一种利用喷流进行高空飞行器姿态控制的方法与流程
1.本发明涉及飞行器高空姿态控制领域,具体地,涉及一种利用喷流进行高空飞行器姿态控制的方法。
背景技术:
2.有翼飞行器飞行过程中,姿态控制常通过副翼、立尾、体襟翼等舵面偏转来实现。然而在高空条件下,来流稀薄,动压较低,舵面控制效率不足。通常需要借助于喷流反作用控制系统(rcs)进行姿态控制。
3.在真空条件下,喷流反作用力/力矩可以根据喷流条件直接确定。飞行器在大气中飞行,来流与喷流之间不可避免地会产生干扰效应,使得喷流打开前后飞行器表面的压力、摩阻等变量的分布发生改变。所以喷流打开条件下飞行器所受总的力和力矩一般并不等于无喷气动力/力矩与喷流反作用力/力矩之和。通常把有喷和无喷条件下飞行器力/力矩之间的差量称为喷流干扰力/力矩。喷流干扰力/力矩与喷流反作用力/力矩方向相同,意味干扰效应对喷流的反作用力/力矩有一个增加的作用。反之,干扰效应对喷流的反作用力/力矩是一个减弱的作用。衡量喷流控制效率的一个重要参数为喷流放大因子。该因子定义为喷流反作用力/力矩与喷流干扰力/力矩之和再除以喷流反作用力/力矩。精确的放大因子可以帮助飞行器控制系统保持飞行器姿态,确保飞行安全。
4.高空稀薄条件下的rcs干扰流场是一种典型的跨流域流动现象。高速飞行器处于稀薄大气环境中,在高压气室和接近喷口喉道的地方是连续流,喷口附近为过渡流,远离喷口位置为高度稀薄流。此时局部区域内连续性假设已经失效,飞行器表面出现滑移效应,喷流与边界层相互作用更引起的流动分离和流场结构均出现了变化,所以传统的流场预测手段(地面风洞试验和ns方程计算)无法精确捕捉到这种流动特征。统一气体动理学算法(unified gas kinetic scheme,ugks)则是现阶段比较成熟的一种跨流域多尺度方法,该方法可以实现连续流、过渡流与稀薄流的统一模拟,其物理空间网格不受分子自由程的限制,推进时间步长不受碰撞时间约束,没有概率论方法所固有的统计涨落的缺点,不需要对流场中的每个粒子的踪迹进行追踪,且在求解跨流域跨尺度问题时不存在分区或者方法之间的耦合,对模拟上述问题尤为适用。但是ugks方法需要在三维物理空间和三维速度空间同时进行离散以求解六维空间内的分布函数,所以需要的计算代价较大。
5.喷流与稀薄来流之间相互干扰产生的流场中,通常喷流与来流的压力比非常大(几百甚至上千)。喷流从喷口喷出之后,会迅速膨胀,导致速度增加,温度降低。从分布函数的角度来看,温度越低,分布函数在速度空间的分布就越集中。为了确保统一气体动理学方法能够顺利进行,需要确保低温区域对应的速度空间网格间距足够小,而现有的统一气体动理学方法在速度空间采用的是均匀网格。部分速度空间网格间距变小意味着整个速度空间间距都需要变小(即对网格进行加密处理),会带来巨大的计算量,也造成了不必要的浪费。
技术实现要素:
6.为了解决均匀加密速度空间网格带来的不必要的计算量的问题,本方法采用在速度空间进行局部加密以模拟喷流与高超声速稀薄来流干扰效应,采用本方法能够高效地获得喷流放大因子,进而控制飞行器的飞行姿态。
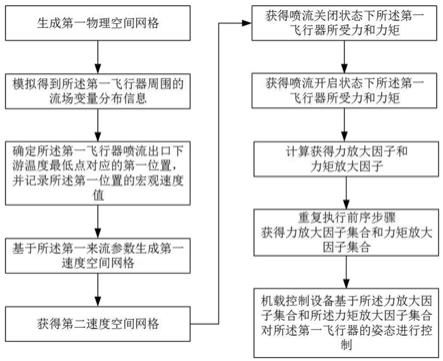
7.为实现上述目的,本发明提供了一种利用喷流进行高空飞行器姿态控制的方法,所述方法包括:步骤1:基于第一飞行器的外形形状参数和尺寸参数以及喷口位置生成第一飞行器表面网格,根据第一来流参数确定物理空间网格的外边界,在飞行器表面网格和外边界之间填充结构化网格,得到第一物理空间网格,可以采用通用的网格生成软件如gridgen、icem等;步骤2:基于所述第一物理空间网格、所述第一来流参数和所述第一喷流参数,模拟得到所述第一飞行器周围的流场变量分布信息;步骤3:基于所述流场变量分布信息获得空间流场温度分布信息,基于所述空间流场温度分布信息确定所述第一飞行器喷流出口下游温度最低点对应的第一位置,并记录所述第一位置的宏观速度值;步骤4:基于所述第一来流参数生成第一速度空