异常设备判断系统的制作方法
1.本发明涉及异常设备判断系统。本发明主张2020年5月29日提交的日本专利申请号2020-093852的优先权,对于承认基于文献参照的引用的指定国,将该申请中记载的内容通过参照而引入至本技术中。
背景技术:
2.专利文献1中,公开了对于存在多个驱动设备的打印机的各驱动设备的异常,根据预先已获取的正常状态的各驱动设备的电流值、和运行过程中(运行中)逐次获取的整体的消耗电流,判断各驱动设备的异常的技术。
3.现有技术问题
4.专利文献
5.专利文献1:日本特开2008-76292号
技术实现要素:
6.发明要解决的技术问题
7.在上述专利文献1中,在多个驱动设备中电流波形发生了变化的情况下,难以利用相减而根据运行中总电流波形求取各驱动设备的运行中电流波形。
8.本发明的目的在于在降低了运行中所需的传感成本的状态下,根据总电流波形检测任意的多个耗电装置的异常。
9.用于解决技术问题的技术手段
10.本技术包括用于解决上述技术问题的至少一部分的多个技术手段,举其一例,如下所述。
11.本发明的一个方式是一种异常设备判断系统,其特征在于,包括:存储部,其用于存储基准波形,该基准波形按时间序列分别记录了供给至正常动作时耗电的耗电装置的电流、和供给至对多个所述耗电装置供给电力的控制电路板的电流;按时间序列获取运行(运用)时供给至所述控制电路板的电流的电流获取部;异常判断部,其使用所述电流获取部获取到的供给至所述控制电路板的电流、和所述基准波形,计算每个所述耗电装置的电流变化率,判断所述耗电装置的异常;和显示所述异常判断部进行判断而得到的结果的判断结果显示部。
12.发明的效果
13.根据本发明,能够在降低了运行中所需的传感成本的状态下,根据总电流波形检测任意的多个耗电装置的异常。
14.上述以外的技术问题、结构和效果将通过以下实施方式的说明而变得明白。
附图说明
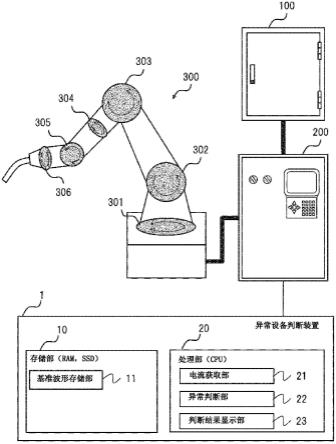
15.图1是表示异常设备判断装置和对象装置的例子的图。
16.图2是表示异常设备判断的对象装置的电源系统电路的例子的图。
17.图3表示每个电动机的一个制造工序的电流的波形的例子。
18.图4是表示总电流波形的例子的图。
19.图5是表示异常判断处理的流程的例子的流程图。
20.图6是表示异常设备判断装置的结构例的框图。图6的(a)是表示与学习时相关的结构的例子的框图,图6的(b)是表示与运行时相关的结构的例子的框图。
21.图7是举例表示运行时的电流波形的图。图7的(a)表示获取的总电流波形,图7的(b)表示将个别设备的电流波形累计得到的曲线图的例子。
22.图8是表示运行时的每个电动机的一个制造工序的电流的波形的例子的图。
23.图9是表示异常判断处理(第一实施例)的处理流程的例子的图。
24.图10是使用计算出的变化率推断个别设备电流波形的图。
25.图11是表示判断结果显示部显示的变化率的显示画面的例子的图。
26.图12是表示异常判断处理(第二实施例)的处理流程的例子的图。
27.图13是推断异常时的个别设备电流波形的图。
28.图14是表示判断结果显示部显示的变化率的显示画面的例子的图。
29.图15是表示异常判断处理(第三实施例)的处理流程的例子的图。
30.图16是表示判断结果显示部显示的变化率的显示画面的例子的图。
31.图17是表示异常判断处理(第四实施例)的处理流程的例子的图。
32.图18是表示总电流波形与各个个别设备电流波形的关系的例子的图。图18的(a)表示获取的总电流波形,图18的(b)表示将个别设备的电流波形累计得到的曲线图的例子。
33.图19是使用计算出的变化率推断个别设备的电流波形的图。
34.图20是表示总电流波形与各个个别设备电流波形的关系的例子的图。图20的(a)表示获取的总电流波形,图20的(b)表示将个别设备的电流
×
电压比的曲线图累计了的例子。
35.图21是表示第五实施例的对象装置的电源系统电路的例子的图。
36.图22是表示异常判断处理(第五实施例)的处理流程的例子的图。
37.图23是表示总电流波形与各个个别设备电流波形的关系的例子的图。图23的(a)表示获取的总电流波形,图23的(b)是表示将根据电压比换算得到的个别设备的电流
×
电压比的曲线图累计了的例子的图。
38.图24是表示第六实施例的对象装置的概要结构的图。
39.图25是表示数值控制金属加工机的电源系统电路的概要的结构例的图。
40.图26是表示异常判断处理(第六实施例)的处理流程的例子的图。
41.图27是表示异常设备判断装置的硬件结构例的图。
具体实施方式
42.在以下实施方式中,为了便于说明而在必要时分割为多个部分或实施方式进行说明,但除了特别指出的情况以外,它们并非互不相关,而是处于一方是另一方的部分或全部的变形例、详细说明、补充说明等的关系。
43.另外,在以下实施方式中,在提及要素的数量等(包括个数、数值、量、范围等)的情
况下,除了特别指出的情况和原理上明确限定为特定数量的情况等以外,都不限定于该特定数量,也可以是特定数量以上或以下。
44.进而,在以下实施方式中,其构成要素(也包括要素步骤等)除了特别指出的情况和原理上明确认为必需的情况等以外,都不是必需的。
45.同样,在以下实施方式中,在提及构成要素等的形状、位置关系等时,除了特别指出的情况和原理上明确认为并非如此的情况等以外,都包括实质上与其形状等近似或类似的形状等。这一点对于上述数值和范围也是同样的。
