一种面向龙门机器人的数字孪生系统
1.本发明涉及数字孪生技术领域,尤其是一种面向龙门机器人的数字孪生系 统。
背景技术:
2.数字孪生技术将助力包括5g基建、特高压、城际高速铁路和城市轨道交 通、大数据中心、新能源汽车充电桩、人工智能、工业互联网等各大领域实现 颠覆式转变的引擎之一。
3.针对机器人的数字孪生系统,中国发明专利号cn202110055322.6,公开一 种基于数字孪生技术采用历史数据据驱动虚拟模型仿真的方法,该方法包括数 据存储和数据调用,采用时序性数据库存储生产线采集的历史数据,但没有完 成对孪生系统实时数据的处理。
4.又例如,中国发明专利号cn202010517266.9,公开了一种面向涂装线的数 字孪生喷涂仿真系统及方法,涉及喷涂仿真领域。根据模拟涂装线的数据表现 结果,可以真是映射真正涂装线操作结果,从而帮助对可能出现的问题做出预 测性的推断以及对整个生产线进行设计优化,使用的方法实现了虚拟对物理的 同步对应,没有实现虚拟和实际的双向控制。
5.论文中李新等人开发了基于ue4的井下变电所巡检机器人数字孪生系统, 可以完成巡检环境漫游以及中央控制功能,通过系统接口完成了数据库的管理。 李福等人建设了复杂环境下智能机器人高危作业虚拟仿真实验教学平台,借助 虚拟仿真技术把高危复杂场景和机器人高端装备搬进虚拟实验室,完成了教学 和实验要求。汪浩等人基于数字孪生技术,对自动上下料系统进行机电一体化 设计,缩短了新产品开发周期,降低了开发成本。由于机器人的种类繁多,数 字孪生技术慢慢走向具体化,定制化的道路,国内外对数字孪生技术的研究和 应用呈现井喷式发展,同时涌现了很多新的研究成果。但是数字孪生技术在自 动化生产线的设计研发和具体应用还在探索阶段,研究成果较少且缺乏系统性 且鲜有对于数字孪生在龙门机器人系统上的研究。目前大多数的数字孪生系统 现有技术仅实现了虚拟场景远程实时监控功能,却无法对机器人进行控制并利 用数字孪生系统分析问题。
6.面向复杂结构的机器人,数字孪生系统融合机器人研究的科学性和实践性 可以综合考虑机器人自身结构需求完成调度规划的研究,构建机器人智能操作 平台。龙门机器人作为一种成本低廉、系统结构简单的自动化机器人系统解决 方案,可代替人工,提高生产效率,稳定产品质量等方面都具备显著的应用价 值。近年来数字孪生技术广泛应用于智能工厂、智能车间之中。大跨距龙门机 器人是智能工厂中必不可少的一部分,可以服务多台机器,完成点胶、滴塑、 喷涂、码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配、印刷等常 见的工业生产领域。构建龙门机器人的数字孪生系统可以实现远程操控功能, 同时可以规避风险,及时进行安全监控及预警,避免发生危险。
技术实现要素:
7.针对现有技术不足,本发明提供一种面向龙门机器人的数字孪生系统,构 建龙门机器人的数字孪生系统可以实现远程操控功能,同时规避风险,及时进 行安全监控及预警,避免发生危险。
8.为解决上述技术问题,本发明所采用的技术方法是:
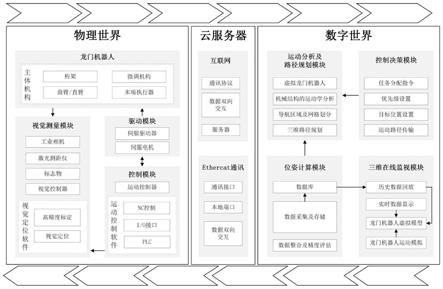
9.一种面向龙门机器人的数字孪生系统,该系统包括物理世界的真实龙门机 器人、数字世界的虚拟龙门机器人和互联两者的云服务器;
10.物理世界的真实龙门机器人由龙门机器人主体机构、驱动模块、视觉测量 模块和控制模块分别交互组成;
11.数字世界的虚拟龙门机器人由三维在线监视模块、控制决策模块、运动分 析及路径规划模块和位姿计算模块交互组成;
12.云服务器分别通过ethercat通讯模块和互联网模块,互联实现物理世界和 数字世界;
13.龙门机器人主体机构包括桁架、曲臂或直臂、微调机构和末端执行器组成;
14.驱动模块包括伺服驱动器和伺服电机组成;
15.视觉测量模块包括视觉控制器、工业相机、激光测距仪、标志物和视觉定 位软件组成,其中视觉定位软件由高精度标定和视觉定位组成;
16.控制模块包括运动控制器和运动控制软件组成,运动控制软件包含nc控 制、i/o接口和plc;
