大风浪海况下的船舶航行速度控制系统的控制方法
1.本发明属于船舶航行速度控制技术领域,尤其涉及一种大风浪海况下的船舶航行速度控制系统的控制方法。
背景技术:
2.随着世界贸易经济的不断发展,航运业变得越来越重要。船舶运输每天都在进行着,出于贸易竞争的需要,船舶的快速性和安全性也变得更加重要。而海上多变的环境,主要指海上的大风浪天气,也很大程度上影响着船舶的航行安全。
3.当船舶进入大风浪区域航行时,船舶将出现较剧烈的摇荡运动、降速、航向不稳定,以及由此引发的其他操纵方面的困难,甚至出现难以预料的危险。比如:大风浪会增加船舶的航行阻力,降低航速,使船舶产生剧烈摇摆。顶浪航行时,由于缩短了涌浪与船舶的撞击周期,使涌浪的碰撞次数增多,撞击程度加剧,增大了对船体的危害,剧烈的纵摇会使螺旋浆露出水面空转,使船舶尾部受到强烈震动,有时会造成浆叶脱落、尾轴断裂,甚至尾壳破裂进水;此外,船舶有可能同时受到一个或两个波峰的作用,发生中拱或中垂现象,使船体结构变形,受到严重损伤,甚至船体断裂。顺浪航行时,如果船速低于波速而船舶又位于波谷中,则涌浪会冲击、淹没船尾,螺旋桨和尾轴会受到损害;如果船速与波速相近而船舶又位于涌浪前部斜面或波谷中,船舶易发生偏转,使船体横对风浪,而造成船体倾斜,甲板大量上浪,对航行安全极为不利。此外,船舶处于风浪的上升阶段和下降阶段对船舶所造成的冲击是不同,从而导致船舶航行速度的变化也是不同的。
4.目前,现有船舶航行速度控制方法不能很好地解决上述问题,如cn111090911a所述的“一种船舶航速节能优化辅助方法”,虽然给出了根据航区风浪变化实时调整剩余航段的航速,但是其无法判断螺旋桨在海水内所处位置及船舶处于风浪的哪个阶段从而对船舶航行速度做出准确的调整。因此,在大风浪海况下,考虑如何对船舶航行速度进行控制,使其低速稳定运行,是目前船舶航行速度控制需要解决的问题。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种大风浪海况下的船舶航行速度控制系统的控制方法。
6.为解决上述技术问题,本发明所采用的技术方案为:一种大风浪海况下的船舶航行速度控制系统的控制方法,其中控制系统包括螺旋桨、螺旋桨安装主轴、薄片式压力传感器,压力传感器保护罩,控制系统,船舶主机组件,采集组件以及运算器;
7.螺旋桨安装于螺旋桨安装主轴上,薄片式压力传感器通过螺栓固连在螺旋桨安装主轴上;且在薄片式压力传感器的外侧设有压力传感器保护罩,压力传感器保护罩通过螺栓固连在螺旋桨安装主轴上;
8.采集组件采集螺旋桨、船舶主机组件以及船舶周围海域的数据,并发送至运算器处理,运算器把运算结果传输至控制系统,控制系统对船舶主机组件实施控制;
9.采集组件包括薄片式压力传感器、燃油压力传感器、柴油机气缸表、北斗卫星以及海洋浮标,薄片式压力传感器用于测量、螺旋桨安装主轴所处位置的压力,燃油压力传感器安装于喷油器喷嘴内,用于测量喷油器喷嘴的燃油压力,柴油机气缸表与柴油机气缸相连接,用于测量柴油机气缸压力;北斗卫星用于采集船舶的ais数据;
10.海洋浮标内设有海洋波谱仪、回声测深仪以及密度计,海洋波谱仪用于测量风浪的波高和波长,回声测深仪用于测量风浪的水深,密度计用于测量海水的密度;
11.控制方法具体过程如下:
12.步骤1:确定大风浪的描述方式
13.采用有限振幅斯托克斯波理论描述海洋中的大风浪,其方程如下:
[0014][0015]
式中:η表示波面,波面至静水面的垂直距离;
[0016]
h表示波高,波谷底至波峰顶的垂直距离,可由海洋波谱仪测量获得;
[0017]
l表示波长,两个相邻波峰顶之间的水平距离,可由海洋波谱仪测量获得;
[0018]
h表示水深,静水面至海底的垂直距离,可由回声测深仪测量获得;
[0019]
k表示波数,δ表示波陡,
[0020]
步骤2:确定螺旋桨状态与压力之间的关系
[0021]
2.1:通过公式(2)计算当螺旋桨与海平面相切位置时,安装于螺旋桨安装主轴上的薄片式压力传感器处的临界压力p