46.另外,在用于说明实施方式的全部附图中,对于相同的部件原则上赋予相同的附图标记,省略其反复说明。以下,对于本发明的各实施方式使用附图进行说明。
47.以往,工业设备中存在被电动机驱动的多个设备,存在用称为编码器的检测器获取电动机的实际的旋转状态、改变对电动机的控制输入值而高精度地进行控制的技术。利用这样的控制输入值与实际的状态相应地变化的机制,使用电流传感器从外部获取控制输入值中的特别是电流值等,判断电动机的异常状态。
48.这样的技术中,在从电动机使用减速机等的齿轮传递旋转的情况下,能够判断该齿轮的异常状态。近年来的机器人、公知机械等工业设备中在一个设备内存在多个驱动部、对其分别用电动机进行控制的情况并不少见。因此,可以考虑通过对于各驱动部获取电流值的方法,能够判断每个驱动部的异常。
49.但是,在判断搭载了多个的电动机等驱动设备的异常时,如果在各驱动设备安装电流传感器等传感器,则除了传感器自身成本之外,对于各驱动设备还需要将模拟的传感器数据转换为数字信号的模拟-数字转换器、和用于读取数字信号的记录装置,随之需要这些装置成本,传感成本升高。
50.在上述专利文献1记载的系统中,在应用前设置学习阶段,测量并存储各驱动设备的电流,在运行中用传感器仅测量作为各驱动设备的消耗电流的总和的存在于各驱动设备的源头的控制电路板的消耗电流(此后称为总电流)而检测异常。
51.在这样的技术中,在计算对象驱动设备的电流波形时,通过从运行中测量得到的总电流减去除对象驱动设备以外的其他驱动设备的电流,得到对象驱动设备的运行中的电流波形。在异常判断时,对得到的对象驱动设备的运行中电流波形、与预先存储的对象驱动设备的电流波形进行比较,进行判断。
52.但是,本方法中存在两个缺点。第一点是在多个驱动设备中电流波形同时变化了的情况下,难以利用相减根据运行中总电流波形求取各驱动设备的运行中电流波形。第二点是即使仅在一个驱动设备中电流波形变化,也只能将最初发生异常的驱动设备作为对象。
53.在以下实施例中,因为都支持了实际的装置可能采取的各种结构,所以作为异常设备判断系统具有较高的通用性,这是优点。
54.图1是表示异常设备判断装置和对象装置的例子的图。对象装置包括控制盒200、和机器人部300而构成。对象装置的电源是从配电柜(配电板)100获取的。机器人部300中,存在多个工作轴,第一工作轴301、第二工作轴302、第三工作轴303、第四工作轴304、第五工作轴305、第六工作轴306分别能够在箭头方向上旋转运动。能够认为各工作轴是在正常工作时耗电的耗电装置。控制盒200对机器人部300的动作进行控制。
55.异常设备判断装置1与对象装置的控制盒200连接。异常设备判断装置1包括存储部10、和处理部20。在存储部10中,具有存储作为基准的波形的基准波形存储部11。更具体而言,存储部10存储分别以时间序列记录了对耗电装置供给的电流、和对将电力供给至多个耗电装置的控制电路板供给的电流的基准波形。
56.处理部20中,包括电流获取部21、异常判断部22、和判断结果显示部23。电流获取部21经由后述的电流传感器,按时间序列获取对控制电路板220供给的电流。异常判断部22判断获取的电流值有无异常。判断结果显示部23显示异常判断部22判断的结果。
57.图27是表示异常设备判断装置的硬件结构例的图。异常设备判断装置1能够用包括中央处理装置(central processing unit:cpu)2、存储器3、硬盘装置(hard disk drive:hdd)等外部存储装置4、对于cd(compact disk)、dvd(digital versatile disk)等便携的存储介质5读取信息的读取装置6、键盘、鼠标、条形码读取器等输入装置7、显示器等输出装置8、和经由互联网等通信网络与其他计算机通信的通信装置9的通常的计算机、或者包括多个该计算机的网络系统实现。另外,读取装置6当然也可以不仅进行便携的存储介质5的读取,还能够写入。
58.例如,处理部20中包括的电流获取部21、异常判断部22、判断结果显示部23能够通过将外部存储装置4中存储的规定程序载入至存储器3中由cpu2执行而实现,存储部10能够通过cpu2使用存储器3或外部存储装置4而实现。
59.该规定程序也可以经由读取装置6从便携的存储介质5下载至外部存储装置4、或者经由通信装置9从网络下载至外部存储装置4,之后载入至存储器3中由cpu2执行。另外,也可以经由读取装置6从便携的存储介质5直接载入至存储器3、或者经由通信装置9从网络直接载入至存储器3中,由cpu2执行。
60.图2是表示异常设备判断的对象装置的电源系统电路的例子的图。从配电柜100经由控制盒200内,对机器人部300内的作为驱动用电动机的各电动机供给电力。机器人部300中包括多个驱动用电动机,各个驱动用电动机的旋转被传递至减速机,进而使设置在其前端的工作轴动作。减速机是使输入的旋转速度减小、反而使转矩增大的机构。
61.在图2的例子中,控制盒200中包括电源电路210、和控制电路板220,从配电柜100供给的电力被传递至电源电路210,通过控制电路板220供给至各电动机。控制电路板220能够对多个耗电装置供给电力。关于驱动用电动机,在机器人部300搭载了第一电动机321、第二电动机322、第三电动机323、第四电动机324、第五电动机325、和第六电动机326。