17.三维在线监视模块包括龙门机器人虚拟模型、龙门机器人运动模拟、历史 数据回放和实时数据显示组成;
18.控制决策模块包括任务分配指令、优先级设置、目标位置设置和运动路径 传输组成;
19.运动分析及路径规划模块包括虚拟龙门机器人、机械结构的运动学分析、 导航区域及网格划分和三维路径规划组成组成;
20.位姿计算模块包括数据库、数据采集及存储和数据整合及精度评估组成;
21.互联网模块包括通信协议、数据双向交互、服务器组成;
22.ethercat通讯模块包括通信接口、本地端口、数据双向交互组成。
23.本发明技术方法的进一步改进在于:数字世界的虚拟龙门机器人是基于物 理世界的真实龙门机器人按照1:1的比例构建,二者的坐标原点、物理尺寸, 以及内部设备的三维空间布局具有一致性,其一致性对应关系是通过离线的视 觉标定实现,包括如下步骤:
24.s11、真实龙门机器人一角,以及每个内部设备的工作台边缘安装用于视 觉定位的标定板,并确保标定板在相机成像范围内可获得清晰成像,记录此时 的标定板图像为i0;
25.s12、定义真实龙门机器人z方向运动到最下端,xy方向运动到龙门机器 人一角时,所对应的标定板中心在相机坐标系下的成像位于图像中心时的位置 为龙门机器人零点,所对应的xyz方向交点为世界坐标系原点o;
26.s13、以原点o为起点驱动龙门机器人沿xyz轴运动到第j个内部设备工 作台的视觉标定板处,并保证标定板在相机中的成像ij与i0相同。此时,记设 备j在世界坐标系下的
坐标为(xj,yj,zj);其中,xj=x方向行程
×
x方向丝杆量 程;yj=y方向行程
×
y方向丝杆量程;zj=-z方向行程
×
z方向丝杆量程。
27.本发明技术方法的进一步改进在于,三维在线监视模块中监视过程的步骤 如下:
28.s21、用户通过控制决策模块的操作按钮,加载虚拟龙门机器人三维模型、 虚拟相机和虚拟实验场景,启动在线监视任务;
29.s22、实际龙门机器人的运动数据通过网络实时传送给虚拟龙门机器人, 虚拟龙门机器人通过运动分析和运动仿真驱动虚拟龙门机器人三维模型实现和 真实龙门机器人一致的运动,进而达到远程在线监控的目的。
30.s23、实际龙门机器人运动的数据存储在数据库中,可供用户根据时间进 行历史数据的查看和回放;
31.s24、虚拟龙门机器人可以根据用户指令,通过运动分析和运动仿真进行 工艺流程预演,以便确定现有工艺流程是否合理。
32.本发明技术方法的进一步改进在于,数字世界的虚拟龙门机器人控制物理 世界龙门机器人运动,操作步骤如下:
33.s31、用户通过控制决策模块的操作按钮,指定具体的操作任务、流程和 目标;
34.s32、虚拟龙门机器人通过龙门机器人运动学分析、导航区域网格划分和 三维路径规划为真实龙门机器人规划出合理的运行路径,并实时向真实龙门机 器人的控制模块发送路径关键点数据,物理世界的真实龙门机器人通过实时跟 踪数字世界龙门机器人的运行轨迹实现对虚拟路径的跟随,通过设计输入整形 器,对物理世界龙门机器人所接收的位置信息进行整形,以此来减小悬臂梁末 端的振动,使其更加准确的跟踪数字世界龙门机器人的实时位置;
35.s33、当物理世界龙门机器人的末端执行器运动到目标位置附近,视觉测 量模块开始工作,视觉测量的方法是利用激光测距仪获得z方向的偏差,采用 数字相机2d视觉测量方法获得xy方向的偏差,实时捕获标志物的数据和视觉 测量模块计算当前位置距离目标位置的偏差,将偏差值送入物理世界龙门机器 人的运动控制器和位姿处理模块进行定位精度评估,通过运动控制偏差补偿算 法实现位置的精准调控。
36.本发明技术方法的进一步改进在于,物理世界的真实龙门机器人实时跟踪 数字世界龙门机器人的运行轨迹,对虚拟路径跟随包括如下步骤:
37.s321、通过对云服务器的部署,使其作为数字世界与物理世界数据交换的 桥梁;
38.s322、获取数字世界龙门机器人实时位置,通过在虚拟仿真平台设置好服 务器的ip与端口号,然后实时发送路径位置信息至服务器;
