的示例,其中行驶区域、路边通道场景或机动操作场景中的至少一个被重写并且生成修改的行驶路线144。如果第一行驶场景140所基于的属性(例如天气、施工、交通事故等)发生变化,则与第一行驶场景140相关联的行驶区域102、104、106中的至少一个、路边通道场景124、126、128中的至少一个,和机动操作场景130、132、134中的至少一个可能会被重写。一旦被重写,处理器可以基于重写后的场景来生成修改的行驶路线(例如行驶路线144)。然后可以在至少一个电子设备上显示修改后的行驶路线144以供车辆行驶。重写第一行驶场景140相关联的
行驶区域102、104、106中的至少一个、路边通道场景124、126、128中的至少一个,和机动操作场景130、132、134中的至少一个可以由车辆驾驶员或管理员执行。修改后的行驶路线144不会改变行驶场景140,并且行驶场景140仍可以被其他用户使用并用于其他行驶路线。
68.在图5的具体示例中,在街道108c上发生了交通事故142,使得被指定为非优选机动操作的机动操作场景130a被禁止。因此,一旦得知发生了事故,通过该路线的车辆管理员或驾驶员可以将命令输入到电子设备中以重写130a并且有效地将机动操作130a重新指定为禁止机动操作。然后系统的软件将生成修改的路线144。如图5所示,修改后的行驶路线144穿过受限行驶区域106并改为走街道108d,从而避开街道108c。虽然图5所示的具体示例重写了机动操作场景130a,但是行驶区域、路边通道场景和/或机动操作场景的任何数量或组合可以根据变化的条件进行重写。
69.图6示出了根据本文描述的方面的地理地图100的示例,该示例的地理地图100上显示了第二行驶场景150。随着条件(例如时间、天气、施工和交通)的变化,可以选择不同的行驶场景,以便根据这些变化的条件生成更高效的行驶路线。因此,例如,第二行驶场景可能是针对“下雪天气”的行驶条件。
70.因此,第二组的一个或多个行驶区域、一个或多个路边通道场景,和一个或多个机动操作场景可以与第二行驶场景150相关联。与第二行驶场景150相关联的第二组特征可以与第一行驶场景140相关联的第一组特征不同。例如,可能存在限制下雪天气的行驶区域,以及路边通道场景和/或机动操作场景。然后可以在至少一个电子设备上的地理地图100上显示与第二行驶场景150相关联的第二组行驶区域、路边通道场景和机动操作场景。然后,与电子设备相关联的处理器可以根据第二行驶场景150生成行驶路线146。然后,至少一个电子设备可以在,例如,用户界面的显示屏上显示行驶路线146,用于车辆行驶。
71.在图6所示的示例中,第二行驶场景中的行驶区域、路边通道场景和机动操作场景中的一部分有所不同。更具体地,关于行驶区域,图4中的禁止行驶区域104未在地理地图100中示出,因为它与第二行驶场景无关。相反,地理地图100上的优选行驶区域148与第二行驶场景相关联,并显示在地理地图100上。例如,当第一行驶场景是在“高峰时间”或交通拥挤的情况下,而第二行驶场景是在夜间行驶的情况下,就可能会发生这种情况。关于路边通道场景,为街道路段108d指定的不同路边通道场景124a与第二行驶场景相关联,机动操作场景130b也是如此。
72.根据第二行驶场景150生成的行驶路线146现在穿过第一行驶场景中禁止区域104曾经所在的区域,并且在街道108d上执行非优选左转机动操作130b。随后,行驶路线146沿非优选路边通道方向124a向前,穿过街道路段108d,通过新的优选行驶区域148,以到达其计划停靠点114。对于该示例,从停靠点114到最终目的地116,行驶路线146与使用第一行驶场景生成的原始行驶路线140相同。然而,基于行驶场景及其相关设置,针对特定行驶场景生成的行驶路线可能与其他行驶路线完全不同,即使行驶起点和终点可能相同。
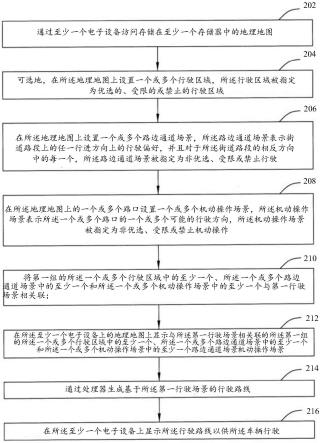