临
:p
临
=ρ*g*h1ꢀꢀꢀ
(2)
[0022]
式中:ρ为当前海域海水密度,通过该海域内海洋浮标内的密度计测量获得;g为重力加速度,为已知量;h1为安装薄片式压力传感器的螺旋桨主轴距海平面的深度,通过测量船舶的吃水量计算获得;
[0023]
2.2:通过对比薄片式压力传感器测量的压力值p
测
与临界压力p
临
的大小,获得当前螺旋桨状态:
[0024][0025]
步骤3:确定船舶航速与螺旋桨转速关系
[0026]
以装载有海流计的海洋浮标为坐标原点,以船舶航行方向为纵坐标,以垂直于船舶航行方向为横坐标建立相对坐标系;
[0027]
3.1:海流流向与船舶航行方向的夹角θ为:θ=θ
2-θ1,其中,θ2为海流流向与地理坐标系的正北向间夹角,θ1为船舶航行方向与地理坐标系的正北向间夹角;
[0028]
3.2:计算由螺旋桨带动船舶行驶的航速v
′
船
:
[0029][0030]
式中,v1=|v
水
cosθ|;
[0031]
3.3:根据公式计算螺旋桨转速nr
′
与船舶航速v
′
船
关系如下:
[0032][0033]
式中,p
螺
为螺旋桨螺距,当螺旋桨确定时,该值也随之确定;λ为滑失比,为常数;步骤4:确定喷油量与转速关系
[0034]
4.1:在进行求解螺旋桨处于半入水状态时喷油量和转速间关系前,先进行样本数据采集:在大风浪工况下,船舶在规定航线之间多次航行采集样本数据簇
‑‑
[0035]
g1j(p
xj前
,p
zj前
,p
j测
,ρj,hj,lj,hj,θ2,v
水
,θ1,v
船
)
[0036]
(j为数据采集时刻,且为正整数),其中,p
xj前
为喷油器喷嘴的燃油压力,通过燃油压力传感器测量获得;p
zj前
为柴油机气缸压力,通过柴油机气缸表测量获得;p
j测
为压力值,通过薄片式压力传感器测量获得;ρj为当前海域海水密度,hj当前海域为波高,lj当前海域为波长,hj当前海域为水深,θ2当前海域为海流流向,v
水
当前海域为海流流速,均通过各海域内海洋浮标测量获得;θ1当前船舶航向,v
船
当前船舶航速,均通过ais数据获得;
[0037]
4.2:总控系统根据公式(1)计算各海域波面高度ηj,根据公式(2)计算各海域内薄片式压力传感器处的临界压力p
j临
,根据公式(4)和公式(5)计算船舶主机当前实际转速nr
j前
;根据公式(6)计算主机的喷油量q
j前
;把数据簇g1j简化为数据簇 g2j(q
i前
,nr
j前
,p
j测
,p
j临
,ηj);
[0038][0039]
式中,ρ
x
为喷油器喷嘴的密度,为已知量;p
x
为喷油器喷嘴的燃油压力;pz为柴油机气缸压力;
[0040]ux
为喷嘴的流量系数,喷嘴型号确定时,该值随之确定;
[0041]ax
为喷嘴的截面积,喷嘴型号确定时,该值随之确定;
[0042]
4.3:总控系统遍历数据簇g2j,若p
j测
≥p
j临
,则保存该组数据,组成数据簇g3a;若p
j测
《p
j临
且(η
j-η
j-1
)》0,则保存该组数据,组成数据簇g4b;若p
j测
《p
j临
且 (η
j-η
j-1
)《0,则保存该组数据,组成数据簇g5c;其中,数据簇g3a为螺旋桨处于全入水状态时的数据,数据簇g4b为螺旋桨处于波浪上升阶段半入水状态时的数据,数据簇g5c为螺旋桨处于波浪下降阶段半入水状态时的数据;0≤a≤j,0≤b≤j,0≤c≤j,且 a+b+c=j;
[0043]
4.4:总控系统通过调用matlab软件分别对数据簇g3a、g4b、g5c进行分析计算,获得喷油量q随转速n的变化关系式(7);
[0044][0045]
步骤5:对船舶航行速度进行控制
[0046]
5.1:预设船舶航行速度为v
航
;
[0047]
5.2:总控系统通过行驶海域内的海洋浮标测量获得当前海域的波高hi,当前海域的波长li,当前海域的水深hi,并根据公式(1)计算行驶海域的波面方程ηi;