39.s323、物理世界龙门机器人同样通过twincat软件设置好服务器的ip与 端口号,然后实时接收服务器所接收的数字世界的位置信息,或者通过 ethercat总线,虚拟仿真平台实时发送路径位置信息至物理世界龙门机器人控 制器,通过外部位置给定的方法,实现物理世界龙门机器人实时跟踪数字世界 龙门机器人运行轨迹;
40.s324、通过设计输入整形器,对物理世界龙门机器人所接收的位置信息进 行整形,以此来减小悬臂梁末端的振动,使其更加准确的跟踪数字世界龙门机 器人的实时位置。
41.本发明技术方法的进一步改进在于,视觉测量模块计算当前位置距离目标 位置
的偏差,包括如下步骤:
42.s331、通过高精度的相机标定算法,自适应的调整相机的曝光度和模糊度, 获取最佳的标定图像,实现高精度的相机标定,得到精度较高的相机内参;
43.s332、通过二维视觉测量技术获得xy方向的偏差,然后通过激光测距仪 获得z方向的偏差,龙门机器人多次重复到达初始位置,计算到达时刻相机与 标志物的旋转平移矩阵与初始位置时刻的旋转平移矩阵,得到当前的位置偏差, 将位置偏差界面显示并发送至微调机构补偿偏差,实现高精度的定位。
44.本发明技术方法的进一步改进在于,运动分析及路径规划模块的算法,包 括如下步骤:
45.s41、对虚拟模型的末端执行器、桁架、曲臂和微调机构进行运动学分析, 对机器人进行正向和逆向运动学计算,以便对机器人进行运动控制,完成平移 和旋转轨迹模拟;
46.s42、在unity3d搭建的虚拟仿真平台中,读取虚拟环境中每个工作台的 边界点作为集合,通过区域避障分析构造新的点集,合并各工作台的点集,完 成三维导航网格的节点构建;
47.s43、结合navmesh搜索策略在三维导航网格上完成单目标三维路径规划, 给机器人提供导航路径,然后结合流水线调度完成工业流程下的多目标路径规 划,为数字孪生系统提供位置数据。
48.本发明技术方法的进一步改进在于,运动学分析包括对曲臂、微调机构和 行走机构在笛卡尔空间下的运动学方程构造,包括步骤如下:
49.s411、末端执行器和桁架的末端执行器在笛卡尔空间中的运动可分解为: 沿某条直线的平移运动和绕固定轴的旋转运动,末端执行器和桁架可采用直线 轨迹模拟,可分为平移轨迹模拟和旋转轨迹模拟;
50.假设轨迹起点的坐标为p
es
(x
e(0)
,y
e(0)
,z
e(0)
),终点位置的坐标为 p
ee
(x
e(1)
,y
e(1)
,z
e(1)
),从终点p
ee
到起点p
es
的轨迹长度为le:
51.le=|p
ee
(x
e(1)
,y
e(1)
,z
e(1)
)-p
es
(x
e(0)
,y
e(0)
,z
e(0)
)| (1)
52.其中,下标e为末端执行器,假设在当前状态下点p
e(i)
(x
e(i)
,y
e(i)
,z
e(i)
)到起 点p
es
的轨迹长度为s
e(i)
,s
e(i+1)
为在时间间隔为δt的下一个状态的轨迹长度, 假设s
e(i)
对应的线速度为v
e(i)
,加速度为ae,并假设s
e(i+1)
处线速度为v
e(i+1)
:
53.s
e(i+1)
=s
e(i)
+v
e(i+1)
·
δt (2)
54.直线运动轨迹方程为:
[0055][0056]
如果v
e(i)2
/2ae≤l
e-s
e(i)
,插值点处于加速匀速段,插值方程为:
[0057][0058]
如果v
e(i)2
/2ae>l
e-s
e(i)
,插值点处于减速段,末端执行器以αe的加速度减 速直到完成本段插补:
[0059]ve(i+1)
=v
e(i)-aeδt (5)
[0060]
假设某时刻下末端操作器的角度为θ
e(i)
,θ
e(i+1)
为在时间间隔为δt的下一个 时刻的角度,假设θ
e(i)
对应的线速度为ω
e(i)
,角加速度为αe,并设下一插值点 θ
e(i+1)
处速度为ω
e(i+1)
:
[0061]
θ
e(i+1)
=θ
e(i)
+ω
e(i+1)
·
δt (6)
[0062]
当ω
e(i)2
/2αe≤θ
e-θ
e(i)
时,插值点处于加速匀速段:
[0063][0064]
当ω
e(i)2