间网格;步骤5:基于所述宏观速度值对所述的速度空间网格中的局部网格进行加密获得第二速度空间网格;步骤6:基于所述第一物理空间网格和所述第一速度空间网格,进行喷流关闭状态下所述第一飞行器周围流场的数值模拟,获得喷流关闭状态下所述第一飞行器所受力和力矩;步骤7:基于所述第一物理空间网格和所述第二速度空间网格,进行喷流开启状态下所述第一飞行器周围流场的数值模拟,获得喷流开启状态下所述第一飞行器所受力和力矩;步骤8:获得真空条件下喷流反作用力和力矩,基于所述和所述计算得到喷流干扰力,基于所述和所述计算得到喷流干扰力矩,基于所述和所述计算获得力放大因子,基于所述和所述计算获得力矩放大因子;步骤9:改变所述第一来流参数和所述第一喷流参数,重复所述步骤1至所述步骤8,汇总获得所有力放大因子和力矩放大因子,得到力放大因子集合和力矩放大因子集合;步骤10:将所述力放大因子集合和所述力矩放大因子集合输入所述第一飞行器的机载控制设备,所述机载控制设备基于所述力放大因子集合和所述力矩放大因子集合对所述第一飞行器的姿态进行控制。
8.其中,本方法原理为通过高效精确地模拟喷流与来流之间的干扰效应,获得准确
的喷流放大因子,进而采用喷流对飞行器高空飞行姿态进行控制。
9.本发明基于ns解算器的试算结果对速度空间网格进行局部加密处理,所有物理空间网格单元都采用相同的局部加密后的速度空间网格,以便于采用已有的隐式算法,实现了喷流与稀薄来流干扰效应的的高效模拟,获得了准确的喷流放大因子,进而实现采用喷流对飞行器高空飞行姿态进行控制。
10.优选的,所述步骤2具体包括:基于所述第一物理空间网格、所述第一来流参数和所述第一喷流参数,采用ns解算器进行模拟得到所述第一飞行器周围的流场变量分布信息。
11.其中,ns解算器虽然无法精确模拟喷流与稀薄来流之间干扰效应,但是能够快速得到一个大致的流场变量分布,便于为下面步骤中速度空间网格加密提供指导。
12.优选的,所述宏观速度值为vh,vh=(u
tmax
,v
tmax
,w
tmax
),其中,u
tmax
为x方向上的速度分量,v
tmax
为y方向上的速度分量,w
tmax
为z方向上的速度分量。
13.优选的,所述第一速度空间网格内每一维度上的网格点数为4n+1,n为自然数,所述第一速度空间网格由若干个子网格块组成,以(i,j,k)标记每一个子网格块,其中,i为三维速度空间u方向上网格分组编号,每个网格分组内包含5个网格节点,编号分别为:4i-3,4i-2,4i-1,4i,4i+1;。j为三维速度空间v方向上网格分组编号,每个网格分组内包含5个网格节点,编号分别为:4j-3,4j-2,4j-1,4j,4j+1;。k为三维速度空间w方向上网格分组编号,每个网格分组内包含5个网格节点,编号分别为:4k-3,4k-2,4k-1,4k,4k+1;。每一个子网格块内u、v、w三个方向各5个网格节点,共计5x5x5=125个网格节点。
14.优选的,所述步骤5具体包括:基于所述宏观速度值对所述的速度空间网格中的预设子网格块进行加密获得第二速度空间网格;所述预设子网格块标记为(i
tmax
,j
tmax
,k
tmax
),i
tmax
为宏观速度分量u
tmax
对应的速度空间网格中u方向上网格分组的编号,表明u
tmax
位于网格节点4i
tmax-3和网格节点4i
tmax
+1对应的速度值之间,j
tmax
为宏观速度分量v
tmax
对应的速度空间网格中v方向上网格分组的编号,表明v
tmax
位于网格节点4j
tmax-3和网格节点4j
tmax
+1对应的速度值之间,k
tmax
为宏观速度分量w
tmax
对应的速度空间网格中w方向上网格分组的编号,表明w
tmax
位于网格节点4k
tmax-3和网格节点4k
tmax
+1对应的速度值之间;具体求法如下:,,;其中,为对向下取整操作,为对向下取整操作,为对向下取整操作,为单个网格分组的宽度;对预设子网格块(i
tmax
,j