62.对于各驱动用电动机,分别连接了第一减速机311、第二减速机312、第三减速机313、第四减速机314、第五减速机315、和第六减速机316。另外,对于各减速机,分别连接了第一工作轴301、第二工作轴302、第三工作轴303、第四工作轴304、第五工作轴305、和第六工作轴306。
63.图3表示每个电动机的一个制造工序的电流的波形的例子。本发明所示的电流波形,记载了从交流波形中提取包络线得到的波形,但在包络线以外也能够使用有效值、或者使用从交流成分变换得到的转矩电流值等。机器人部300构成为,根据与规定的动作程序相应地从控制电路板220输出的电流的大小、频率驱动与各工作轴连接的电动机而使其动作。因此,已知这些电流波形是反映机器人的各工作轴的电动机、作为与电动机连接的机械部件的减速机、工作轴的劣化状态的重要的物理量。
64.电流波形501是与第一工作轴301连接的第一电动机321的电流的波形。同样,电流波形502、电流波形503、电流波形504、电流波形505、电流波形506分别是与第二工作轴302连接的第二电动机322的电流的波形、与第三工作轴303连接的第三电动机323的电流的波形、与第四工作轴304连接的第四电动机324的电流的波形、与第五工作轴305连接的第五电动机325的电流的波形、与第六工作轴306连接的第六电动机326的电流的波形。
65.图4是表示总电流波形的例子的图。总电流波形601是从配电柜100经由电源电路210流入控制电路板220的电流波形,总电流波形详情602表示总电流波形601内的各轴的明细。
66.总电流波形601和总电流波形详情602是相等的电流波形,表示各工作轴的电流的总和与总电流相等,用下式(1)表达。其中,i
w(t)
表示某时刻t的总电流,i
i(t)
表示某时刻t的各工作轴电流(此后作为包括工作轴、减速机、电动机的状态的物理量而称为个别设备电流),i表示工作轴的编号。
67.[数1]
[0068]iw(t)
=i
1(t)
+i
2(t)
+i
3(t)
+i
4(t)
+i
5(t)
+i
6(t)
……
(1)
[0069]
以上,着眼于电流,但能够仅着眼于电流的条件是在各部位电压恒定(一定),电流与电功率(电力)成正比例关系。在现有例子和后述的本发明的第一~第三实施例中,使用电压恒定(电压一定)这一条件为前提。
[0070]
<现有技术的例子>
[0071]
接着,对于现有技术的异常设备判断装置的结构例,为了对比而使用图5~图8进行说明。在图5中用流程图形式表示现有技术的异常设备判断装置的处理的流程的例子,在图6中表示现有技术的例子和本发明的异常设备判断装置的框图。
[0072]
图6的(a)是表示异常设备判断装置1的与学习时相关的结构的例子的框图,图6的(b)是表示异常设备判断装置1的与运行时相关的结构的例子的框图。在学习时,异常设备判断装置1的处理部20中包括的电流获取部21,从总电流用传感器701获取总电流值。总电流用传感器701设置在配电柜100与电源电路210之间的配线、或者设置在电源电路210与控制电路板220之间的配线。
[0073]
另外,在学习时,电流获取部21从轴1电流用传感器702至轴6电流用传感器703获取各轴(个别设备)的电流值。轴1电流用传感器702至轴6电流用传感器703分别设置在控制电路板220与各电动机之间的配线。
[0074]
用电流获取部21获取电流值时,电流获取部21将全部波形作为基准波形存储在基准波形存储部11中。存储的基准波形是电流波形501至电流波形506这样的波形,需要满足各工作轴的电流的总和与总电流相等这样的关系。
[0075]
电流获取部21分析过去的故障记录与电流数据的相关性,使用规定的算法运算并设定用于判断为故障(异常)的指标(异常度)及其阈值。
[0076]
在运行时,异常设备判断装置1的处理部20中包括的电流获取部21与学习时同样地从总电流用传感器701获取总电流值。总电流用传感器701与学习时同样地设置在配电柜100与电源电路210之间的配线、或者设置在电源电路210与控制电路板220之间的配线。
[0077]
电流获取部21将获取的总电流交给异常判断部22,异常判断部22从基准波形存储部11获取基准波形而判断总电流是否相当于异常。判断结果显示部23在异常判断部22判断
为异常时,确定该消息和异常的工作轴,生成显示信息,在未图示的设备判断装置1的显示器等显示。
[0078]
此处,在基于现有技术的运行时的处理中,异常判断部22根据获取的运行中的总电流波形推断进行异常判断的对象设备的电流波形。在该处理中,基于下式(2)所示的数学式进行计算。其中,括号内下标0表示学习时的电流波形,括号内下标t表示运行时的某时刻。另外,下式(2)是将异常的检测对象作为第一工作轴的情况下的例子。
[0079]
[数2]
[0080]i1(t)
=i
w(t)-i
2(0)-i
3(0)-i
4(0)-i
5(0)-i
6(0)
……
(2)
[0081]
即,在进行基于现有技术的异常判断时,通过从当前的总电流中减去学习时的对象以外的个别设备的电流波形,计算当前的对象设备、即个别设备的电流波形。
[0082]