/2αe>θ
e-θ
e(i)
时,插值点处于减速段:
[0065]
ω
e(i+1)
=ω
e(i)-αeδt (8)
[0066]
桁架在笛卡尔空间中的运动只包括沿某条直线的平移运动;类似地,假设 桁架从终点p
te
(x
t(1)
,y
t(1)
,z
t(1)
)到起点p
ts
(x
t(0)
,y
t(0)
,z
t(0)
)的轨迹长度l
t
为:
[0067]
l
t
=|p
te
(x
t(1)
,y
t(1)
,z
t(1)
)-p
ts
(x
t(0)
,y
t(0)
,z
t(0)
)| (9)
[0068]
下标t为桁架;桁架的直线运动轨迹方程
[0069][0070]
如果v
t(i)2
/2a
t
≤l
t-s
t(i)
,则桁架的插值点在加速匀速段;插值方程为:
[0071][0072]
如果v
t(i)2
/2a
t
>l
t-s
t(i)
,桁架的插值点在减速段:
[0073]vt(i+1)
=v
t(i)-a
t
δt (12)
[0074]
s412、龙门机器人机械曲臂的伸缩结构可简化为菱形,其边长为la,垂直 对角线设为ha,la和ha所成角度为θa,当机械曲臂向上伸缩某一位置时,垂直 对角线设为h
a(i+1)
,二者相差高度设为δha,机械臂上缩后的角度变为θ
a(i+1)
,二 者相差角度设为δθa,关系如下所示:
[0075][0076]
通过几何关系可知,垂直对角线和边长关系如下:
[0077][0078]
通过计算关系可知δθa和δha的关系如下:
[0079][0080]
可得曲臂的运动学关系式如下:
[0081][0082]
如上面的末端执行器平动轨迹模拟原理一致,对曲臂关节的高度参数进行 插值:
[0083]ha(i+1)
=h
a(i)
+v
a(i+1)
·
δt (17)
[0084]
假设终点p
je
(x
j(1)
,y
j(0)
,z
j(1)
)到起点p
js
(x
j(0)
,y
j(0)
,z
j(0)
)的轨迹高度为h:
[0085]
h=|p
je
(x
j(1)
,y
j(0)
,z
j(1)
)-p
js
(x
j(0)
,y
j(0)
,z
j(0)
)| (18)
[0086]
其中,下标j为曲臂关节,中间点p
j(i)
(x
j(i)
,y
j(0)
,z
j(i)
)到起点p
js
的轨迹长度 为h
j(i)
,则直线运动轨迹方程为:
[0087][0088]
s413、龙门机器人微调机构属于并联机构结构,假设机构曲臂连杆边长为lf, 定平台水平连杆相对于动平台水平连杆高度设为h
f(i)
,lf和h
f(i)
所成角度为θ
f(i)
, 动平台固定装置在自身坐标系下沿水平连杆方向的位置距离连杆前端的长度设 为m
f(i)
,当微调机构向z轴方向伸缩某一位置时,长度设为m
fz(i+1)
,二者相差长 度设为δm
fz
,此时高度设为h
fz(i+1)
,二者相差高度设为δh
fz
,此时角度设为θ
fz(i+1)
, 二者相差角度为δθ
fz
,关系如下所示:
[0089][0090]
其中,下角标f表示微调机构,通过计算关系可知δθ
fz
和δm
fz
的关系如下:
[0091][0092]
通过计算关系可知δθ
fz
和δh
fz
的关系如下:
[0093][0094]
微调机构的运动学关系式如下:
[0095]
[0096]
其中,i∈{1,2,3
…
},θ
fz(i)
为微调机构连杆关节的轴旋转角度,κ
fz
、为δθ
fz
和δm
fz
所对应各关节的关系系数,κ
fz
′
、为δθ
fz
和δh
fz
所对应各关节的关系 系数。
[0097]
本发明技术方法的进一步改进在于,步骤s42中的三维导航网格的节点构 建,包括如下步骤:
[0098]
s421、面向工作场景为门板加工的要求,龙门机器人需要抓取门板并将其 放置在指定位置,工作台需要完成门板的切割、冲孔、组装等操作;读取虚拟 环境中每个工作台的边界点作为集合vw,通过区域避障分析构造新的点集ve, 合并各工作台的点集,完成三维导航网格的节点构建;