tmax
,k
tmax
)进行加密处理,由5x5x5分布变成9x9x9分布,即该子网格块内u、v、w每个方向上由原来5个网格节点增加为9个网格节点,新增节点位于原来相邻网格节点的中心位置。
15.对第一速度空间网格进行局部加密的原因是,第一速度空间网格仅仅是用来模拟
喷流关闭(无喷)状态。喷流打开以后,喷口下游出现低温区域,导致第一速度空间网格不够密,常常无法进行有喷状态的模拟。因而需要对局部进行加密。
16.优选的,所述力放大因子和所述力矩放大因子的计算方式分别为:;。
17.优选的,本方法通过第一来流参数和第一喷流参数获得所述和所述。计算方式为:;;其中,为喷流密度,为喷流速度,为喷流静压力,为来流静压力,为喷口面积,为由力矩参考点指向喷口中心点的力臂矢量。
18.优选的,将所述力放大因子集合和所述力矩放大因子集合输入所述第一飞行器的机载控制设备并存入控制设备数据库中,所述第一飞行器在飞行过程中,根据所述第一飞行器实时所受力和力矩确定需要额外施加的力和力矩,在所述控制设备数据库中选取相应的喷流参数对所述第一飞行器进行姿态控制。
19.优选的,所述第一来流参数包括:来流密度、来流速度和来流静压力,和所述第一喷流参数包括:喷流密度、喷流速度和喷流静压力。
20.优选的,所述流场变量分布信息包括:所述第一飞行器周围的密度、速度、压力和温度分布信息。
21.本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:由于在求解喷流与稀薄来流的流场过程中,所有的物理空间网格单元中使用了相同的局部加密的速度空间网格,便于采用现有的统一气体动理学隐式迭代算法,相对于以往的对速度空间均匀加密的做法而言,能够减少计算时间,节省计算内存,显著提高计算效率。同时由于抓住了问题的本质,在速度空间需要加密的地方(喷口下游低温位置区)进行了加密处理,确保了模拟结果准确。因此,本方法能够高效地获得喷流放大因子,进而控制飞行器的飞行姿态。
附图说明
22.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本发明的一部分,并不构成对本发明实施例的限定;图1为利用喷流进行高空飞行器姿态控制的方法的流程示意图。
具体实施方式
23.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在相互不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
24.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述范围内的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
实施例
25.请参考图1,图1为利用喷流进行高空飞行器姿态控制的方法的流程示意图,本发明实施例提供了一种利用喷流进行高空飞行器姿态控制的方法,所述方法包括:步骤1:针对某一特定飞行器的外形形状和尺寸和给定的来流和喷流条件,生成合适的物理空间网格。
26.步骤2:基于步骤1中生成的物理空间网格和给定的来流和喷流条件,采用ns解算器进行模拟,得到飞行器周围的密度、速度、压力、温度等流场变量分布。ns解算器的具体求解方法可以参考如下文献:阎超. 计算流体力学方法及应用[m]. 北京: 北京航空航天大学出版社, 2006.本步骤2中采用的ns解算器是无法精确模拟喷流与稀薄来流之间干扰效应的。我们这样做的目的是快速得到一个大致的流场变量分布,为下面步骤中速度空间网格加密提供指导。
[0027]
步骤3:根据步骤2得到的空间流场温度分布,确定喷流出口下游温度最低点的位置,记下该位置的宏观速度值(u
tmax,vtmax,wtmax
)。
[0028]
