一种用于直升机机炮后坐力的补偿控制分析方法
1.本发明涉及直升机的飞行控制技术领域,尤其涉及一种用于直升机机炮后坐力的补偿控制分析方法。
背景技术:
2.自上世纪90年代后,以信息技术为代表的相关技术领域取得重大突破,各国军队武装力量逐渐走上了信息化的道路。直升机作为一股具有强大火力,活动于低空和超低空的空中力量,它的存在能够有效填补固定翼飞机作战与地面、海上作战平台之间的空隙,完善了立体化作战的同时,开辟了战场的超低空通道。
3.随着军民融合的深入发展,一些军用武器技术,诸如直升机机炮上的技术也可以应用在民用领域:比如用于消防的无人机或者有人直升机,可以通过民用化的机炮设备发射灭火弹;再比如:在机场、农田驱鸟的场景中,也可以采用旋翼无人机+机炮设备的方式,发射捕捉网。
4.但由于直升机射击时一般采用悬停射击,垂尾和平尾对不能对直升机起到增稳的作用,因此机炮发射时产生的后坐力更易对其稳定性产生影响,导致直升机武器线发生变化,严重时甚至影响载机安全。这个问题不仅限于军用领域,在民用的有人/无人的旋翼飞行器上,也存在类似的问题,并且由于成本控制、操作难易度等因素,这些问题在民用的有人/无人的旋翼飞行器上也更难解决。
技术实现要素:
5.本发明的实施例提供一种用于直升机机炮后坐力的补偿控制分析方法,能够提升机炮发射时直升机姿态的稳定。
6.为达到上述目的,本发明的实施例采用如下技术方案:
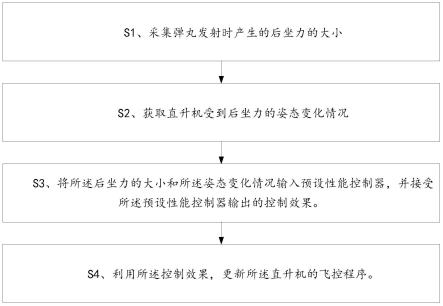
7.s1、采集弹丸发射时产生的后坐力的大小;
8.s2、获取直升机受到后坐力的姿态变化情况;
9.s3、将所述后坐力的大小和所述姿态变化情况输入预设性能控制器,并接受所述预设性能控制器输出的控制效果;
10.s4、利用所述控制效果,更新所述直升机的飞控程序的参数。
11.本发明实施例提供的用于直升机机炮后坐力的补偿控制分析方法,
12.本发明公开了一种基于预设性能的直升机机炮后坐力补偿控制,针对直升机机炮发射时产生的后坐力导致直升机姿态变化的问题,设计了一种新的后坐力补偿控制器,实现对直升机机炮发射时直升机姿态的控制。首先通过对直升机机炮发射时产生的后坐力进行计算,结合机炮与直升机的夹角,估算出机炮后坐力力矩的大小以及对直升机姿态产生的影响。使用预设性能控制方法,对直升机姿态进行补偿控制,从而提升机炮发射时直升机姿态的稳定。
附图说明
13.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
14.图1为本发明实施例提供的后坐力补偿控制方法的逻辑示意图;
15.图2为本发明实施例提供的内弹道时期变化曲线示意图;
16.图3为本发明实施例提供的后效期p
g-t曲线示意图;
17.图4为本发明实施例提供的全过程膛内p
g-t曲线示意图;
18.图5为本发明实施例提供的发射全程f
d-t曲线示意图;
19.图6为本发明实施例提供的发射全程f
g-t曲线示意图;
20.图7为本发明实施例提供的直升机机炮方向示意图;
21.图8为本发明实施例提供的在b=30
°
,c=30
°
时机炮后坐力对直升机姿态的影响的示意图;
22.图9为本发明实施例提供的机炮后坐力补偿控制的仿真实验效果的示意图;
23.图10为本发明实施例提供的方法流程示意图;
24.图11为本发明实施例提供的系统架构示意图。
具体实施方式
25.为使本领域技术人员更好地理解本发明的技术方案,下面结合附图和具体实施方式对本发明作进一步详细描述。下文中将详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
