一种高轨卫星防撞方法及系统与流程
1.本发明涉及航天技术领域,尤其涉及一种高轨卫星防撞方法及系统。
背景技术:
2.高轨卫星通常运行在地球静止轨道上,可执行不同轨道机动任务。在执行轨道机动任务时,高轨卫星的运行模式通常可包括:漂移模式、抵近模式和伴飞模式。其中漂移模式包括:高轨卫星在偏离预定轨道的一定范围内运行,适用情景如高轨卫星在一定范围内执行侦察任务;抵近模式包括:高轨卫星抵近特定目标如目标卫星,适用场景如高轨卫星对特定目标进行拍照工作;伴飞模式包括:高轨卫星与目标卫星长时间运行在相同高度、相同偏心率等相同轨道参数的空间内,适用场景如高轨卫星对目标卫星进行维修、加注等在轨操作。
3.上述三种轨道机动模式下,会出现卫星间相撞的可能性,而卫星相撞事件是肯定需要尽可能避免的。
4.对于执行轨道机动任务的高轨卫星,现有技术通常针对在高轨卫星处于正常运行状态下时作出防撞机制,如:通过计算两星相撞的概率来判断两星相撞的可能性,以制定并执行相应的防撞措施。
5.上述现有技术只给出卫星正常运行下的防撞方案,而对于高轨卫星处于异常状况的情况,现有技术并没有给出解决方案。
技术实现要素:
6.鉴于上述的分析,本发明旨在提供一种高轨卫星防撞方法及系统,解决上述现有技术没有解决的高轨卫星处于异常状况时的防撞技术问题。
7.本发明提供的技术方案是:
8.一方面,本发明提供一种高轨卫星防撞方法,包括:
9.地面控制系统监测处于预定轨道机动模式下的高轨卫星的运行状况,在监测到所述运行状况不符合预设时,向所述高轨卫星发送操作禁止指令;所述操作禁止指令用于指示所述高轨卫星禁止执行用于控制所述高轨卫星运行的操作;
10.所述高轨卫星接收所述操作禁止指令,停止执行用于控制所述高轨卫星运行的操作;
11.所述地面控制系统监测到所述高轨卫星停止执行用于控制所述高轨卫星运行的操作后,根据预设防撞策略,控制所述高轨卫星的运行;所述防撞策略对应处理所述运行状况不符合预设。
12.优选地,所述用于控制所述高轨卫星运行的操作包括:所述高轨卫星上推进系统控制的喷气操作;所述根据预设防撞策略,控制所述高轨卫星的运行包括:
13.所述地面控制系统发送用于指示所述高轨卫星按所述防撞策略执行防撞操作的防撞操作指令;
14.所述高轨卫星收到所述防撞操作指令后,按所述防撞策略控制执行相应的喷气操作。
15.优选地,所述防撞操作指令包括:
16.指示执行按所述防撞策略制定的喷气操作;
17.所述按所述防撞策略控制执行相应的喷气操作包括:
18.所述高轨卫星执行相应的喷气操作,改变自身运动轨迹。
19.优选地,所述监测到所述运行状况不符合预设包括:监测到所述高轨卫星上跟瞄系统故障;
20.所述防撞策略包括:第一防撞策略;
21.所述第一防撞策略包括:若监测到所述跟瞄系统故障,则指示所述高轨卫星限制每轨喷气量;
22.所述防撞操作指令具体为:
23.指示限制所述高轨卫星每轨喷气量;
24.所述高轨卫星执行相应的喷气操作,改变自身运动轨迹包括:
25.所述高轨卫星根据收到的所述防撞操作指令,依受限的每轨喷气量执行喷气操作。
26.优选地,所述监测到所述运行状况不符合预设包括:
27.所述地面控制系统在预设时间段内监测不到基于所述跟瞄系统获得的所述高轨卫星的位置信息;
28.所述防撞策略还包括:第二防撞策略;
29.所述第二防撞策略包括:
30.若在预设时间段内监测不到基于所述跟瞄系统获得的所述高轨卫星的位置信息,则所述地面控制系统根据监测到的目标卫星位置信息,指示所述高轨卫星向偏离所述目标卫星的方向撤离;
31.所述防撞操作指令具体为:
32.指示所述高轨卫星向偏离所述目标卫星的方向撤离;
33.所述高轨卫星执行相应的喷气操作,改变自身运动轨迹包括:
34.所述高轨卫星根据收到的所述防撞操作指令,执行指向性喷气操作,向偏离所述目标卫星的方向撤离。