[0048]
5.3:总控系统通过行驶海域内的海洋浮标测量获得当前海域的海水密度ρi,并根据公式(2)计算行驶海域的临界压力p
i临
;
[0049]
5.4:薄片式压力传感器每隔时间t测量一次螺旋桨安装主轴上的压力p
i测
;
[0050]
5.5:总控系统进行判断:若p
i测
≥p
i临
,则螺旋桨处于全入水状态,总控系统改变船舶主机的喷油量q,并通过公式q=f1(n)计算船舶主机的转速nri;若p
i测
《p
i临
且 (η
t-η
t-1
)》0,则螺旋桨处于波浪上升阶段的半入水状态,总控系统改变船舶主机的喷油量q,并通过公式q=f2(n)计算船舶主机的转速nri;若p
i测
《p
i临
且(η
t-η
t-1
)《0,则螺旋桨处于波浪下降阶段的半入水状态,总控系统改变船舶主机的喷油量q,并通过公式 q=f3(n)计算船舶主机的转速nri;
[0051]
5.6:总控系统通过行驶海域内的海洋浮标测量该海流流向θ
i2
和海流流速v
i水
;通过北斗获取该船舶的ais数据,包括当前船舶航向θ
i1
和当前船舶航速v
i船
;
[0052]
5.7:总控系统已知船舶主机转速nri,根据公式(5)反向求出由螺旋桨带动船舶行驶的航速vi′
船
;
[0053]
5.8:总控系统计算海流流向与船舶航行方向的夹角θi为θi=θ
i2-θ
i1
,并根据公式(4) 反向求得船舶实际的航行速度v
i航
;
[0054]
5.9:总控系统进行判断:|v
i船-v
i航
|≤
△
v是否成立,若成立,维持船舶主机当前喷油量不变,并执行步骤5.10;若不成立,总控系统调整喷油量q,并根据公式(7)计算主机的转速nri,并转至步骤5.6;
[0055]
5.10:总控系统通过北斗获取船舶所处海域并判断船舶是否驶入新的海域,若驶入新的海域,转至步骤5.2;若船舶仍处于当前海域,则转至步骤5.4。
[0056]
作为一种优选的方案,在所述薄片式压力传感器的外侧设有压力传感器保护罩,压力传感器保护罩通过螺栓固连在所述螺旋桨安装主轴上。
[0057]
本发明的有益效果是:
[0058]
本发明通过压力传感器获取螺旋桨安装主轴的压力,来判断螺旋桨在海水内所处的状态,测量、判断过程简单有效;通过不同时刻波面的高度变化,判断船舶处于风浪的上升阶段或者下降阶段,并针对不同船舶所处风浪阶段的不同,采用不同的控制策略,提高船舶航行速度控制的精确性;同时,通过测量不同航行海域的海水密度,确定螺旋桨与海平面相切时的临界压力,同时把海流的实时流速、实时流向考虑在内,增加了船舶航行速度控制方法的实时性与适用性。此外,在压力传感器上安装有保护罩,消除了风浪拍打在传感器上造成测量不准确的情况。
附图说明
[0059]
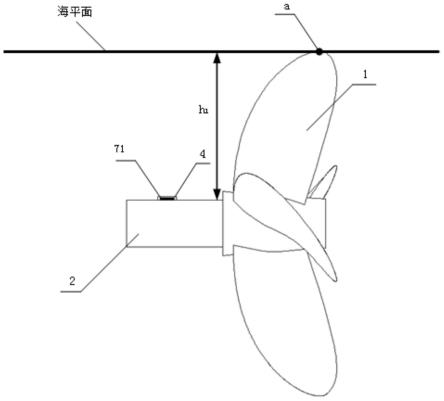
图1为本发明的螺旋桨主轴距离海平面深度示意图
[0060]
图2为本发明的船舶航行速度控制系统示意图
[0061]
图3为本发明的船舶航行速度控制方法
[0062]
图4为本发明的船舶航向与海流流向示意图
[0063]
图5为本发明的海流流速分解示意图
[0064]
图中,1-螺旋桨,2-螺旋桨安装主轴,3-运算器,4-压力传感器保护罩,5-控制系统, 6-船舶主机组件,7-采集组件;71-薄片式压力传感器,72-燃油压力传感器,73-柴油机气缸表,74-北斗卫星,75-海洋浮标,76-海洋波谱仪,77-回声测深仪,78-密度计。
具体实施方式
[0065]
下面结合附图,详细描述本发明的具体实施方案。
[0066]
如图1-5所示,一种大风浪海况下的船舶航行速度控制系统的控制方法,其中控制系统包括螺旋桨1、螺旋桨安装主轴2、薄片式压力传感器71,压力传感器保护罩4,控制系统5,船舶主机组件6,采集组件7以及运算器3;
[0067]