73.图7示出了根据本文描述的方面的用于优化车辆行驶路线的方法200的流程图的示例。方法200开始于步骤202,其中至少一个电子设备访问存储在与电子设备相关联的至少一个存储器中的地理地图100。地理地图100可以包括由街道路段108和交叉口110组成的街道。此外,地理地图100还可以包括其他特征,例如车辆停靠点112、114、116、学校118和住宅120。
74.在步骤204中,该方法可选地在地理地图100设置并显示一个或多个行驶区域102、104、106。行驶区域表示通过地理地图100的各个区域(或地区)的行驶偏好。行驶区域可以被指定为优选、受限或禁止的行驶区域。行驶区域是相关联的,因此可以与一个或多个行驶场景一起使用。当首次打开地理地图100时,可选地,根据本发明的软件应用程序可以提供一个或多个行驶区域。如果地理地图100首次打开时没有生成行驶区域,则默认行驶场景不包含行驶区域。
75.在步骤206中,在地理地图100内提供一个或多个路边通道场景124、126、128。路边通道场景表示在街道路段108上的每个行进方向上的行驶偏好。对于街道路段的相反方向中的每一个,路边通道场景可以被指定为非优选、受限或禁止行驶。路边通道场景是相关联的,因此可以与一个或多个行驶场景一起使用。
76.在步骤208中,在地理地图100内的一个或多个道路交叉点(或交叉口)110处提供了一个或多个机动操作场景130、132、134。机动操作场景表示在一个或多个路口的一个或多个可能的行驶方向。机动操作场景可以指定为非优选、受限或禁止机动操作。机动操作场景是相关联的,因此可以与一个或多个行驶场景一起使用。
77.在方法200的步骤210中,第一行驶场景140与第一组的行驶区域102、104、106、路边通道场景124、126、128和机动操作场景130、132、134的一个或多个特征相关联。第一行驶场景包括行驶区域、路边通道场景和/或机动操作场景的特征中的至少一个,并且可以是这些特征的任意数量的任意组合。
78.在步骤212中,与第一行驶场景140相关联的行驶区域、路边通道场景和机动操作场景被显示在至少一个电子设备上的地理地图100上。在方法200的步骤212中,处理器基于第一行驶场景140生成行驶路线122。在步骤214中,行驶路线122显示在至少一个电子设备上以供车辆行驶。
79.图8示出了根据本文所述的方面的方法220的流程图的示例,方法220用于重写与图7示出的第一行驶场景140相关联的行驶区域102、104、106中的至少一个、路边通道场景124、126、128中的至少一个,和机动操作场景130、132、134中的至少一个,以基于重写后的场景生成修改的行驶路线144。该方法220补充了图7中描述的方法200。
80.方法220开始于步骤222,其中与电子设备相关联的处理器生成修改的行驶路线144,该路线基于被重写的与第一行驶场景140相关联的行驶区域102、104、106中的至少一个,路边通道场景124、126、128中的至少一个,和机动操作场景130、132、134中的至少一个生成。重写可由车辆驾驶员或管理员执行。也可以实时执行重写。例如,如果行驶路线在地理地图100的某条街道上显示了优选机动操作,但车辆(例如公共汽车)的驾驶员看到发生了交通事故,基本阻塞了该街道,则驾驶员可以通过与电子设备关联的用户界面重写该机动操作。例如,驾驶员可以将该机动操作重新指定为受限的,而不是优选的。
81.在步骤224中,用于车辆行驶的修改的行驶路线144可以显示在至少一个电子设备上。修改后的行驶路线144不会改变行驶场景140,并且行驶场景140仍可以被其他用户使用,并用于其他行驶路线。
82.图9示出了根据本文所述的方面的方法230的流程图的示例,该方法230用于选择与第一行驶场景140不同的第二行驶场景150,以基于第二行驶场景150生成行驶路线146。该方法230补充了图7中描述的方法200。
83.方法230开始于步骤232,其中第二组的行驶区域102、104、106中的一个或多个、路边通道场景124、126、128中的一个或多个,和机动操作场景130、132、134中的一个或多个与第二行驶场景150相关联。与第二行驶场景150相关联的第二组特征可以不同于与第一行驶场景140相关联的第一组特征。基于行驶条件,将选择第二行驶场景150作为行驶场景。