35.优选地,所述运行状况不符合预设包括:所述高轨卫星姿态相对于其所在轨道面的夹角在第一预设值域间;
36.所述防撞策略还包括:第三防撞策略;
37.所述第三防撞策略包括:若监测到所述高轨卫星姿态相对于其所在轨道面的夹角在第一预设值域间,则控制所述高轨卫星前进或后退方向的喷气量;
38.所述防撞操作指令具体为:
39.指示控制所述高轨卫星前进或后退方向的喷气量;
40.所述高轨卫星执行相应的喷气操作,改变自身运动轨迹包括:
41.所述高轨卫星根据收到的所述防撞操作指令,控制前进或后退方向的喷气量,降低或升高所述高轨卫星所在轨道高度。
42.优选地,所述监测到所述运行状况不符合预设还包括:
43.所述地面控制系统监测到所述高轨卫星与目标卫星间的距离小于预设安全距离阈值;
44.所述防撞策略还包括:第四防撞策略;
45.所述第四防撞策略包括:所述地面控制系统监测到所述高轨卫星与目标卫星间的距离小于预设安全距离阈值,依据其中y为以目标卫星为参考点的坐标中,垂直于所述目标卫星所在轨道面方向上,所述高轨卫星的位置数据;z为所述坐标中,径向方向上所述高轨卫星的位置数据;r
safe
为所述预设安全距离阈值,计算满足所述条件的y和z的值;指示所述高轨卫星根据算出的y和z的值,在垂直于所述高轨卫星所在轨道面方向上执行喷气操作;
46.所述防撞操作指令具体为:
47.指示所述高轨卫星根据算出的y和z的值,在垂直于所述高轨卫星所在轨道面方向上执行喷气操作;
48.所述高轨卫星执行相应的喷气操作,改变自身运动轨迹包括:
49.所述高轨卫星接收指示,根据算出的y和z的值,在垂直于所述高轨卫星所在轨道面方向上执行喷气操作,调整所述高轨卫星与目标卫星之间的相对位置。
50.优选地,所述运行状况不符合预设包括:所述高轨卫星姿态相对于其所在轨道面的夹角在第二预设值域间;
51.所述防撞操作指令包括:指示禁止执行所述喷气操作;
52.所述防撞策略还包括:第五防撞策略;
53.所述第五防撞策略包括:
54.若所述地面控制系统监测到所述运行状况不符合预设,则指示禁用所述推进系统;
55.所述高轨卫星收到所述防撞操作指令后,按所述防撞策略控制执行相应的喷气操作包括:
56.所述高轨卫星收到指示后,关闭所述推进系统。
57.优选地,所述地面控制系统监测高轨卫星的运行状况前,所述防撞方法还包括:
58.在所述高轨卫星上预设用于指示所述高轨卫星执行防撞操作的自主防撞策略;
59.所述自主防撞策略包括:若所述高轨卫星监测所述高轨卫星与目标卫星间的位置信息,预测预设时间内两星之间的距离,若小于预设阈值,则改变自身运动轨迹;
60.所述高轨卫星利用所述自主防撞策略,控制自身的运行。
61.另一方面,本发明还提供一种高轨卫星防撞系统,包括:地面控制系统和高轨卫星;
62.所述地面控制系统,适于监测处于预定轨道机动模式下的高轨卫星的运行状况,在监测到所述运行状况不符合预设时,向所述高轨卫星发送操作禁止指令;所述操作禁止指令用于指示所述高轨卫星禁止执行用于控制所述高轨卫星运行的操作;
63.所述高轨卫星,适于接收所述地面控制系统发送的操作禁止指令,停止执行用于控制所述高轨卫星运行的操作;
64.所述地面控制系统,适于监测到所述高轨卫星停止执行用于控制所述高轨卫星运行的操作后,根据预设防撞策略,控制所述高轨卫星的运行;所述防撞策略对应处理所述运行状况不符合预设。
65.本发明至少可实现以下有益效果之一:
66.本发明具体实现中,在地面控制系统监测到高轨卫星的运行状况不符合预设的情况下,如高轨卫星自身故障等,由地面控制系统暂停高轨卫星对自身运行的控制,并基于具体情况,由地面控制系统接管对高轨卫星运行的控制,可实现异常情况下对高轨卫星运行的控制,从而有效降低卫星间相撞的可能性。