螺旋桨1安装于螺旋桨安装主轴2上,薄片式压力传感器71通过螺栓固连在螺旋桨安装主轴2上,且在薄片式压力传感器71的外侧设有压力传感器保护罩4,压力传感器保护罩4通过螺栓固连在螺旋桨安装主轴2上;
[0068]
采集组件7采集螺旋桨1、船舶主机组件6以及船舶周围海域的数据,并发送至运算器 4处理,运算器4把运算结果传输至控制系统5,控制系统5对船舶主机组件6实施控制;
[0069]
采集组件7包括薄片式压力传感器71、燃油压力传感器72、柴油机气缸表73、北斗卫星74以及海洋浮标75,薄片式压力传感器71用于测量、螺旋桨安装主轴2所处位置的压力,燃油压力传感器72安装于喷油器喷嘴内,用于测量喷油器喷嘴的燃油压力,柴油机气缸表73与柴油机气缸相连接,用于测量柴油机气缸压力;北斗卫星74用于采集船舶的ais 数据;
[0070]
海洋浮标75内设有海洋波谱仪76、回声测深仪77以及密度计78,海洋波谱仪76用于测量风浪的波高和波长,回声测深仪77用于测量风浪的水深,密度计78用于测量海水的密度;
[0071]
控制方法具体过程如下:
[0072]
步骤1:确定大风浪的描述方式
[0073]
采用有限振幅斯托克斯波理论描述海洋中的大风浪,其方程如下:
[0074][0075]
式中:η表示波面,波面至静水面的垂直距离;
[0076]
h表示波高,波谷底至波峰顶的垂直距离,可由海洋波谱仪测量获得;
[0077]
l表示波长,两个相邻波峰顶之间的水平距离,可由海洋波谱仪测量获得;
[0078]
h表示水深,静水面至海底的垂直距离,可由回声测深仪测量获得;
[0079]
k表示波数,δ表示波陡,
[0080]
步骤2:确定螺旋桨状态与压力之间的关系
[0081]
2.1:通过公式(2)计算当螺旋桨与海平面相切位置时,安装于螺旋桨安装主轴上的薄片式压力传感器处的临界压力p
临
:p
临
=ρ*g*h1ꢀꢀꢀ
(2)
[0082]
式中:ρ为当前海域海水密度,与海水温度、盐度有关,通过该海域内海洋浮标内的密度计测量获得;g为重力加速度,为已知量;h1为安装薄片式压力传感器的螺旋桨主轴距海平面的深度,通过测量船舶的吃水量计算获得;
[0083]
2.2:通过对比薄片式压力传感器测量的压力值p
测
与临界压力p
临
的大小,获得当前螺旋桨状态:
[0084][0085]
步骤3:确定船舶航速与螺旋桨转速关系
[0086]
以装载有海流计的海洋浮标为坐标原点,以船舶航行方向为纵坐标,以垂直于船舶航行方向为横坐标建立相对坐标系;
[0087]
3.1:海流流向与船舶航行方向的夹角θ为:θ=θ
2-θ1,其中,θ2为海流流向与地理坐标系的正北向间夹角,θ1为船舶航行方向与地理坐标系的正北向间夹角;
[0088]
3.2:计算由螺旋桨带动船舶行驶的航速v
′
船
:
[0089][0090]
式中,v1=|v
水
cosθ|;
[0091]
3.3:根据公式计算螺旋桨转速nr
′
与船舶航速v
′
船
关系如下:
[0092][0093]
式中,p
螺
为螺旋桨螺距,当螺旋桨确定时,该值也随之确定;λ为滑失比,为常数;由船员航行经验确定;
[0094]
步骤4:确定喷油量与转速关系
[0095]
4.1:在进行求解螺旋桨处于半入水状态时喷油量和转速间关系前,先进行样本数据采集:在大风浪工况下,船舶在规定航线之间多次航行采集样本数据簇
‑‑
[0096]
g1j(p
xj前
,p
zj前
,p
j测
,ρj,hj,lj,hj,θ2,v
水
,θ1,v
船
)
[0097]
(j为数据采集时刻,且为正整数),其中,p
xj前
为喷油器喷嘴的燃油压力,通过燃油压力传感器测量获得;p
zj前
为柴油机气缸压力,通过柴油机气缸表测量获得;p
j测
为压力值,通过薄片式压力传感器测量获得;ρj为当前海域海水密度,hj当前海域为波高,lj当前海域为波长,hj当前海域为水深,θ2当前海域为海流流向,v
水
当前海域为海流流速,均通过各海域内海洋浮标测量获得;θ1当前船舶航向,v
船
当前船舶航速,均通过ais数据获得;