84.在选择第二行驶场景之后,在步骤234中,与第二行驶场景150相关联的行驶区域、路边通道场景和机动操作场景可以显示在至少一个电子设备上的地理地图100上。在步骤236中,处理器基于第二行驶场景150生成行驶路线146。在步骤238中,用于车辆行驶的行驶路线146显示在至少一个行驶设备上。
85.图10和11示出了根据示例性实施例的用于优化车辆行驶路线的系统300的各个方面。系统300可以包括一个或多个处理器或服务器302,其中传输数据(或信息)304并且执行包括特定算法306的进程。在一个示例中,系统300可以通过云计算308来实现。系统300接收或获得信息304,其可以表示一个区域的电子地图。信息304还可以包括每条街道的坐标,包括街道路段和地图上的交叉口,以及车辆可能停靠的每个潜在停靠点的坐标。信息304还可以包括关于与街道路段、交叉口、停靠点和地图上的任何其他物体或特征相关联的各种属性的输入数据。
86.系统300还接收或获取关于行驶场景的信息304,以及构成行驶场景的行驶区域、路边通道场景和机动操作场景的特征。信息304可以由用户通过用户界面314输入到系统300中。这些用户可以是,例如,交通管理员、车辆驾驶员、车辆乘客等。该信息还可以通过,例如全球定位系统(gps)或气象卫星以电子方式传输到系统300。
87.信息304可包括与此类特征相关联或影响此类特征的属性。例如,大小、形状和位置等属性可能是与行驶区域相关的信息。此外,举例来说,诸如单向街道、交通模式、施工和时间之类的属性可能是与路边通道场景和机动操作场景相关的信息。信息304还可以包括行驶区域、路边通道场景和机动操作场景是否被指定为优选、受限或禁止。系统300还可操作以实时获取更新或修改的信息304,涉及行驶场景、行驶区域、路边通道场景或机动操作场景,例如,将行驶区域从受限重新指定为优选。
88.信息304可以通过任何可行的方法获得,包括从计算机或移动设备接收此类信息或从已存储在一个或多个存储设备中的gps数据生成该信息。该信息也可以由一个或多个用户310输入。其他获取信息的技术也可以用于创建、生成和/或获取信息。在系统300和与其相关联的存储器内,信息304可以以任何所需的格式存储。
89.由处理器302执行的过程或算法306可以使用信息304来生成结果312。结果312可以根据所选择的行驶场景和行驶路线、路边通道场景和机动操作场景的一个或多个组合,以电子方式表示和/或生成行驶路线。系统300还可以存储结果312,以供以后使用或分析。
90.可以使用户(例如,操作员、管理员、车辆驾驶员等)310能够在任何数量的用户界面314上查看结果312。还可以允许用户310通过用户界面314输入进一步的信息304,执行诸如修改流程或算法306这样的任务,以便编辑或进一步分析结果312。
91.生成的路线可以是系统优化路线,其考虑了第一方和第三方交通数据、天气数据、危险数据和/或避让区数据。此外,优化路线可以基于当前数据和/或历史数据。在一些实施例中,生成的路线可以包括主要路线和多条备用路线。可以根据完成每条路线的总距离、总时间或目标成本函数的总成本对备选路线进行优先级排序。
92.当使用实时数据进行操作时,系统可以由用户使用,例如交通主管,他们负责为车辆(包括诸如公共汽车、校车或电车或送货卡车的车队)生成行驶路线,以优化行驶路线。一旦确定了优化的行驶路线,用户就可以授权或允许某些车辆通过优化的行驶路线。或者,用户可以限制或禁止某些车辆通过其他行驶路线。
93.此外,该系统可以由公共汽车或电车的用户使用,例如在公共交通路线中。例如,当诸如公共汽车或电车之类的移动物体被分配从初始出发目的地行驶到最终目的地时,用户可以基于不同的行驶场景来优化行驶路线。移动设备可以显示一个或多个车辆的计划行驶路线以及已经分配给该路线的车辆(如上文所述)。