67.另外,本发明中,基于在高轨卫星自身上设置自主防撞策略,提高高轨卫星自身防撞抵御能力,有效降低卫星间相撞的可能性。
附图说明
68.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
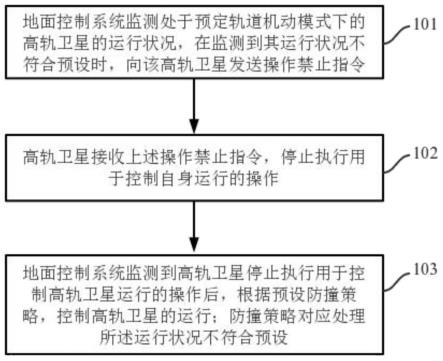
69.图1是本发明实施例一中高轨卫星防撞方法流程图;
70.图2是本发明实施例二中高轨卫星防撞方法流程图;
71.图3是本发明实施例三中高轨卫星防撞方法流程图;
72.图4是本发明实施例四中高轨卫星防撞方法流程图;
73.图5是本发明实施例五中高轨卫星防撞方法流程图;
74.图6是本发明实施例六中高轨卫星防撞方法流程图;
75.图7是本发明实施例中弹簧式防撞示意图之一;
76.图8时本发明实施例中弹簧式防撞示意图之二;
77.图9是本发明实施例七中高轨卫星防撞方法流程图;
78.图10是本发明实施例八中高轨卫星实现自主防撞的流程图;
79.图11是本发明实施例九中高轨卫星防撞系统的结构示意图;
80.图12是本发明实施例十中地面控制系统1101和高轨卫星1102的结构示意图;
81.图13是本发明实施例十一中高轨卫星1102的结构示意图;
82.图14是本发明实施例十二中高轨卫星防撞系统1100的结构示意图。
具体实施方式
83.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理。
84.本发明实施例提供一种高轨卫星防撞方法及系统。
85.参见图1,图1是本发明实施例一中高轨卫星防撞方法流程图,该流程可包括以下步骤:
86.步骤101:地面控制系统监测处于预定轨道机动模式下的高轨卫星的运行状况,在监测到其运行状况不符合预设时,向该高轨卫星发送操作禁止指令。
87.运行状况包括:高轨卫星跟瞄系统运行状况、高轨卫星运行姿态状况、与目标卫星间的间距大小等;运行状况不符合预设说明卫星出现异常状况。
88.本发明实施例中,操作禁止指令用于指示高轨卫星禁止执行用于控制该高轨卫星运行的操作。
89.具体地,用于控制所述高轨卫星运行的操作包括:高轨卫星上推进系统控制的喷气操作。
90.本发明实施例中,轨道机动模式可包括:漂移模式、抵近模式和伴飞模式。
91.步骤102:高轨卫星接收上述操作禁止指令,停止执行用于控制自身运行的操作。
92.步骤103:地面控制系统监测到所述高轨卫星停止执行用于控制所述高轨卫星运行的操作后,根据预设防撞策略,控制所述高轨卫星的运行,防撞策略对应处理所述运行状况不符合预设。
93.具体实现中,通过喷气操作可改变高轨卫星的轨道参数,如,轨道半长轴、偏心率等,从而改变高轨卫星的运动轨迹。
94.具体实施中,喷气操作通常在某个方向上执行,x方向为高轨卫星的前进方向,y方向为垂直于高轨卫星所在轨道面方向,z方向为地球与该高轨卫星连线方向。喷气操作可包括:在某个或某几个方向上进行喷气操作,以改变高轨卫星的运行。
95.本发明实施例中,在地面控制系统监测到高轨卫星的运行状况不符合预设的情况下,如高轨卫星自身故障等,由地面控制系统暂停高轨卫星对自身轨控推力的操作,并基于具体情况,操控高轨卫星的运行,可实现异常情况下,对高轨卫星运行的控制,从而有效降低卫星间相撞的可能性。
96.参见图2,图2是本发明实施例二中高轨卫星防撞方法流程图,该流程可包括以下步骤:
97.步骤201:地面控制系统监测处于预定轨道机动模式下的高轨卫星的运行状况,在监测到其运行状况不符合预设时,向该高轨卫星发送操作禁止指令。
98.步骤202:高轨卫星接收上述操作禁止指令,停止执行喷气操作。
99.上述步骤103可包括以下步骤203和步骤204:
100.步骤203:地面控制系统监测到高轨卫星停止执行喷气操作后,发送用于指示高轨卫星按预设防撞策略执行防撞操作的防撞操作指令。
101.本发明实施例中,地面控制系统可基于相关终端监测高轨卫星的喷气操作,并由地面控制系统接管高轨卫星的运行,有效控制高轨卫星的运行。
102.步骤204:高轨卫星收到上述防撞操作指令后,按所述防撞策略控制执行相应的喷气操作。
103.具体实施中,防撞操作指令可包括:
104.指示执行按所述防撞策略制定的喷气操作;或,指示禁用推进系统。
105.对于指示可执行所述喷气操作的情况,高轨卫星可通过执行相应的喷气操作,改变自身运动轨迹。
106.参见图3,图3是本发明实施例三中高轨卫星防撞方法流程图,该流程可包括以下步骤:
107.步骤301:地面控制系统监测到高轨卫星上跟瞄系统故障,向该高轨卫星发送操作禁止指令。
108.本实施例中,地面控制系统监测到高轨卫星运行状况不符预设的情况是,监测到
高轨卫星上跟瞄系统故障。其中,跟瞄系统可用于定位卫星的位置信息,一旦跟瞄系统故障,则可能导致卫星间相对距离和方位测量不准确,从而使地面控制系统或高轨卫星难以获得正确的位置导航信息,难以控制高轨卫星的运行,从而难以完成各种轨道机动任务的执行。
109.具体实施中,若地面控制系统监测到跟瞄系统给出的位置数据发生跳变,或者,若将监测到的高轨卫星的位置数据与获得的遥测数据进行对比时,发现对比结果中,两数据差超出预设值,则可确认为跟瞄系统故障。
110.步骤302:高轨卫星接收上述操作禁止指令,停止执行喷气操作。
111.步骤303:地面控制系统根据预设的第一防撞策略,发送防撞操作指令,防撞操作指令指示限制高轨卫星每轨喷气量。
112.上述第一防撞策略包括:若监测到跟瞄系统故障,则指示高轨卫星限制每轨喷气量。其中,每轨喷气量是高轨卫星运行一个时间周期的喷气量。
113.步骤304:高轨卫星根据收到的防撞操作指令,依受限的每轨喷气量执行喷气操作。
114.具体实施中,地面控制系统通过限制并监视高轨卫星的每轨喷气量,在导航信息不确定的情况下,谨慎控制高轨卫星的运行,可有效降低因故障导致的两星相撞的可能性。
115.参见图4,图4是本发明实施例四中高轨卫星防撞方法流程图,该流程可包括以下步骤:
116.步骤401:地面控制系统在预设时间段内监测不到基于跟瞄系统获得的高轨卫星的位置信息,向该高轨卫星发送操作禁止指令。
117.本实施例中,地面控制系统监测到跟瞄系统故障,判断跟瞄系统失效,也可采取撤离方式避免高轨卫星与目标卫星相撞。
118.步骤402:高轨卫星接收上述操作禁止指令,停止执行喷气操作。
119.步骤403:地面控制系统基于第二防撞策略,根据监测到的目标卫星位置信息,发送防撞操作指令,防撞操作指令指示高轨卫星向偏离目标卫星的方向撤离。
120.上述第二防撞策略包括:若预设时间段内监测不到基于跟瞄系统获得的高轨卫星的位置信息,则地面控制系统根据监测到的目标卫星位置信息,指示所述高轨卫星向偏离所述目标卫星的方向撤离。
121.步骤404:高轨卫星根据收到的指示,执行指向性喷气操作,向偏离目标卫星的方向撤离。
122.本实施例中,高轨卫星通过上述撤离操作,拉开与目标卫星的距离,有效降低两星碰撞可能性。
123.参见图5,图5是本发明实施例五中高轨卫星防撞方法流程图,该流程可包括以下步骤:
124.步骤501:地面控制系统监测到高轨卫星姿态参数不符预设,即高轨卫星姿态相对于其所在轨道面的夹角在第一预设值域间,向该高轨卫星发送操作禁止指令。
125.具体实施中,第一预设值域间可设置在5
°
到18
°
之间,若监测到高轨卫星上姿态敏感器数据发生跳变,如从小值跳变到5
°
,或直接监测到上述夹角在第一预设值域间,则可判定高轨卫星出现姿态超差异常情况。
126.步骤502:高轨卫星接收上述操作禁止指令,停止执行喷气操作。
