一种基于扰动抑制预测控制的火电机组协调控制方法与流程
1.本发明涉及燃煤发电技术领域,具体涉及一种基于扰动抑制预测控制的火电机组协调控制方法。
背景技术:
2.目前,火电机组协调控制系统大多基于传统pid控制策略进行设计,采用了负荷指令前馈+pid反馈的调节方案。但是对于煤种多变、机组控制及测量设备不精确、运行参数经常与设计参数存在较大偏差的情况下,常规控制手段已难以保证控制品质,控制效果会明显变差。因此需要设计一种能够快速抑制扰动的先进的协调控制策略。
技术实现要素:
3.本发明的目的是提供一种基于扰动抑制预测控制的火电机组协调控制方法,既能保证设定值的跟踪能力,又能实现快速扰动抑制,优化协调系统控制品质。
4.技术方案:为实现上述发明目的,本发明采用如下技术方案:
5.一种基于扰动抑制预测控制的火电机组协调控制方法,该方法包括以下的步骤:
6.步骤s1:根据预测模型建立输出被调量的预测方程;
7.步骤s2:采用性能指标函数优化计算输入控制量;
8.步骤s3:引入设定值滤波器对参考设定值进行过渡处理。
9.进一步地,所述步骤s1中所述预测模型采用受控自回归滑动平均模型,具体表示为:
[0010][0011]
其中,a、b、c分别为关于后移算子z-1
的多项式;y为预测输出被调量;u为输入控制量;θ为可测扰动量;ξ为零均值白噪声序列;δ=1-z-1
为差分算子;t为采样时刻。
[0012]
更进一步地,步骤s1中所述根据预测模型建立输出被调量的预测方程,具体表示为:
[0013][0014]
其中,为输出预测向量;δu为输入控制增量向量;δθ扰动增量向量;ζ为自由响应系数向量;g和h为系统矩阵。
[0015]
进一步地,所述步骤s2中所述性能指标函数采用控制时域内的控制序列最小化为目标,具体表示为:
[0016][0017]
其中,式中,为基于当前t时刻已知信息预测将来k个采样周期的被控量输出值;r(t+k)为对应时刻的参考设定值序列;δu(t+k-1)为t+k-1时刻的控制增量值;n
p1
与np2
分别为预测时域的起点时刻与终点时刻;nc为控制时域,即需求解的控制步数,λ(k)为控制增量加权序列。
[0018]
进一步地,所述步骤s3中所述引入设定值滤波器,参考设定的过渡值是通过采用闭环动态特性与期望的设定值动态过渡过程之间的计算得出,具体表示为:
[0019][0020]
其中,ψ为滤波器;和为滤波因子。
[0021]
优选地,的取值在0到1之间。
[0022]
更进一步地,预测控制器的控制输出计算基于通过最小化性能指标j,得出最优的控制量序列u(t),u(t+1),
…
u(t+nc-1),通过反馈校正实现预测模型的输出预测趋近于设定值r(t+k),仅仅将u(t)应用于实际控制,后续再重复计算,实现滚动优化。
[0023]
本发明具有以下的有益效果:
[0024]
本发明能够有效提升火电机组协调系统抗扰动的能力,能够解决火电机组协调控制系统中控制作用速率、幅值的受限优化问题,且控制快速、准确,控制性能优异,机组运行稳定可靠。
附图说明
[0025]
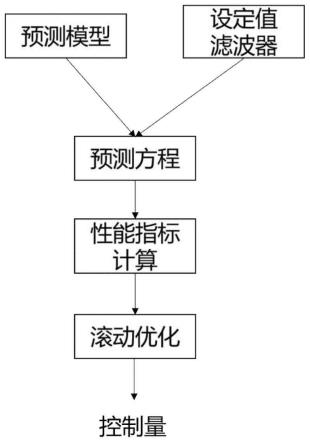
图1是本发明的控制原理图。
具体实施方式
[0026]
为了使本发明要解决的技术问题、技术方案和有益效果更加清楚,下面结合附图及具体实施例进行详尽的描述。
[0027]
本发明公开了一种基于扰动抑制预测控制的火电机组协调控制方法,如附图1所示,该方法包括以下的步骤:
[0028]
步骤s1:根据预测模型建立输出被调量的预测方程;
[0029]
步骤s2:采用性能指标函数优化计算输入控制量;
[0030]
步骤s3:引入设定值滤波器对参考设定值进行过渡处理。
[0031]
进一步地,所述步骤s1中所述预测模型采用受控自回归滑动平均模型,具体表示为:
[0032][0033]
其中,a、b、c分别为关于后移算子z-1
的多项式;y为预测输出被调量;u为输入控制量;θ为可测扰动量;ξ为零均值白噪声序列;δ=1-z-1
为差分算子;t为采样时刻。
[0034]
更进一步地,步骤s1中所述根据预测模型建立输出被调量的预测方程,具体表示为:
[0035][0036]
其中,为输出预测向量;δu为输入控制增量向量;δθ扰动增量向量;ζ为自由响应系数向量;g和h为系统矩阵。
[0037]
进一步地,所述步骤s2中所述性能指标函数采用控制时域内的控制序列最小化为目标,具体表示为:
[0038][0039]
其中,式中,为基于当前t时刻已知信息预测将来k个采样周期的被控量输出值;r(t+k)为对应时刻的参考设定值序列;δu(t+k-1)为t+k-1时刻的控制增量值;n
p1
与n
p2
分别为预测时域的起点时刻与终点时刻;nc为控制时域,即需求解的控制步数,λ(k)为控制增量加权序列。
[0040]
进一步地,所述步骤s3中所述引入设定值滤波器,参考设定的过渡值是通过采用闭环动态特性与期望的设定值动态过渡过程之间的计算得出,具体表示为:
[0041][0042]
其中,ψ为滤波器;和为滤波因子。
[0043]
优选地,的取值在0到1之间。
[0044]
更进一步地,预测控制器的控制输出计算基于通过最小化性能指标j,得出最优的控制量序列u(t),u(t+1),
…
u(t+nc-1),通过反馈校正实现预测模型的输出预测趋近于设定值r(t+k),仅仅将u(t)应用于实际控制,后续再重复计算,实现滚动优化。
[0045]
下面以某电厂660mw超临界机组协调系统为例,采用本发明的协调控制策略,详细说明本发明内容。在300mw~390mw之间进行了多次大幅变负荷试验,预测控制器参数设置如表1所示。试验期间,负荷基本跟踪设定值变化,主汽压力和过热汽温控制均非常稳定,主汽压力最大动态偏差仅为+0.34mpa/-0.4mpa,过热汽温最大动态偏差仅为+3.3℃/-3.1℃。
[0046]
表1预测控制器参数设置
[0047][0048][0049]
以上实例表明:本发明所述的一种基于扰动抑制预测控制的协调控制策略,可有效提升大型火电机组协调控制系统在大工况范围内的控制品质,控制系统响应速度快、稳定性能好、准确性高,同时具有良好的鲁棒性和扰动抑制能力。
[0050]
以上实施例仅为本发明的优选实施例,仅用于更加清楚地说明本发明方法,并非对本发明作任何其他形式的限制,应当指出的是,对于本领域一般技术而言,在不背离本发明原理和精神的前提下对其所做出的任何显而易见的改动,都应该包含在本发明的权利要
求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1