94.此外,当系统使用历史行驶数据或历史gps数据操作时,系统的用户可以使用系统根据与需要行驶的地理区域和各种行驶场景相关的历史数据来生成行驶路线。该系统可以将移动物体移动过程中的移动数据和gps数据存储为历史数据。在这方面,历史gps数据随时间的推移而累积,并存储在系统中或远程存储。历史gps数据可用于对移动物体和计划的行驶路线进行数据分析,以确定不同行驶场景中的行驶区域、路边通道和机动操作场景。
95.参考图12,描述了计算机系统的一个示例,该计算机系统包括可由本发明的一个或多个方面使用的处理器。在该示例中,计算机系统是计算环境的一部分,包括本发明的各个方面可能使用或可能不使用的附加组件。
96.如图12所示,公开了一种可用于执行本发明的过程的计算环境400。计算环境包括,例如,以通用计算设备的形式示出的计算机系统402。计算机系统402可包括但不限于一个或多个处理器或处理单元404(例如,中央处理单元(cpu))、存储器406(又名系统存储器、主内存、主存储器、中央存储器或存储器),以及一个或多个输入/输出(i/o)接口408,上述组件通过一个或多个总线和/或其他连接410彼此连接。
97.总线410表示几种类型的总线结构中的任何一种或多种,包括使用各种总线体系结构中的任何一种的存储器总线或存储器控制器、外围总线、加速图形端口以及处理器或局部总线。作为示例而非限制,这样的架构包括行业标准体系结构(isa)、微通道体系结构(mca)、增强型isa(eisa)、视频电子标准协会(vesa)局部总线和外围组件互连(pci)。
98.存储器406可以包括,例如,高速缓存420(例如共享高速缓存),高速缓存420可以连接到处理器404的本地高速缓存422。此外,存储器406可以包括一个或多个程序或应用程序430、操作系统432,以及一个或多个计算机可读程序指令434。计算机可读程序指令434可以用于执行本发明各方面的实施例的功能。
99.计算机系统402还可以经由,例如,i/o接口408与一个或多个外部设备440、一个或多个网络接口442和/或一个或多个数据存储设备444进行通信。示例外部设备包括用户终端、磁带驱动器、指向设备、显示器等。网络接口442使计算机系统402能够与一个或多个网络(例如局域网(lan)、通用广域网(wan)和/或公共网络(例如互联网))进行通信,提供与其他计算机设备或系统的通信。例如,系统可以连接到个人计算机、平板设备或智能手机,以通过图形用户界面将移动物体的分配或未分配状态传达给用户。
100.数据存储设备444可以存储一个或多个程序446、一个或多个计算机可读程序指令448和/或数据等。计算机可读程序指令可以配置为执行本发明各方面的实施例的功能。
101.计算机系统402可以包括和/或连接到可移除/不可移除、易失性/非易失性计算机系统存储介质。例如,它可以包括和/或连接到不可移动的非易失性磁性介质(通常称为“硬
盘驱动器”)、用于读取和写入可移动的非易失性磁盘的磁盘驱动器(例如,“软盘”)和/或用于读取或写入可移动的非易失性光盘的光盘驱动器(例如,cd-rom、dvd-rom或其他光学介质)。应该理解,其他硬件和/或软件组件可以与计算机系统402结合使用。示例包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid系统、磁带驱动器和数据档案存储系统等。
102.计算机系统402可以与许多其他通用或专用计算系统环境或配置一起操作。可能适合与计算机系统402一起使用的众所周知的计算系统、环境和/或配置的示例包括但不限于:个人计算机(pc)系统、服务器计算机系统、瘦客户端、胖客户端、手持或笔记本电脑、多处理器系统、基于微处理器的系统、机顶盒、可编程消费电子产品、网络pc、小型计算机系统、大型计算机系统以及包括任何上述系统或设备的分布式云计算环境等。
103.一个或多个处理器和/或计算机系统或计算环境的其他方面可以远离移动物体设置。此外,在一个特定示例中,根据本发明的一个或多个方面,处理器(例如处理器404)可以执行一个或多个机器学习引擎和/或其他引擎,以基于训练和学习为移动物体提供最佳行驶路线或路径。这些引擎可以存储在在包括主存储器和/或一个或多个高速缓存的存储器和/或外部存储器中,并且可以在一个或多个处理器上执行。存在多种变化。