[0098]
4.2:总控系统根据公式(1)计算各海域波面高度ηj,根据公式(2)计算各海域内薄片式压力传感器处的临界压力p
j临
,根据公式(4)和公式(5)计算船舶主机当前实际转速nr
j前
;根据公式(6)计算主机的喷油量q
j前
;把数据簇g1j简化为数据簇g2j(q
i前
,nr
j前
,p
j测
,p
j临
,ηj);
[0099][0100]
式中,ρ
x
为喷油器喷嘴的密度,为已知量;p
x
为喷油器喷嘴的燃油压力;pz为柴油机气缸压力;
[0101]ux
为喷嘴的流量系数,喷嘴型号确定时,该值随之确定;
[0102]ax
为喷嘴的截面积,喷嘴型号确定时,该值随之确定;
[0103]
4.3:总控系统遍历数据簇g2j,若p
j测
≥p
j临
,则保存该组数据,组成数据簇g3a;若p
j测
《p
j临
且(η
j-η
j-1
)》0,则保存该组数据,组成数据簇g4b;若p
j测
《p
j临
且 (η
j-η
j-1
)《0,则保存该组
数据,组成数据簇g5c;其中,数据簇g3a为螺旋桨处于全入水状态时的数据,数据簇g4b为螺旋桨处于波浪上升阶段半入水状态时的数据,数据簇g5c为螺旋桨处于波浪下降阶段半入水状态时的数据;0≤a≤j,0≤b≤j,0≤c≤j,且 a+b+c=j;
[0104]
4.4:总控系统通过调用matlab软件分别对数据簇g3a、g4b、g5c进行分析计算,获得喷油量q随转速n的变化关系式(7);
[0105][0106]
步骤5:对船舶航行速度进行控制
[0107]
5.1:预设船舶航行速度为v
航
;
[0108]
5.2:总控系统通过行驶海域内的海洋浮标测量获得当前海域的波高hi,当前海域的波长li,当前海域的水深hi,并根据公式(1)计算行驶海域的波面方程ηi;
[0109]
5.3:总控系统通过行驶海域内的海洋浮标测量获得当前海域的海水密度ρi,并根据公式(2)计算行驶海域的临界压力p
i临
;
[0110]
5.4:薄片式压力传感器每隔时间t测量一次螺旋桨安装主轴上的压力p
i测
;
[0111]
5.5:总控系统进行判断:若p
i测
≥p
i临
,则螺旋桨处于全入水状态,总控系统改变船舶主机的喷油量q,并通过公式q=f1(n)计算船舶主机的转速nri;若p
i测
《p
i临
且 (η
t-η
t-1
)》0,则螺旋桨处于波浪上升阶段的半入水状态,总控系统改变船舶主机的喷油量q,并通过公式q=f2(n)计算船舶主机的转速nri;若p
i测
《p
i临
且(η
t-η
t-1
)《0,则螺旋桨处于波浪下降阶段的半入水状态,总控系统改变船舶主机的喷油量q,并通过公式 q=f3(n)计算船舶主机的转速nri;
[0112]
5.6:总控系统通过行驶海域内的海洋浮标测量该海流流向θ
i2
和海流流速v
i水
;通过北斗获取该船舶的ais数据,包括当前船舶航向θ
i1
和当前船舶航速v
i船
;
[0113]
5.7:总控系统已知船舶主机转速nri,根据公式(5)反向求出由螺旋桨带动船舶行驶的航速vi′
船
;
[0114]
5.8:总控系统计算海流流向与船舶航行方向的夹角θi为θi=θ
i2-θ
i1
,并根据公式(4) 反向求得船舶实际的航行速度v
i航
;
[0115]
5.9:总控系统进行判断:|v
i船-v
i航
|≤
△
v是否成立,若成立,维持船舶主机当前喷油量不变,并执行步骤5.10;若不成立,总控系统调整喷油量q,并根据公式(7)计算主机的转速nri,并转至步骤5.6;
[0116]
5.10:总控系统通过北斗获取船舶所处海域并判断船舶是否驶入新的海域,若驶入新的海域,转至步骤5.2;若船舶仍处于当前海域,则转至步骤5.4。
[0117]
上述的实施例仅例示性说明本发明创造的原理及其功效,以及部分运用的实施例,而非用于限制本发明;应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1