图7是举例表示在基于现有技术的异常判断中获取的运行时的电流波形的图。在图7的(a)中,示出了所获取的总电流波形611,在图7的(b)中,示出了用上式(2)求得的个别设备1的电流波形612的例子。
[0083]
图8表示运行时的每个电动机的一个制造工序的电流的波形的例子。图8所示的例子与图3所示的学习时的例子基本相同,但第一工作轴301的电流波形511与电流波形501不同。在此情况下,为了用现有技术检测异常,第二工作轴302~第六工作轴306的运行时的电流波形512~516需要是与学习时的电流波形502~506分别相同的波形。在波形不同的情况下,不能正确地获取第一工作轴301的电流波形511,也不能认为异常判断是正确的判断。即,不能检测多个设备的异常。
[0084]
图5是表示现有技术的异常判断处理的流程的例子的流程图。该流程由步骤s001~s009构成,学习时的处理是步骤s001~s003的处理,运行时的处理是步骤s004~s009的处理。
[0085]
首先,电流获取部21获取总电流和各轴(个别设备)的电流(步骤s001)。具体而言,电流获取部21从总电流用传感器701获取总电流值,从轴1电流用传感器702至轴6电流用传感器703获取各轴(个别设备)的电流值。
[0086]
然后,电流获取部21存储各轴的电流波形(学习时个别电流波形)(步骤s002)。具体而言,电流获取部21将全部波形作为基准波形存储在基准波形存储部11中。
[0087]
然后,电流获取部21设定判断为异常的异常度(相关系数)的阈值(步骤s003)。具体而言,电流获取部21分析过去的故障记录与电流数据的相关性,使用规定的算法运算并设定用于判断为故障(异常)的指标(异常度)及其阈值。以上是学习时的处理流程。
[0088]
接着,电流获取部21获取1个工序的总电流波形(运行时总电流)(步骤s004)。具体而言,电流获取部21从总电流用传感器701获取总电流值。
[0089]
然后,异常判断部22从获取到的运行时总电流中,使用异常检测对象以外的各轴的基准波形进行排除(步骤s005)。具体而言,异常判断部22从基准波形存储部11获取基准波形,从总电流中减去。
[0090]
然后,异常判断部22计算从基准波形看到的提取波形的异常度(步骤s006)。具体而言,异常判断部22计算提取出的波形与学习时的基准波形的相关系数,计算异常度。
[0091]
然后,异常判断部22判断异常度是否在阈值以上(步骤s007)。具体而言,异常判断部22判断在步骤s006中计算出的相关系数是否在步骤s003中设定的异常度的阈值以上。
[0092]
在异常度并非阈值以上的情况(步骤s007中“否”的情况)下,异常判断部22判断为正常,为了使处理进行至下一工序的异常检测而使控制返回步骤s004(步骤s008)。
[0093]
在异常度为阈值以上的情况(步骤s007中“是”的情况)下,异常判断部22判断为异常(步骤s009)。
[0094]
以上是异常判断处理(现有技术)的处理内容的例子。
[0095]
<第一实施例>
[0096]
接着,使用图9~图11,说明本发明的第一实施例。在第一实施例中,结构与上述现有技术基本相同,但存在差异。以下,以该差异为中心进行说明。
[0097]
图9是表示异常判断处理(第一实施例)的处理流程的例子的图。学习时的处理中,在存储各轴的电流波形之后,电流获取部21设定变化率的阈值作为判断为异常的异常度(步骤s103),这一点与现有技术不同。具体而言,电流获取部21分析过去的故障记录与电流数据的相关性,将用于判断为故障(异常)的指标作为电流波形的变化率,使用规定的算法运算并设定其阈值。
[0098]
然后,在运行时的处理中,获取1个工序的总电流波形之后,异常判断部22对于获取到的运行时总电流进行多变量分析、例如多元回归分析(multiple regression analysis),计算各轴的电流波形的变化率(步骤s105)。具体而言,首先假定全部工作轴(个别设备)与学习时相比都发生了变化,异常判断部22构建下式(3)所示的式子。其中,α1~α6是表示各个个别设备的电流波形变化了的比例的变化率,在该处理时刻是未知数。
[0099]
[数3]
[0100]iw(t)
[0101]
=α1×i1(0)
+α2×i2(0)
+α3×i3(0)
+α4×i4(0)
+α5×i5(0)
+α6×i6(0)
[0102]
……
式(3)
[0103]
上式(3)中,存在6个未知数(α1~α6)。本实施例中作为对象的异常,是将该未知数为在一个工序内不发生变化的值作为条件的。即,条件是在异常时波形整体成为αi倍。如果是该条件,则在工序内的各时刻上式(3)成立。因此,例如在如图3所示的15秒的工序中,如果每隔1秒获取了电流值,则能够改变t的值而生成15个上式(3)。
[0104]
因为对于6个未知变化率存在15个式子,所以在联立方程的观点上能够说能够求解变化率α1~α6。这样,假定所有个别设备都发生变化,使用作为求解多个未知数的方法的多元回归分析进行处理,这是本实施例的特征。另外,本实施例中,异常判断部22通过利用了满足供给至多个耗电装置的电流与电流变化率之积的总和等于供给至控制电路板的电流之条件的多元回归分析,计算电流变化率。
[0105]
在异常率(变化率)为阈值以上的情况(步骤s007中“是”的情况)下,异常判断部22判断为异常,判断结果显示部23在显示部显示变化率α1~α6(步骤s109)。