104.本发明的一个或多个方面与计算机技术和/或技术领域的改进密不可分。
105.一个或多个方面涉及云计算。应理解的是,尽管本发明包括云计算的详细描述,但是本文叙述的教导的实施方式不限于云计算环境。相反,本发明的实施例能够与现在已知或以后开发的任何其他类型的计算环境结合实现。
106.云计算是服务交付的模型,用于实现对可配置计算资源(例如网络,网络带宽、服务器、处理器、内存、存储器、应用程序、虚拟机和服务)共享池的便捷、按需网络访问,可以通过最少的管理工作或与服务提供者的交互来快速地进行配置和发布。该云模型可以包括至少五个特征、至少三个服务模型和至少四个部署模型。
107.特征如下:
108.按需自助服务:云消费者可以自动根据需要单方面提供计算功能,例如服务器时间和网络存储,而无需与服务提供商进行人工交互。
109.广泛网络接入:该功能可通过网络获得,并通过标准机制进行接入,这些机制可促进异构瘦客户机或胖客户机平台(例如,移动电话、便携式计算机和pda)的使用。
110.资源池化:使用多租户模型对提供商的计算资源进行池化以用于为多个消费者提供服务,并根据需求动态分配和重新分配不同的物理和虚拟资源。一般情况下,消费者不能控制或甚至并不知晓所提供资源的确切位置,但是可以在较高抽象级别上(例如,国家、州或数据中心)指定位置,因此具有位置无关性。
111.快速弹性:可以快速且弹性地配置功能(在某些情况下是自动的),以实现快速向内或向外发布。对于消费者而言,供应的可用功能似乎是无限的,并且可以在任何时间购买任何数量的功能。
112.可计量服务:云系统通过在某种程度上适合服务类型(例如,存储、处理、带宽和当前用户帐户)的抽象级别上利用计量功能来自动控制和优化资源使用。可以监视、控制和报告资源使用情况,从而为所使用服务的提供者和使用者提供透明度。
113.服务模型如下:
114.软件即服务(saas):提供给消费者的功能是使用在云基础架构上运行的提供商的应用程序。可通过诸如网络浏览器(例如,基于网络的电子邮件)之类的瘦客户端界面从各种客户端设备访问应用程序。消费者不管理或控制底层的云基础架构,包括网络、服务器、操作系统、存储,甚至单个应用程序功能,可能只有有限的用户特定的应用程序配置设置例外。
115.平台即服务(paas):提供给消费者的功能是部署到云基础架构的由消费者创建或获取的应用程序,该应用程序使用提供商提供的编程语言和工具创建。消费者不管理或控制包括网络、服务器、操作系统或存储在内的底层云基础架构,但可以控制已部署的应用程序以及可能的应用程序托管环境配置。
116.基础设施即服务(iaas):提供给消费者的功能是提供处理、存储、网络和其他基本计算资源,其中消费者能够部署和运行任意软件,这些软件可以包括操作系统和应用程序。消费者不管理或控制底层云基础架构,但可以控制操作系统、存储、已部署的应用程序,并且可能对某些网络组件(例如,主机防火墙)进行有限的控制。
117.部署模型如下:
118.私有云:云基础架构仅由组织运营。它可以由组织或第三方管理,并且可以存在于场内部署或场外部署。
119.社区云:云基础架构由多个组织共享,并支持具有共同关注点(例如,任务、安全需求、政策和合规性注意事项)的特定社区。它可以由组织或第三方管理,并且可以存在于场内部署或场外部署。
120.公共云:云基础架构可供公众或大型工业集团使用,并由销售云服务的组织所拥有。
121.混合云:云基础架构由两个或更多云(私有云、社区云或公共云)组成,这些云仍然是独立实体,但通过标准化或专有技术绑定在一起,从而实现数据和应用程序的可移植性(例如,针对云间均衡负载的云爆技术)。
122.云计算环境是面向服务的,着重于无国界、低耦合、模块化和语义互操作性。云计算的核心是包含互连节点网络的基础架构。
123.本发明的各个方面可以是处于任何可能的技术细节结合的系统、方法和/或计算机程序产品。该计算机程序产品可以包括计算机可读存储介质(媒介),其上具有使处理器执行本发明的各个方面的计算机可读程序指令。