26.本发明实施例提供一种用于直升机机炮后坐力的补偿控制分析方法,如图10所示的,包括:
27.s1、采集弹丸发射时产生的后坐力的大小。
28.s2、获取直升机受到后坐力的姿态变化情况。其中,可以建立直升机动力学模型,建立直升机机炮发射后坐力模型,简化直升机后坐力模型,分析直升机受到后坐力的姿态
变化。
29.s3、将所述后坐力的大小和所述姿态变化情况输入预设性能控制器,并接受所述预设性能控制器输出的控制效果。其中,依据预设性能控制,结合backstepping方法对后坐力补偿控制器进行设计。对所设计的控制器进行仿真分析,验证其控制效果。
30.s4、利用所述控制效果,更新所述直升机的飞控程序的参数。
31.在实际应用中,传统直升机在装载武器系统进行发射时,会由于发射后坐力,从而导致武器线偏离,后坐力的累加甚至可能会威胁载机的稳定性。本实施例设计的预设性能控制器应用在后坐力补偿控制系统,后坐力补偿控制系统是直升机综合火力/飞行控制系统下的子模块,通过在武器发射时对飞控系统进行更新,保证直升机发射武器时的姿态稳定,从而保证武器线稳定。例如图11所示的,是一种目前业内很常见的综合火/飞控制系统,其中的后坐力补偿控制系统加载了本实施例中设计的预设性能控制器。具体的,直升机都处于悬停发射状态,在火控系统锁定目标后,更新直升机的飞控程序中有关发射的参数,从而实现在武器发射前的后坐力补偿,因此,对飞控程序中有关发射的参数进行后坐力补偿的时机,理论上只要是在发射前都可以。本实施例主要设计的,则是如何准确得获取控制效果,以便于能够进行后续的“补偿后的参数写入飞控程序中”的操作。在这其中,将补偿后的参数写入飞控程序中的方式和流程,属于本领域的常用手段,本领域技术人员在获得了与后坐力补偿相关的参数和控制效果的仿真结果后,基于通常的知识和理解即可完成“补偿后的参数写入飞控程序中”的操作,可以理解为现有的技术手段,进行因此“将补偿后的参数写入飞控程序中的方式和流程”本实施例中不再赘述。
32.本发明目的是提出一种直升机机炮后坐力补偿控制分析方法,针对直升机机炮发射产生后坐力的情况,首先对直升机机炮后坐力及力矩大小进行估算,其次分析对机炮后坐力的产生对直升机姿态的影响,接着利用预设性能控制理论,对控制器进行设计,最后仿真验证控制方法的可行性。
33.本实施例中,在s1中,弹丸发射时产生的后坐力的大小的方式包括:获取弹丸发射过程中的膛内压力,根据所述膛内压力,确定弹丸发射时的膛底压力,所述弹丸发射过程划分为:静力燃烧时期、内弹道期和后效期。之后根据弹丸发射时的膛底压力,确定弹丸发射时产生的后坐力的大小。
34.具体来说,静力燃烧时期是指从击发底火开始,直到弹头完全嵌入枪管膛线之前的这一段时间。这段时期作用时间相较于别的时期很短,可以近似认为这段时期内,膛内压强呈指数规律进行变化,使用式(2.1)的指数函数进行表示:
35.静力燃烧时期使用式(2.1)的指数函数进行表示:
36.获取静力燃烧时期的膛内压力
37.其中,pa为大气压强,ts为从静力燃烧时期开始算起的时间,as为待定系数,若静力燃烧结束时间为t
s1
,则膛压为p0为挤进气压,e为自然对数的底。
38.对于内弹道时期的问题,在使用数学解析法解决内弹道模型问题之前,需要对弹药燃烧现象进行适当的简化,此处,给出经典内弹道的基本假设:(1)以挤进气压p0作为内弹道时期开始的标志。(2)膛内火药同时开始且全面燃烧,火药遵循燃烧速度定律。(3)气体压力遵循拉格朗日假设。(4)燃气遵循诺贝尔-阿贝尔方程。(5)燃烧过程中,忽略燃气膨胀