[0106]
图10是使用计算出的变化率推断得到个别设备电流波形的图。各个个别设备电流波形用下式(4)表示。
[0107]
[数4]
[0108]ii(t)
=α1×ii(t)
……
式(4)
[0109]
具体而言,图10所示的轴3的电流波形523与图8所示的运行时的电流波形513相比,变化率是α3倍。
[0110]
图11是表示判断结果显示部显示的变化率的显示画面的例子的图。变化率αi取“1”作为初始值,此时的电流波形与图3所示的学习时电流波形相同,与学习时个别设备波形相同。
[0111]
显示画面800中,包括按照各个工作轴按工序单位表示变化率的推移的曲线图801。此处,图11的各曲线图内记载的变化率α
ib
,表示在图9所示的第一实施例的流程图内的步骤s103中设定的异常度的阈值。图11内的曲线图801的1个绘图表示1个工序,对于流程图的步骤s004~步骤s007的每次处理生成一个绘图。
[0112]
对以上进行总结,异常判断部22使用电流获取部21获取到的供给至控制电路板的电流和基准波形、通过多变量分析计算每个耗电装置的电流变化率,在电流变化率超过阈值时判断为耗电装置异常。另外,判断结果显示部23显示异常判断部22进行了判断的结果。
[0113]
本实施例中如图11所示,能够通过多变量分析得知轴1和轴3同时变化的状况,能够得到这样的效果,即,能够进行现有技术中未能作为对象的多个设备的异常判断的效果。另外,还能够得到如下效果,即,能够通过判断结果显示部23观察即使未判断为异常也逐渐向异常转移的状况的效果。以上是本发明的第一实施例。
[0114]
<第二实施例>
[0115]
接着,使用图12~图14,说明本发明的第二实施例。第二实施例中,结构与上述第一实施例基本相同,但存在差异。以下,以该差异为中心进行说明。
[0116]
图12是表示异常判断处理(第二实施例)的处理流程的例子的图。学习时的处理与第一实施例相同。运行时的处理中,在获取1个工序的总电流波形之后,通过多变量分析计算变化率,但在该处理中,设定时间窗口,从运行时总电流波形和基准波形中截取规定期间的部分数据,进行多次多变量分析,在这点上不同。即,按规定时间窗口将基准波形划分为多个区间,按每个区间计算电流变化率并判断异常。
[0117]
如第一实施例所说明的那样,为了用多变量分析(多元回归分析)计算变化率α1~α6而要构建的式(3)的个数,是未知数的数量(α1~α6的情况下是6个)以上即可,例如如果在15秒的工序中每隔1秒记录了电流值,则仅用6秒的量的数据就能够计算变化率αi。即,只要连续的取样数为工作轴的数量以上就能够进行多元回归分析。
[0118]
在第二实施例中,令学习时的数据是图3所示的电流波形,异常时的电流波形是图13所示的状态。但是,实际的处理中,并不从传感器获取图13所示的电流波形组,此处仅为了说明而记载。
[0119]
具体而言,异常判断部22首先按最小时间宽度(时间窗口)对运行时总电流波形进行分割并提取(步骤s205)。最小时间宽度在上述例子中是能够确保未知数的数量的样本的6秒,但不限于此,也可以在其以上。然后,异常判断部22按步骤s205中使用了的最小时间宽度(时间窗口)对学习时总电流波形进行分割并提取(步骤s206)。
[0120]
然后,异常判断部22用多元回归分析计算各轴、各时间电流的变化率(步骤s207)。具体而言,异常判断部22计算根据所设定的时间窗口内的样本确定的变化率。
[0121]
通过上述步骤s205~s207的处理,每6秒就用多元回归分析计算变化率,所以能够获取图14所示的变化率的工序内推移。因为变化率是每次偏移1秒地获取6秒的数据而计算出的,所以虽然是离散的但描绘出如正弦波那样的平滑的曲线。样本数量越少,则会得到越动态的变化率的反应。
[0122]
图14是表示判断结果显示部显示的变化率的显示画面的例子的图。显示画面810中,包括按照各个工作轴以时间单位表示变化率的推移的曲线图811。如曲线图811所示,在第一工作轴301中变化率仅在工序内的前半上升,在第三工作轴303中变化率仅在工序内的后半上升,能够得知局部的异常。
[0123]
根据第二实施例的发明,即使是在工序内并非均匀地表现出异常状态、而是在工序内部分地表现出的异常状态,也能够精度良好地得知。特别是,在一个工序耗费的时间较长的情况下,能够大幅提高异常的检测精度。
[0124]
<第三实施例>
[0125]
接着,使用图15、图16,说明本发明的第三实施例。第三实施例中,结构与上述第一实施例基本相同,但存在差异。以下,以该差异为中心进行说明。
[0126]
图15是表示异常判断处理(第三实施例)的处理流程的例子的图。学习时的处理与第一实施例基本相同,但在判断为异常的异常度的阈值以外,也根据学习时的电流波形的偏差(变动),计算不应当判断为异常的异常度的第二阈值,实现判断精度的提高。即,根据供给至控制电路板的电流的基准波形确定成为规定的是否检测异常的指标的阈值(第二阈值),在电流变化率不超过第二阈值的情况下不判断为异常,由此防止错误判断。
[0127]
具体而言,在步骤s103中进行了异常度的阈值设定之后,作为学习时的处理,根据学习时电流波形设定考虑了偏差的第二异常度阈值(步骤s304)。因为本发明中根据总电流推断各个个别设备电流,所以在总电流中发生了偏差的情况下,担心各个个别设备电流的推断精度也产生偏差。用于避免该状况的条件是,各个个别设备电流的变化量比总电流的偏差大,能够用下式(5)表示。其中,si