124.计算机可读存储介质可以是有形设备,其可以保留和存储由指令执行设备使用的指令。计算机可读存储介质可以是,例如但不限于,电子存储设备、磁存储设备、光存储设备、电磁存储设备、半导体存储设备或前述设备的任何合适的组合。计算机可读存储介质的更具体示例的非穷举列表包括以下内容:便携式计算机磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦可编程只读存储器(eprom或闪存)、静态随机存取存储器(sram)、便携式光盘只读存储器(cd-rom)、数字多功能磁盘(dvd)、记忆棒、软盘、机械编码设备例如打孔卡或上面记录有指令的凹槽中的凸起结构,以及上述内容的任何适当组合。如本文所使用的,计算机可读存储介质不应被理解为瞬时信号本身,例如无线电波或其他自由传播的电磁波、通过波导传播的电磁波或其他传输介质(例如,通过光纤电缆的光脉冲)或通过电线传输的电信号。
125.本文所述的计算机可读程序指令可以从计算机可读存储介质下载到相应的计算/处理设备,或者可以经由网络(例如,互联网、局域网、广域网和/或无线网络)下载到外部计算机或外部存储设备。该网络可以包括铜传输电缆、光传输光纤、无线传输、路由器、防火墙、交换机、网关计算机和/或边缘服务器。每个计算/处理设备中的网络适配器卡或网络接口从网络接收计算机可读程序指令,并转发计算机可读程序指令以存储在各个计算/处理设备内的计算机可读存储介质中。
126.用于执行本发明的操作的计算机可读程序指令可以是汇编程序指令、指令集架构(isa)指令、机器指令、机器相关指令、微代码、固件指令、状态设置数据,用于集成电路的配置数据,或以一种或多种编程语言(例如angular、html、css、.net framework、c#和microsoft sql server),包括面向物体的编程语言(例如smalltalk,c++)等等,以及诸如“c”编程语言或类似编程语言之类的过程编程语言的任何组合编写的源代码或目标代码。计算机可读程序指令可以完全在用户计算机上、部分在用户计算机上或作为独立软件包执行,也可以部分在用户计算机上并且部分在远程计算机上或完全在远程计算机或服务器上执行。在后一种情况下,远程计算机可以通过任何类型的网络(包括局域网(lan)或广域网(wan))连接到用户计算机,或者可以与外部计算机建立连接(例如,通过互联网使用互联网服务提供商)。在一些实施例中,电子电路(包括,例如可编程逻辑电路、现场可编程门阵列(fpga)或可编程逻辑阵列(pla))可以通过利用计算机可读程序指令的状态信息来执行计算机可读程序指令,以定制电子电路,从而执行本发明的各个方面。
127.在此参考根据本发明实施例的方法、设备(系统)和计算机程序产品的流程图和/或框图描述了本发明的各个方面。可以理解,流程图图示和/或框图的每个框以及流程图图示和/或框图中的框的组合可以由计算机可读程序指令来实现。
128.这些计算机可读程序指令可以提供给通用计算机、专用计算机或其他可编程数据处理设备的处理器,以产生机器,使得经由计算机的处理器或其他可编程数据处理设备执行的指令创建用于实现流程图和/或框图方框中指定的功能/动作的方法。这些计算机可读程序指令还可以存储在计算机可读存储介质中,该计算机可读存储介质可以指导计算机、可编程数据处理设备和/或其他设备以特定方式运行,从而使得其中存储有指令的计算机可读存储介质包括一种文本,该文本包括实现流程图和/或方框图或多个方框中指定的功能/动作的各个方面的指令。
129.计算机可读程序指令还可以加载到计算机、其他可编程数据处理设备或其他设备上,以使得在计算机、其他可编程设备或其他设备上执行一系列操作步骤以产生计算机实现的流程,使得在计算机、其他可编程设备或其他设备上执行的指令实现流程图和/或框图方框中指定的功能/动作。