127.步骤503:地面控制系统基于第三防撞策略,发送防撞操作指令,防撞操作指令指示控制高轨卫星前进方向喷气量。
128.上述第三防撞策略可包括:若监测到上述夹角在第一预设值域间,则控制高轨卫星前进方向的喷气量。具体实施中,也可发送要求控制高轨卫星后退方向的喷气量的指示,抬高自身运行轨道高度。
129.步骤504:高轨卫星根据收到的指示,控制前进方向的喷气量,降低自身运行轨道高度,拉开与目标卫星之间的距离。
130.实际应用中,由于上述夹角通常较小,而5
°
相对来讲已经是一个很大值,为防止碰撞的发生,可采取降低或升高自身运行轨道高度的做法,撤离当前所在位置,降低碰撞可能性。其中,可通过控制后退方向的喷气量,升高高轨卫星所在轨道高度。
131.参见图6,图6是本发明实施例六中高轨卫星防撞方法流程图,该流程可包括以下步骤:
132.步骤601:地面控制系统监测到高轨卫星与目标卫星间的距离小于预设安全距离阈值,向该高轨卫星发送操作禁止指令。
133.步骤602:高轨卫星接收上述操作禁止指令,停止执行喷气操作。
134.步骤603:地面控制系统根据预设第四防撞策略,发送防撞操作指令,防撞操作指令指示高轨卫星根据算出的位置数据,在垂直于高轨卫星所在轨道面方向上执行喷气操作。
135.上述第四防撞策略包括:地面控制系统监测到高轨卫星与目标卫星间的距离小于预设安全距离阈值,依据其中y为以目标卫星为参考点的坐标中,垂直于目标卫星所在轨道面方向上,所述高轨卫星的位置数据;z为所述坐标中,径向方向上,高轨卫星的位置数据;r
safe
为预设安全距离阈值,计算满足条件的y和z的值;指示高轨卫星根据算出的y和z的值,在垂直于高轨卫星所在轨道面方向上执行喷气操作。
136.步骤604:高轨卫星接收防撞操作指令,根据算出的y和z的值,在垂直于高轨卫星所在轨道面方向上执行喷气操作,调整高轨卫星与目标卫星之间的相对位置。
137.本实施例实际提供一种“弹簧式”防撞方案,在如抵近或伴飞模式下,通过实时算出的y和z的值,不断调整高轨卫星与目标卫星之间的相对位置,可使得高轨卫星绕目标卫星运行穿越时,也存在一定的距离隔离度,从而有效避免碰撞的发生。参见图7,图7是本发明实施例中弹簧式防撞示意图之一,该图7是从目标卫星为参考点的坐标中,x方向上看到的穿越示意图。参见图8,图8时本发明实施例中弹簧式防撞示意图之二,该图8是从目标卫星为参考点的坐标中,z方向上看到的穿越示意图。其中,高轨卫星设为我星。
138.参见图9,图9是本发明实施例七中高轨卫星防撞方法流程图,该流程可包括以下步骤:
139.步骤901:地面控制系统监测到高轨卫星姿态参数不符预设,即高轨卫星姿态相对于其所在轨道面的夹角在第二预设值域间,向该高轨卫星发送操作禁止指令。
140.具体实施例中,可设置第二预设值域间如3
°
到5
°
之间,或18
°
以上。实际应用中,对于0
°
到3
°
的夹角值域,可暂时不处理;对于3
°
到5
°
的夹角值域,可暂时禁用推进系统,检查
出现的问题;对于5
°
到18
°
的夹角值域,可设置上述撤离措施;而对于18
°
以上的夹角值域,可设置关闭推进系统的措施。
141.步骤902:高轨卫星接收上述操作禁止指令,停止执行喷气操作。
142.步骤903:地面控制系统基于第五防撞策略,发送防撞操作指令,防撞操作指令指示高轨卫星禁止执行喷气操作。
143.本实施例中,第五防撞策略包括:若地面控制系统监测到高轨卫星姿态相对于所述高轨卫星所在轨道面的在第二预设值域间,则指示禁用高轨卫星的推进系统。
144.步骤904:高轨卫星根据收到的防撞操作指令,关闭其推进系统。
145.参见图10,图10是本发明实施例八中高轨卫星实现自主防撞的流程图,该流程可包括以下步骤:
146.步骤1001:在高轨卫星上预设用于指示高轨卫星执行防撞操作的自主防撞策略。
147.步骤1002:高轨卫星利用自主防撞策略,控制自身的运行。
148.具体实施中,如在漂移模式或在抵近模式下,可预设自主防撞策略,包括:若高轨卫星监测高轨卫星与目标卫星间的位置信息,预测预设时间内两星之间的距离,若小于预设阈值,则改变自身的运动轨迹。具体应用如:设定两星定位误差总和不大于2.3km,设定高轨卫星与目标卫星之间的安全距离为10km,即上述预设阈值,如果通过测定并进行轨迹外推,预测一至两天内两星之间的相对距离,一旦出现相对距离小于10km的情况,则高轨卫星可通过控制其上的喷气操作,调整该高轨卫星的半长轴或偏心率,改变该高轨卫星的运动轨迹。
149.本发明应用场景如,漂移模式中,采取低于准同步轨道50km,高于准同步轨道100km的轨道运行。漂移模式的应用场景示意如,下漂50km的情况下,设计高轨卫星的偏心率小于0.0001,测轨精度约300m,设计高轨卫星运行轨迹的包络短半轴为5km,则,在高轨卫星的漂移过程中,与包络带中的目的卫星不存在碰撞风险。本发明另一应用场景如伴飞模式下,星上跟瞄系统与相对导航能力大于100km,距离分辨率优于15m,两星安全伴飞距离可设置在3~30km间。
150.对应于上述高轨卫星防撞方法,本发明实施例还提供一种高轨卫星防撞方法系统,参见图11,图11是本发明实施例九中高轨卫星防撞系统的结构示意图,该高轨卫星防撞系统1100可包括:地面控制系统1101和高轨卫星1102,其中,
151.地面控制系统1101,适于监测处于预定轨道机动模式下的高轨卫星1102的运行状况,在监测到运行状况不符合预设时,向高轨卫星1102发送操作禁止指令;操作禁止指令用于指示高轨卫星1102禁止执行用于控制所述高轨卫星运行的操作;
152.高轨卫星1102,适于接收地面控制系统1101发送的操作禁止指令,停止执行用于控制其自身卫星运行的操作;
153.地面控制系统1101,适于监测到高轨卫星1102停止执行用于控制所述高轨卫星运行的操作后,根据预设防撞策略,控制高轨卫星1102的运行;其中,防撞策略对应处理所述运行状况不符合预设。
154.参见图12,图12是本发明实施例十中地面控制系统1101和高轨卫星1102的结构示意图,其中,地面控制系统1101可包括:监测单元1201、第一指令发送单元1202、操作控制单元1203;高轨卫星1102可包括:待监测单元1204、第一指令接收单元1205、控制执行单元
1206;操作控制单元1203可包括:策略设置模块1207、第二指令发送模块1208;控制执行单元1206可包括:第二指令接收模块1209、控制模块1210,推进系统1211;
155.监测单元1201,适于监测待监测单元1204的运行状况,在监测到其运行状况不符合预设时,指示第一指令发送单元1202发送操作禁止指令;
156.监测单元1201具体可用于监测上述如跟瞄系统故障、高轨卫星姿态等。示例性的,监测单元可以是地面控制系统中负责监测相关信息数据的终端。
157.待监测单元1204,适于接收监测单元1201的监测;示例性的,待监测单元1204如跟瞄系统、高轨卫星姿态等。
158.第一指令发送单元1202,适于根据监测单元1201的指示,向高轨卫星1102发送操作禁止指令;
159.第一指令接收单元1205,适于接收第一指令发送单元1202发送的操作禁止指令,将所述操作禁止指令指示给控制模块1210;
160.监测单元1201,适于监测到所述高轨卫星停止执行用于控制所述高轨卫星运行的操作后,指示操作控制单元1203工作;
161.操作控制单元1203,适于根据监测单元1201的指示,根据用于处理所述运行状况不符合预设的防撞策略,控制高轨卫星1102的运行。