[0099]
s422、对龙门机器人末端执行器的运动区域空间进行划分,机械曲臂伸缩 的上下限规定了末端执行器的最大、最小高度h
e(max)
和h
e(min)
,末端执行器的高 度范围h
e(i)
可设为:
[0100]he(min)
≤h
e(i)
≤h
e(max) (24)
[0101]
通过末端执行器的上下限高度可将大跨距龙门机器人内部空间ω分为两部 分:
[0102][0103]
其中,ω1为末端执行器可飞跃移动的区域,ω2为不可进行飞跃移动的区域;
[0104]
s423、为了确保末端执行器在移动和旋转期间不与障碍物发生碰撞,需要 对模型进行简化,为了避免碰撞,为ω1区域不同高度的平面添加用于构建网格 的关键点集;
[0105]
s424、假设同一平面上的所有点构成一个集合;
[0106]
v={vw,ve}={v1,v2,...vn},{v1,...vi}∈vw,{v
i+1
,...vn}∈ve (26)
[0107]
空间中不共线的三个点vi(xi,yi,zi),vj(xj,yj,zj),vk(xk,yk,zk)构成的平面 方程为:
[0108][0109]
通过上述分析,将采集后的点集和为了避免碰撞在数学分析下增加的点集 汇总,联立平面方程组,形成空间中的多平面集,三个不共线的点构成一个平 面三角形凸包,每个凸包平面组成的空间多边形集合构成了凸多边形导航网格。
[0110]
本发明技术方法的进一步改进在于,步骤s43中,三维导航网格上完成单 目标三维路径规划过程,包括如下步骤:
[0111]
s431、构造网格后,navmesh寻路算法通过计算最小路径代价驱动虚拟模 型移动,在三维虚拟环境中,凸多边形集合将场景表示为一个类似图形的结构, 凸多边形之间可以形成若干个节点;
[0112]
s432、图的节点之间可以形成一个开放区域,区域内的任何一点都可以通 过直线到达并相互连接,节点的边缘表示可以直接到达两个多边形连接的区域, 区域是双向连接
的,在图结构的基础上,可使用各种图搜索算法来寻找连通路 径;
[0113]
s433、在工业生产线上,采用流水线调度解决各类物料搬运任务,结合 navmesh寻路算法和三维网格完成实际的工厂生产线任务。
[0114]
与现有技术相比,本发明提供一种面向龙门机器人的数字孪生系统有益效 果如下:
[0115]
1、一种面向龙门机器人的数字孪生系统,通过该系统直接进行目标位置设 定,真实机器人会根据路径规划算法直接运行到指定位置,无需人为干预。
[0116]
2、一种面向龙门机器人的数字孪生系统,可远程实时监控真实龙门机器人 运行状态,并实现闭环的高精度定位控制,场景更加逼真,用户更有沉浸感。
附图说明
[0117]
为了更清楚地说明本发明实施例或现有技术中的技术方法,下面将对实施 例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述 中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付 出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0118]
图1是本发明一种面向龙门机器人的数字孪生系统的框架示意图;
[0119]
图2是本发明数字孪生数据传输流程图;
[0120]
图3是本发明龙门机器人整体模型示意图;
[0121]
图4是本发明龙门机器人机械曲臂模型示意图;
[0122]
图5是本发明龙门机器人微调机构模型示意图;
[0123]
图6是本发明微调机构水平面运动学位置关系几何结构简图;
[0124]
图7是本发明微调机构水平面运动学位置随x方向移动关系几何结构简图;
[0125]
图8是本发明微调机构水平面运动学位置随y方向移动关系几何结构简图;
[0126]
图9是本发明微调机构水平面运动学旋转关系几何结构简图;
[0127]
图10是本发明微调机构水平面运动学分支结构旋转关系几何结构简图;
[0128]
图11是本发明三维网格构建绕行避障分析示意图;
[0129]