w(0)
表示学习时总电流波形的偏差。
[0128]
[数5]
[0129]
αi×ii(0)
>i
i(0)
+si
w(0)
……
式(5)
[0130]
将上式(5)变形,令考虑了偏差的异常度阈值为α
ia
时,α
ia
能够用式(6)表示。
[0131]
[数6]
[0132][0133]
用式(6)求得的α
ia
,在运行时的异常度的判断处理中,使用于在检测出超过异常度和第二异常度阈值两者时判断为异常的处理(步骤s307)。即,能够将供给至控制电路板220的电流的基准波形的变动量与供给至耗电装置的电流之和除以供给至该耗电装置的电流得到的商,确定为第二异常度阈值。
[0134]
图16是表示判断结果显示部显示的变化率的显示画面的例子的图。显示画面820中,包括对于各个工作轴按工序单位表示变化率的推移的曲线图821。此处,图16的各曲线图内记载的变化率α
ib
表示在图15所示的第三实施例的流程图内的步骤s103中设定的异常度的阈值。变化率α
ia
表示在图15所示的第三实施例的流程图内的步骤s304中设定的第二异常度阈值。图16内的曲线图821的1个绘图表示1个工序,按照流程图的步骤s004~步骤s307的每个处理生成一个绘图。
[0135]
例如,关于第一工作轴,因为变化率超过了异常度的阈值和第二异常度阈值这两个阈值,所以能够判断为异常。但是,关于轴3,处于超过了α
ib
、但尚未超过α
ia
的状态。如果没有设定α
ia
,则此时会判断为第三工作轴异常,但实际上存在总电流的偏差引起误报的可
能性。在本实施例的发明中,具有减少这样的总电流的偏差等突发的现象引起的误报的效果。
[0136]
另外,作为第三实施例的发明发挥的其他效果,在个别设备电流相对于总电流偏差较小、担心即使发生了异常也被淹没在偏差内的情况下,能够以预先仅对该个别设备设置电流传感器的方式采取对策。即,这是还能够用于优化传感器数的指标,可以说能够发挥在维持精度的情况下适当地减少传感器数量的效果。
[0137]
<第四实施例>
[0138]
接着,使用图17~图20,说明本发明的第四实施例。第四实施例中,结构与上述第一实施例基本相同,但存在差异。以下,以该差异为中心进行说明。
[0139]
图17是表示异常判断处理(第四实施例)的处理流程的例子的图。第四实施例中,加入了供给至各个个别设备的电压不同的情况下的对策。具体而言,电流获取部21在学习时用多元回归分析计算作为各个个别设备与源头的电源电压之比的电压比(步骤s403),存储各轴的个别电压比(步骤s404),由此在供给至个别设备的电压不同的情况下,也能够无需获取电压值地计算电压比。
[0140]
图18是表示第四实施例中作为判断异常的对象的总电流波形与各个个别设备电流波形的关系的图。图18(a)是总电流的曲线图,图18(b)是将各个个别设备的电流波形累计得到的曲线图的例子。对图18(a)与图18(b)进行比较,总电流与各个个别设备电流的总和并不一致。这意味着,因为电压在各个个别设备不同,所以用单纯的电流波形的相加不能表示总电流。
[0141]
在第一实施例中,原本因为电功率(电力)的总和等于总电功率、电压恒定这样的假定,所以电流的关系式成立。在本实施例中使用本来的电功率的总和相等的关系式。此处,说明求取上述电压比的方法。电压比ki是下式(7)所示的物理量。其中,vw表示总电流获取部位的电压,vi表示各个个别设备电流获取部位的电压。
[0142]
[数7]
[0143][0144]
使用上式(7)的关系,用式(8)表示各个个别设备电压比与电流的关系。
[0145]
[数8]
[0146]iw(0)
[0147]
=k1×i1(0)
+k2×i2(0)
+k3×i3(0)
+k4×i4(0)
+k5×i5(0)
+k6×i6(0)
[0148]
……
式(8)
[0149]
通过在学习时电流波形的各时刻构建式(8),并进行多元回归分析,能够计算各个个别设备电压比ki。
[0150]
图19是使用计算出的变化率推断个别设备的电流波形的图。使用计算出的各个个别设备电压ki计算各个个别设备电流波形时,能够得到图19的第一工作轴的波形541、第二工作轴的波形542、第三工作轴的波形543、第四工作轴的波形544、第五工作轴的波形545、和第六工作轴的波形546。各曲线图的纵轴是电流
×
电压比。
[0151]
图20是表示总电流波形与各个个别设备电流波形的关系的例子的图。图20的(a)表示获取得到的总电流波形,图20的(b)表示将个别设备的电流
×
电压比的曲线图累计了
的例子。对图20的(a)与图20的(b)进行比较,曲线图的大小相等。此处,用下式(9)表示在图17的流程图内的s405中实施的多元回归分析中使用的数学式。
[0152]
[数9]
[0153]iw(t)
[0154]
=α1×
k1×i1(0)
+α2×
k2×i2(0)
+α3×
k3×i3(0)
+α4×
k4×i4(0)
+α5×
k5×i5(0)
+α6×
k6×i6(0)
[0155]
……
式(9)
[0156]
在使用上式(9)时,因为已计算出各个个别设备电压比ki,所以能够没有问题地执行多元回归分析。
[0157]