162.具体地,操作控制单元1203中的策略设置模块1207,适于预设用于处理运行状况不符合预设的防撞策略,根据监测单元1201的指示,将防撞策略提供给第二指令发送模块1208;
163.第二指令发送模块1208,适于根据策略设置模块1207设置的防撞策略,发送用于指示高轨卫星1102按所述防撞策略执行防撞操作的防撞操作指令。
164.高轨卫星1102中的第二指令接收模块1209,适于接收第二指令发送模块1208发送的防撞操作指令,指示控制模块1210工作;
165.控制模块1210,适于根据第一指令接收单元1205的指示或第二指令接收模块1209的指示,控制推进系统1211执行喷气操作;
166.具体地,控制模块1210可控制推进系统1211执行相应的喷气操作,或者禁用喷气操作,如关闭推进系统1211。
167.推进系统1211,适于根据控制模块1210的控制,控制执行喷气操作。
168.参见题13,图13是本发明实施例十一中高轨卫星1102的结构示意图,图13中,高轨卫星1102还包括:自主防撞策略设置单元1301、自主监测单元1302;
169.自主防撞策略设置单元1301,适于在高轨卫星上预设用于指示该高轨卫星执行防撞操作的自主防撞策略,将自主防撞策略提供给自主监测单元1302和控制模块1210;自主防撞策略包括:高轨卫星监测所述高轨卫星与目标卫星间的位置信息,预测预设时间内两星之间的距离,若小于预设阈值,则改变自身运动轨迹;
170.自主监测单元1302,适于根据自主防撞策略设置单元1301提供的自主防撞策略,监测高轨卫星与目标卫星间的位置信息,预测预设时间内两星之间的距离,在监测到两星之间的距离小于预设阈值,指示控制模块1210工作;
171.控制模块1210,进一步适于根据自主监测单元1302的指示,控制推进系统1211的喷气操作;
172.推进系统1211,适于根据控制模块1210的控制,控制执行喷气操作。
173.参见图14,图14是本发明实施例十二中高轨卫星防撞系统1100的结构示意图。图14中,地面控制系统1101进一步包括:计算单元1401;
174.监测单元1201,进一步适于监测高轨卫星与目标卫星间的距离,基于策略设置模块1207的设置,在监测到所述距离小于预设安全距离阈值,由第一指令发送单元1202向该高轨卫星发送操作禁止指令;
175.高轨卫星1102的第一指令接收单元1205接收操作禁止指令后,由控制模块1210停止执行用于控制自身运行的操作;
176.计算单元1401,适于根据策略设置模块1207设置的上述第四防撞策略,依据计算y和z的值,将计算结果指示给高轨卫星的第二指令发送模块1208,由第二指令发送模块1208根据第四防撞策略,发送相应的防撞操作指令;第二指令接收模块1209收到防撞操作指令后,指示控制模块1210,控制推进系统1211执行相应的喷气操作。
177.综上所述,本发明具体实现中,基于星地联合,在地面控制系统监测到高轨卫星的运行状况不符合预设的情况下,如高轨卫星自身故障等,由地面控制系统暂停高轨卫星对自身运行的控制,并基于具体情况,由地面控制系统接管对高轨卫星运行的控制,可实现异常情况下对高轨卫星运行的控制,从而有效降低卫星间相撞的可能性。
178.另外,本发明中,基于在高轨卫星本身上设置防撞策略,提高高轨卫星自身防撞抵御能力,有效降低卫星间相撞的可能性。
179.本领域技术人员可以理解,实现上述实施例方法的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可读存储介质中。其中,所述计算机可读存储介质为磁盘、光盘、只读存储记忆体或随机存储记忆体等。
180.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1