步骤4:根据给定的来流条件,生成统一气体动理学方法模拟所需要的速度空间网格。喷流与稀薄来流干扰问题中,速度空间网格常采用均匀分布,每一维度空间的上下限通常分别取2.5及-2.5。三个维度方向上采用相同的网格点数。对分布函数在速度空间进行数值积分一般采用newton-cotes公式。依据该积分公式特点,速度空间内每一维度上的网格点数为4n+1,n为自然数。在计算高空喷流与稀薄来流的问题中,n至少要取大于20以确保模拟精度。这样生成的速度空间网格可以看成是若干个5x5x5的子网格块组合而成。以(i,j,k)来标记每一个子网格块。,,。
[0029]
步骤5:根据步骤3中温度最低点对应的宏观速度值,对步骤4中生成的速度空间网格进行局部加密处理。需要进行局部加密的子网格块标记为(i
tmax,jtmax,ktmax
)。i
tmax,jtmax,ktmax
取法如下:,’floor’代表对
‘’
向下取整操作。按如下公式计算:同样地,有,。
[0030]
将子网格块(i
tmax,jtmax,ktmax
)由5x5x5的分布变成9x9x9的分布,即该子网格块内u、v、w每个方向上由原来5个网格节点增加为9个网格节点,新增节点位于原来相邻网格节点的中心位置。
[0031]
步骤6:基于步骤1中生成的物理空间网格和步骤4中生成的均匀分布的速度空间网格,采用统一气体动理学隐式迭代方法进行喷流关闭状态下飞行器周围流场的数值模拟。详细求解方法参考如下文献之4.3节。江定武. 基于模型方程解析解的气体动理学算法研究,中国空气动力研究与发展中心博士论文,2016年6月。通过本步骤得到无喷状态下飞行器所受力和力矩。
[0032]
步骤7:基于步骤1中生成的物理空间网格和步骤5中生成的局部加密的速度空间网格,采用统一气体动理学隐式迭代方法进行喷流与来流干扰效应的精确模拟。详细求解方法参考如下文献之4.3节。江定武. 基于模型方程解析解的气体动理学算法研究,中国空气动力研究与发展中心博士论文,2016年6月。通过本步骤得到有喷状态下飞行器所受力和力矩。
[0033]
步骤8:有喷状态下飞行器所受力和力矩减去无喷状态下飞行器所受力和力矩得到喷流干扰力和力矩。利用下式得到力放大因子和力矩放大因子。
[0034]
,其中和分别为真空条件下喷流反作用力和力矩,可以根据来流条件和喷流条件得到。
[0035]
步骤9:改变喷流和来流条件,重复步骤1-步骤8,直至得到所有可能用到的喷流工作状态的力和力矩放大因子。
[0036]
步骤10:将所有状态的力/力矩放大因子数据汇总,输入飞行器机载控制设备。在飞行过程中,根据飞行器实时所受力和力矩确定需要额外施加的力和力矩,进而在控制设备数据库中选取合适的喷流参数进行姿态控制。
[0037]
由于在求解喷流与稀薄来流的流场过程中,所有的物理空间网格单元中使用了相同的局部加密的速度空间网格,便于采用现有的统一气体动理学隐式迭代算法。本发明的技术效果如下:可以在局部加密的速度空间网格上直接采用已有的隐式算法,能够减少计算时间,节省计算内存,显著提高计算效率。
[0038]
为了更加清楚明白的描述本文的目的、方案以及优势。下面,采用以上方法对二维钝锥外形上喷流与稀薄来流干扰效应进行模拟。
[0039]
来流条件为:,喷流与来流静压比2032;根据温度分布确定了喷流出口下游温度最低点位置,对速度空间进行局部加密处理。原有速度空间均匀网格间距(相邻两个网格节点之间的距离)为0.042。局部加密位置网格间距为0.021。
[0040]
为了验证本发明的效果,对速度空间网格均匀加密一层(间距0.021)的状态也进
行了计算。通过实验结果能够验证二者结果吻合很好。局部加密的网格点数量仅为均匀加密网格点数量的约1/4。采用局部加密速度空间网格节省了计算内存和计算时间,是一种高效的加速方法。
[0041]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0042]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1