130.附图中的流程图和框图示出了根据本发明的各个实施例的系统、方法和计算机程序产品可能实现的架构、功能和操作。在这方面,流程图或框图中的每个方框可以表示指令的模块、片段或部分,这些指令包括一个或多个可执行指令,用于实现指定的逻辑功能。在一些替代实施方式中,方框中指出的功能可以不按图中指出的顺序发生。例如,取决于所涉及的功能,实际上可以基本上同时执行连续示出的两个方框,或者有时可以以相反的顺序执行这些方框。还应注意,框图和/或流程图示图的每个方框以及框图和/或流程图示图中的方框的组合,可以由特殊用途的基于硬件的系统来实现,该系统执行指定功能或作用或
执行特殊用途的硬件和计算机指令的组合。
131.除上述内容之外,提供客户环境管理的服务提供商还可以提供、给予、部署、管理、服务一个或多个方面。例如,服务提供商可以创建、维护、支持为一个或多个客户执行一个或多个方面的计算机代码和/或计算机基础架构。作为回报,作为示例,服务提供商可以根据订购和/或费用协议从客户处接收付款。另外或可替代地,服务提供商可以从向一个或多个第三方销售广告内容中接收付款。
132.一方面,可以部署应用程序以执行一个或多个实施例。作为一个示例,应用程序的部署包括提供可操作的计算机基础架构,以执行一个或多个实施例。
133.另一方面,可以部署包括将计算机可读代码集成到计算系统中的计算基础架构,其中该代码结合计算系统能够执行一个或多个实施例。
134.再一方面,可以提供一种用于集成计算基础架构的过程,该过程包括将计算机可读代码集成到计算机系统中。该计算机系统包括计算机可读介质,其中该计算机介质包括一个或多个实施例。与计算机系统结合的代码能够执行一个或多个实施例。
135.尽管以上描述了各种实施例,但是这些仅是示例。例如,可以使用不同类型的无人机,以及其他类型的神经网络和/或进化算法。可能有多种变化。
136.此外,其他类型的计算环境可以提供益处并被使用。作为示例,适用于存储和/或执行程序代码的数据处理系统是可用的,其包括至少两个通过系统总线直接或间接连接到存储元件的处理器。存储元件包括,例如,在程序代码的实际执行期间使用的本地存储器、大容量存储和高速缓冲存储器,其提供至少一些程序代码的临时存储,以便减少在执行过程中必须从大容量存储中检索代码的次数。
137.输入/输出或i/o设备(包括但不限于键盘、显示器、指针设备、dasd(直接存取存储器)、磁带、cd、dvd、拇指驱动器和其他存储介质等)可以直接或通过中间i/o控制器连接到系统。网络适配器也可以连接到系统,以使数据处理系统能够通过中间的专用或公共网络连接到其他数据处理系统或远程打印机或存储设备。调制解调器、电缆调制解调器和以太网卡只是网络适配器的几种可用类型。
138.本文所使用的术语仅出于描述特定实施例的目的,而无意于进行限制。如本文所使用的,单数形式“一”、“一个”和“该”也旨在包括复数形式,除非上下文另外明确指出。还将理解的是,在本说明书中使用时,术语“包括”规定了所述特征、整数、步骤、操作、元件和/或组件的存在,但不排除存在或添加一个或多个其他特征、整数、步骤、操作、元素、组件和/或其组合。
139.所附权利要求中的所有方法或步骤以及功能元件的相应结构、材料、动作和等同物(如果有的话)旨在包括用于与其他要求保护(如明确要求的那样)的元件组合在一起执行功能的任何结构、材料或动作。已经出于说明和描述的目的给出了一个或多个实施例的描述,但并非意在穷举或限于所公开的形式。对于本领域普通技术人员而言,许多修改和变型将是显而易见的。选择和描述实施例是为了更好地解释各个方面和实际应用,并使本领域的其他普通技术人员能够理解具有适用于所设想的特定用途的各种修改的各种实施例。
140.应当理解,上述概念和本文更详细讨论其他概念的所有组合(只要这些概念不相互矛盾)都被视为本文公开的发明主题的一部分,并实现本文所述的益处和优点。特别地,出现在本发明末尾的要求保护的主题的所有组合都被认为是本文公开的发明主题的一部
分。
141.尽管已经通过参考具体示例描述了本发明,但是应当理解,在所描述的发明概念的精神和范围内可以做出许多改变。因此,本发明不限于所描述的示例,而应具有所附权利要求的语言所定义的全部范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1