这样,根据第四实施例,即使在不知道各个个别设备的电压是否相等的情况下,也能够通过使用式(8)而无需增加电压传感器地计算电压比,所以能够在维持精度的情况下应用于个别设备的电压不同的装置。即,能够扩大可应用的装置的范围。
[0158]
<第五实施例>
[0159]
接着,使用图21~图23,说明本发明的第五实施例。第五实施例中,结构与上述第一实施例基本相同,但存在差异。以下,以该差异为中心进行说明。
[0160]
图21是表示第五实施例的对象装置的电源系统电路的例子的图。对于第一~第四实施例的结构,在控制电路板220中进而增加了冷却风扇231、232、无励磁电磁制动器330等设备(构成要素)。
[0161]
图22是表示异常判断处理(第五实施例)的处理流程的例子的图。第五实施例中,通过将主要构成要素以外的个别设备、学习时等暂时性地难以测量的其他设备集中地一并处理,而无需进行其他设备单体的测量就能够进行异常设备判断。
[0162]
基本而言,第五实施例的异常判断处理的处理流程,与第四实施例的异常判断处理的处理流程相同。但是,在学习时,电流获取部21用多元回归分析按每个轴计算个别电压比和常数(步骤s503),将常数(残差)视为其他设备的电流而存储电流波形(步骤s504)。
[0163]
即,在第五实施例的异常判断处理中,用常数i
else(0)
表达、计算在求取个别电压比ki时没有测量的个别设备的电流。在下式(10)中示出个别电压比ki及其他个别设备电流i
else(0)
的关系式。
[0164]
[数10]
[0165]iw(0)
[0166]
=k1×i1(0)
+k2×i2(0)
+k3×i3(0)
+k4×i4(0)
+k5×i5(0)
+k6×i6(0)
+i
else(0)
[0167]
……
式(10)
[0168]
此处,i
else(0)
是包括图21的冷却风扇231、232、无励磁电磁制动器330的消耗电流的值。
[0169]
无励磁电磁制动器330是机器人中一般应用的制动器。该制动器具有在没有被供给电力时处于施加了制动的状态、在被供给电力时不施加制动这样的特征。因此,具有在通电时消耗固定的电力这样的特征,图21内的虚线箭头仅表示了制动的作用方向。能够用上式(10)构建多元回归分析所需的联立方程式,计算电压比ki、和其他个别设备电流i
else(0)
。
[0170]
图23是表示总电流波形、和将根据电压比换算得到的各个个别设备的电流
×
电压比的曲线图累计而得到的曲线图的关系的例子的图。图23的(a)表示学习时的总电流,图23
的(b)表示将使用按上式(10)求得的电压比ki换算得到的各个个别设备电流
×
电压比和其他个别设备电流i
else(0)
累计得到的曲线图。对图23的(a)与图23的(b)进行比较,双方的曲线图的大小相等。
[0171]
此处,用式(11)表示图22的流程图内的多元回归分析中使用的数学式。
[0172]
[数11]
[0173]iw(t)
[0174]
=α1×
k1×i1(0)
+α2×
k2×i2(0)
+α3×
k3×i3(0)
+α4×
k4×i4(0)
+α5×
k5×i5(0)
+α6×
k6×i6(0)
+α
else
×ielse(0)
[0175]
……
式(11)
[0176]
在使用式(11)时,因为已计算出各个个别设备电压比ki,所以能够没有问题地执行多元回归分析,虽然分辨率差,但能够使用其他个别设备电流变化率α
else
检测其他个别设备的异常。即,电流获取部21对于没有在存储部10中存储基准波形而从控制电路板220接受电力供给的耗电装置,能够一并视为耗电装置并计算电压比和变化率。
[0177]
根据本实施例,具有即使在主要设备以外还包括多个个别设备的情况下也能够精度良好地判断异常的效果。另外,即使在其他个别设备在一个工序内变化的情况下,通过利用同一工序的多个波形且使用平均值,也能够使用上式(10)、(11),能够发挥同样的效果。
[0178]
<第六实施例>
[0179]
接着,使用图24~图26,说明本发明的第六实施例。第六实施例中,结构与上述第一实施例基本相同,但存在差异。以下,以该差异为中心进行说明。
[0180]
图24是表示第六实施例的对象装置的概要的结构例的图。第六实施例的对象装置是4轴动作(x轴431、y轴432、z轴433、主轴434)的数值控制金属加工机400,作为附属也附带了交换工具461的工具交换器(工具交换轴475)。
[0181]
图25是表示数值控制金属加工机的电源系统电路的概要的结构例的图。控制装置401中,包括电源电路410、第一控制电路板411、第二控制电路板412和第三控制电路板413。电源电路410从配电柜100接受电力供给。各控制电路板被从电源电路410供给电力。各控制电路板分别附带有个别设备。
[0182]
第一控制电路板411附带有第一电动机451、使其旋转减速的第一减速机441、和因由第一减速机441传递的力而在x轴方向上滑动动作的台x轴431。另外,第一控制电路板411附带有第二电动机452、使其旋转减速的第二减速机442、和因由第二减速机442传递的力而在y轴方向上滑动动作的台y轴432。另外,第一控制电路板411附带有第三电动机453、使其旋转减速的第三减速机443、和因由第三减速机443传递的力而在z轴方向上滑动动作的工具z轴433。
[0183]