图12是本发明三维网格构建飞跃避障分析示意图;
[0130]
图13是本发明三维网格关键点集构造示意图阶段一;
[0131]
图14是本发明三维网格关键点集构造示意图阶段二;
[0132]
图15是本发明三维网格关键点集构造示意图阶段三;
[0133]
图16是本发明navmesh算法搜索策略原理示意图步骤一;
[0134]
图17是本发明navmesh算法搜索策略原理示意图步骤二;
[0135]
图18是本发明navmesh算法搜索策略原理示意图步骤三;
[0136]
图19是本发明navmesh算法搜索策略原理示意图步骤四;
[0137]
图20是本发明多工位路径规划流水线处理序列的有向图;
[0138]
图21是本发明结合流水线调度的多工位加工生产排序甘特图;
[0139]
图22是本发明面向用户的交互界面示意图。
具体实施方式
[0140]
下面结合实施例对本发明做进一步详细说明:
[0141]
龙门机器人的数字孪生系统主要包括场景重建,算法仿真,数据读写与交 互三个部分。
[0142]
如图1所示,为龙门机器人数字孪生系统,包括如下步骤:
[0143]
s01、控制决策、运动分析及路径规划模块:对等比例虚拟龙门机器人模 型的机械结构进行运动学分析,对微调机构和曲臂结构进行机器人的逆运动学 计算,以便对机器人进行运动控制。对三维凸多边形进行网格构造后,针对龙 门机器人加工需求,完成基于不同任务的三维路径规划算法设计。手动设置龙 门机器人目标位置,通过路径规划算法计算龙门机器人从起始位置运行到目标 位置的合理的路径,如果需要到达多个目标位置,则对多个目标进行优先级设 置,根据任务分配指令生成一条合理化路径。然后根据生成的路径,物理世界 的龙门机器人通过跟随控制算法实现对虚拟路径的跟随,并运行到指定的目标 位置。
[0144]
s02、控制模块和驱动模块:虚拟仿真平台实时发送路径位置信息至运动 控制软件,通过ads通信,通过外部位置给定的方法,使伺服电机和伺服驱动 器实现物理世界龙门机器人实时跟踪数字世界龙门机器人运行轨迹;通过高精 度的相机标定算法,自适应的调整相机的曝光度和模糊度,获取最佳的标定图 像,实现高精度的相机标定,得到精度较高的相机内参;通过手动设置龙门机 器人初始位置,计算初始位置中相机与标志物的旋转平移矩阵,并将计算值记 录在数据库中,在人机交互界面也可以实现数据的界面显示;龙门机器人多次 重复到达初始位置,计算到达时刻相机与标志物的旋转平移矩阵与初始位置时 刻的旋转平移矩阵作,得到当前的位置偏差,将位置偏差界面显示并发送至微 调机构补偿偏差,实现高精度的定位。
[0145]
s03、龙门机器人和视觉测量模块:大跨距曲臂龙门机器人主体机构分为 桁架、曲臂、横梁、末端执行器,当物理世界龙门机器人的末端执行器运动到 目标位置附近,视觉测量模块开始工作,末端执行器上方的工业相机和激光测 距仪实时捕获标志物的数据,通过视觉定位软件计算当前位置距离目标位置的 偏差,该偏差值送入物理世界龙门机器人的运动控制器,通过运动控制偏差补 偿算法实现位置的精准调控。
[0146]
s04、位姿计算及三维在线监视模块:将偏差补偿后得到的位姿数据采集 并存储,并对数据进行数据整合及精度评估,并将数据传输到数据库。数据库 中形成的历史数据可驱动龙门机器人模型进行同步运动模拟,
[0147]
在仿真界面显示实时数据,实现远程监控。
[0148]
s05、云服务器:通过ethercat通讯和互联网实现物理世界和数字世界的互 联。
[0149]
如图2所示,本发明实施方式提出了不需要经过数据传输系统,直接将仿 真平台和倍福控制系统进行数据读取和写入的交互方法,包括以下步骤:
[0150]
s21、龙门机器人控制器添加路由,并向其控制器下载程序后运行控制器;
[0151]
s22、虚拟仿真平台选择.netframeworkv4.0.30319版本,添加ads库文 件,路径为c:\twincat\adsapi\.net;
[0152]
s23、在unity3d仿真平台编写c#程序,实现数据的读取与写入,主要使 用readany与writeany两个函数进行读写。