第二控制电路板412附带有第四电动机454、使其旋转减速的第四减速机444、和因由第四减速机444传递的力而旋转动作的主轴434。
[0184]
第三控制电路板413附带有第五电动机495、使其旋转减速的第五减速机485、和因由第五减速机485传递的力而旋转动作的工具交换轴475。
[0185]
图26是表示异常判断处理(第六实施例)的处理流程的例子的图。第六实施例中,即使在电源分支地供给至控制电路板的情况下,也能够在各处进行个别设备的电流推断以及异常判断。
[0186]
基本而言,第六实施例的异常判断处理的处理流程与第一实施例的异常判断处理的处理流程相同。但是,在学习时,电流获取部21获取总电流和各控制电路板、附带个别设备的电流(步骤s601),将各控制电路板、各个个别设备的电流波形存储在基准波形存储部11中(步骤s602)。然后,在运行时,异常判断部22在获取1个工序的总电流波形(步骤s004)之后,通过多元回归分析计算各控制电路板电流的变化率(步骤s605),用计算出的变化率计算、获取各控制电路板电流(步骤s606),通过多元回归分析计算各个个别设备电流的变化率(步骤s607)。即,存在控制电路板时作为嵌套结构而进行递归处理。
[0187]
即,第六实施例中,对上述第一~第五实施例所示的控制电路板与个别设备的关系进行扩展,进而在多个控制电路板与电源电路之间也应用该关系,推断从源头的电流经由控制电路板的个别设备的变化率。
[0188]
此处,对于从电源电路410经由第一控制电路板411的台x轴431、台y轴432、工具z轴433的电流波形推断的流程进行具体的说明。
[0189]
图25中,令配电柜100与电源电路410之间的配线中流过的电流为总电流i
w(t)
,令电源电路410与各控制电路板之间的配线中流过的电流为各控制电路板电流i
ci(t)
,令第一控制电路板411与第一~第三电动机之间的配线中流过的电流为个别设备电流i
i(t)
。对于它们,电流获取部21用电流传感器获取学习时的波形,分别作为i
w(0)
、i
ci(0)
、i
i(0)
存储在基准波形存储部11中。
[0190]
在运行时,电流获取部21首先获取总电流i
w(t)
,用下式(12)所示的式子进行多元回归分析,计算各控制电路板电流变化率α
ci
。
[0191]
[数12]
[0192]iw(t)
=α
c1
×ic1(0)
+α
c2
×ic2(0)
+α
c3
×ic3(0)
……
式(12)
[0193]
接着,使用α
c1
×ic1(0)
的值,推断第一控制电路板411附带的个别设备的电流波形。推断中使用将总电流i
w(t)
置换为α
c1
×ic1(0)
的下式(13)。
[0194]
[数13]
[0195]
α
c1
×ic1(0)
=α1×i1(0)
+α2×i2(0)
+α3×i3(0)
……
式(13)
[0196]
因为根据上式(13)能够计算台x轴431、台y轴432、工具z轴433的电流波形的变化率α1~α3,所以能够计算第一控制电路板411附带的个别设备的异常度。
[0197]
这样,根据第六实施例的数值控制金属加工机400,具有如下所述的效果:即使是多层分支的电源系统电路的装置,只要能够获取作为对象的线的基准波形,就能够在实现运行中的传感器成本减小的同时实施异常判断。
[0198]
另外,本发明不限定于上述实施例,包括各种变形例。例如,数值控制金属加工机400也可以是其他多轴控制的工作机械(机床)。另外,上述第六实施例中以存在一层控制电路板的嵌套结构为例,但不限于此,也可以是存在多层控制电路板的嵌套结构。
[0199]
另外,作为多变量分析的例子进行了多元回归分析,但不限于此,也可以进行主成分分析等其他分析方法。
[0200]
另外,能够将某实施例的结构的一部分置换为其他实施例的结构,也能够在某实施例的结构上增加其他实施例的结构。
[0201]
另外,对于实施例的结构的一部分,能够增加、删除、置换其他结构。
[0202]
另外,上述的异常设备判断装置1的各结构、功能、处理部、处理单元等,例如可以
通过用集成电路进行设计等而用硬件实现一部分或全部。另外,上述各结构、功能等,也可以通过处理器解释、执行实现各功能的程序而用软件实现。实现各功能的程序、表、文件等信息,能够保存在存储器、硬盘、ssd等记录装置、或者ic卡、sd卡、dvd等记录介质中。
[0203]
另外,控制线、信息线示出了认为说明上必要的,并不一定示出了产品上全部的控制线、信息线。实际上也可以认为几乎全部结构都通过通信网络、总线等相互连接。
[0204]
本发明的技术不限于异常设备判断装置,也能够以异常设备判断系统、服务器装置、计算机可读取的程序、异常设备判断服务(方法)等各种方式提供。
[0205]
附图标记的说明
[0206]1……
异常设备判断装置,10
……
存储部,11
……
基准波形存储部,20
……
处理部,21
……
电流获取部,22
……
异常判断部,23
……
判断结果显示部,100
……
配电柜,200
……
控制盒,300
……
机器人部,301
……
第一工作轴,302
……
第二工作轴,303
……
第三工作轴,304
……
第四工作轴,305
……
第五工作轴,306
……
第六工作轴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1