[0153]
如图3所示,大跨距曲臂龙门机器人主要结构包括行走横梁1,横梁下面 衔接u型曲臂机构2,微调机构3在u型曲臂机构2和末端执行器4中间,末 端操作器4负责门板抓取和上下料等任务。横梁5和支撑柱6作为大跨距龙门 机器人的支撑机构,连接梁7衔接在横梁5的首尾之间,有固定、支撑机器的 作用。
[0154]
如图4所示,u型曲臂机构2由侧盖8负责衔接曲臂的结构,带动曲臂上 臂9的旋转,伺服电机10放在曲臂上臂9和曲臂下臂11中间关节处,左右两 端各一个。轴承12负责固定曲臂下臂11的末端,最下端衔接下支架13,负责 固定吸盘。
[0155]
如图5所示,微调机构3上方置三个sgm7a电机14,分别负责带动微调 机构的三个轴承丝杠座15移动、每个轴承丝杠座下固定一个上轴承支撑板16, 连接连杆17-18,连杆由下方下轴承支撑板19固定,动平台连接件20衔接三 个下轴承支撑板和端拾器连接座21等结构。
[0156]
如图6所示,当微调机构沿水平面移动时,各关节位置关系的自身坐标系 与空间坐标系需要完成坐标转换。
[0157]
如图7、8所示,当末端执行器向世界坐标系x轴和y轴方向移动时,点 p
fa
(x
fa
,y
fa
,z
fa
)、p
fb
(x
fb
,y
fb
,z
fb
)和p
fc
(x
fc
,y
fc
,z
fc
)对应的动平台连接件自身坐 标系矢量映射关系矩阵如下:
[0158][0159]
其中,k1和k2为水平面位置转换关系系数,由几何关系可知:k1=-1/2, 同样地,由公式(23)可知点r
fa
(x
′
fa
,y
′
fa
,z
′
fa
)、r
fb
(x
′
fb
,y
′
fb
,z
′
fb
)和 r
fc
(x
′
fc
,y
′
fc
,z
′
fc
)对应的连杆自身坐标系适量映射关系矩阵如下:
[0160][0161]
其中k3=κ
fz
=-0.6,为z轴位置转换关系系数。同样地,点q
fa
(x
″
fa
,y
″
fa
,z
″
fa
)、 q
fb
(x
″
fb
,y
″
fb
,z
″
fb
)和q
fc
(x
″
fc
,y
″
fc
,z
″
fc
)对应的连杆自身坐标系适量映射关系矩阵如 下:
[0162][0163]
如图9所示,当微调机构沿水平面移动时,各连杆及连杆组旋转关系的自身 坐标系与空间坐标系需要完成坐标转换。
[0164]
如图10所示,当末端执行器o
′
(xo′
,yo′
,zo′
)向世界坐标系x轴和y轴方向移动 时,点r
fa
、r
fb
和r
fc
对应的连杆自身坐标系旋转矢量和映射关系 矩阵如下:
[0165][0166]
其中k为水平面旋转转换关系放大系数,由微调机构尺寸大小决定。同样地, 点s
fa
、s
fb
和s
fc
对应内连杆组旋转矢量和映射关系矩阵如下:
[0167][0168]
同样地,点s
ta
、s
tb
和s
tc
对应的四连杆组自身坐标系旋转矢量和映射关系矩阵如下:
[0169][0170]
如图11所示,假设起点s和终点g之间存在障碍物。静态矩形障碍物从 不同视图进行了描述。如果障碍物的高度高于末端执行器的上限,则标记障碍 物以禁止机器人在路径规划中搜索包含障碍物的网格。绕道时采用的避障策略 适用于不可进行飞跃移动区域的障碍物。
[0171]
如图12所示,如果障碍物高度低于末端执行器的上限。在障碍物周围构造 一组新的平面点,机器人在重建的网格上进行路径搜索。避障策略是跨越障碍 物。它可以有效地降低路径成本,提高路径搜索和移动效率。
[0172]
如图13、14、15所示,为末端执行器从平面α移动到平面β的过程。为了避 免碰撞,为ω1区域不同高度的平面添加了用于构建网格的关键点集。对于不同 高度的地形,末端操作器移动时需要考虑到自身结构。空心圆柱o的内圆柱直 径作为末端执行器的对角线长度。为了避免碰撞,内外圆柱的半径差为拓展的 安全距离。假设外圆柱的半径为rc′
,内圆柱的半径为rc,两者的关系可以初步 设定为:
[0173]
rc′
=μ
·
rc,μ∈(1.2~1.3) (34)
[0174]
其中μ是关系系数。假设末端执行器的简化模型o需要从平面α移动到平面 β上的点h。当平面α中的直线l1与圆柱体的外半径圆相切时,末端执行器可以 在z轴上移动。从平面上的点a、b、c开始,(vw={a,b,c})导航代理圆柱体 o的中心、平面上的目标点h以及通过点h的任何直线上的扩展点d、e、f、 点g形成节点集(ve={d,e,f,g,h})。然后形成凸多边形导航网格。末端执行 器可以使用navmesh算法计算到平面的最短路径。
[0175]
如图16、17、18、19所示,是在三维网格的基础上,选择navmesh算法作 为导航搜索策略的四个步骤。navmesh算法是基于a*算法的原理。根据构建的 平面集邻接信息,从起点到终点经过的多边形集被搜索。其中s为起点,g为 终点,其余为中间节点。该集合由v表示。
[0176]
v={v1,v2,v3,
…
} (35)
[0177]
第一步,在初始三角形sv
1v2
列表中找到相邻边sv1和sv2;
[0178]
第二步,v3在漏斗里边,则更新漏斗边sv3,漏斗将变得更窄;v4在漏斗外 边,则无需更新漏斗;
[0179]
第三步,v5在漏斗里边,则更新漏斗边sv5;v6在漏斗外边,无需更新漏斗;
[0180]
第四步,重复以上步骤,构造出最短路径。
[0181]
如图20所示,门需要按照图中箭头顺序加工。工作台1的功能与工作台2 相同。当1号工作台处于非空闲状态时,2号工作台用作目标位置。如果两个工 作台都在工作,则机器人需要等待其加工完毕。同样,3号和4号是一组,5号 和6号是另一组。
[0182]
如图21所示,利用生产排序甘特图完成工业流程下的多工位路径规划调度。
[0183]
在工业生产线上,利用流水线调度解决各类物料搬运任务,为此作如下假 设:
[0184]
a.假设在一条流水线上有n个作业,每个作业要求执行m个任务,分别为
[0185]
t
1i
,t
2i
,
…
,t
mi
,1≤i≤n。并且这个任务t
ji
只能在设备pj上执行,1≤j≤m;
[0186]
b.对任一作业i,在任务t
ji
没完成前,t
(j-1)i
不能执行;
[0187]
c.每个工作台的作业时间都相同,为tw;
[0188]
d.同一台设备在任何时刻不能同时处理一个以上的任务;
[0189]
e.工件位置按照一定优先级排列;
[0190]
f.每台机器执行一项特定的工作,必须在产品移动到生产线的下一个位置 之前完成;
[0191]
在数字孪生平台上,工作台的位置可以直接读取。图9中列举了所有工作 台的位置基于甘特图的顺序。在甘特图的流水线内,规定一定的时间间隔,设 置机器人回到初始位置取门。否则,按照甘特图的顺序选择工作台位置为目标 点。生产分配需要三个阶段,阶段1为木门加工任务的初始状态,机器人大部 分时间处于空闲状态。阶段2为木门加工的中间阶段,可设置循环次数根据要 求。阶段3为结尾阶段,不再提供加工的门板。将流水线调度模型结合三维路 径规划方法,可解决龙门机器人的多目标路径规划问题。
[0192]
如图22所示,本发明实施方式构造了可交互、控制的数字孪生系统界面, 其包括功能选项区、龙门机器人整体仿真监控画面、曲臂及微调机构仿真监控 画面、状态监控及控制区。功能选项区用于用户登录,画面设置等功能设置; 龙门机器人整体运动情况状态及曲臂微调机构运动通过仿真监控画面呈现;状 态监控及控制区用以显示数据采集通道的连接状态,统一坐标系后笛卡尔空间 下虚拟和实际的运动坐标,末端操作器和微调机构的限位状态以及运行过程中 产生的调试信息。
[0193]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发 明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员 对本发明的技术方法做出的各种变形和改进,均应落入本发明装置权利要求书 确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1