会导致燃气组成分发生变化。(6)燃气膨胀会导致温度下降,但火药力fg、余容ag、比热比kh等物理量保持不变。(7)火药燃烧时,物体表面产生热交换从而导致热损失,采用减小火药力fg或提高比热比kh进行修正补偿。
39.内弹道基本方程组具体分析如下:
40.火药相对燃烧质量:
41.ψg=χgz(1+λgz+μgz2)
ꢀꢀꢀ
(2.2)其中:ψg为火药已燃百分数。χg,λg,μg为火药形状特征量。z为火药已燃相对厚度。
42.火药燃烧速度方程:
[0043][0044]
其中:u1为火药燃烧速度系数。pg为膛内平均气压。ng为燃烧速度指数。e1为火药弧厚。
[0045]
弹丸运动的基本方程:
[0046][0047]
其中:lg为弹头行程。vg为弹丸速度。sg为枪膛内横断面面积。pb为弹丸底部气压,可近似为膛内平均气压pg。为次要功计算系数。mg为弹丸质量。
[0048]
内弹道基本方程:
[0049][0050]
其中:l
ψ
为药室缩径长。ωg为装填火药质量。θg=k
h-1为火药热力系数。l0为药室长度。为装填密度,w0为药室容积。αg为火药气体余容。ρg表示火药密度。
[0051]
可以得出,获取内弹道期的膛内压力的方式为:其中,sg为枪膛内横断面面积,pg为膛内平均气压,l
ψ
为药室缩径长,lg为弹头行程,fg为火药力,ωg为装填火药质量,ψg为火药已燃百分数,θg=k
h-1为火药热力系数,kh为比热比,为次要功计算系数,mg为弹丸质量,vg为弹丸速度,l0为药室长度,为装填密度,w0为药室容积,αg为火药气体余容,ρg为火药密度。例如:选取的30mm机炮选用的参数如表3.1所示(部分参数为估算值)。
[0052]
表3. 130mm机炮参数表
[0053][0054][0055]
依据表中30mm机炮参数,结合式(2.2)到式(2.5)的内弹道方程组,利用matlab仿真工具对内弹道时期膛压随时间变化进行动态仿真。图2(a)表示内弹道时期膛内平均气压pg随时间的变化曲线,(b)表示内弹道时期膛内平均气压pg和弹头行程lg之间的关系,(c)表示内弹道时期,弹头速度vg和时间之间的关系,(d)表示弹头速度vg和路程lg之间的关系。
[0056]
对于后效期的问题,弹头经过枪管飞出枪体后,火药气体从枪口泄出,膛内气压快速降低。在气压下降的过程中,从枪口泄出的气压仍然会推动弹头向前运动,同时也仍然会对膛底产生一定的压力,这段时间称为后效期。由于后效期时,气体变化情况比较复杂,因此做出如下假设:(1)火药气体流动是一维的。(2)火药气体流动是等熵的。(3)忽略火药气体质量力。(4)后效期期间内,膛内气体密度均匀。(5)膛内气体流速等于当地的声音速度。(6)后效期内,膛底不产生后坐运动。对于后效期计算,一般采用斯鲁霍斯基理论或者布拉温公式,其中斯鲁霍斯基理论由于对膛内火药气体的总动量进行假设,处理过程相对粗糙,因此公式物理含义比较模糊,不利于工程实现。相比之下,布拉温经验公式更适合于对后效期的计算研究。
[0057]
对于后效期计算,采用布拉温经验公式对后效期参数进行计算:
[0058][0059]
其中:pk为后效期开始时膛内平均压强。ta为示从后效期开始算起的时间。ag为常
系数。
[0060]
常系数ag的计算公式为:
[0061][0062]
其中:v0为弹头出膛速度。βg为火药燃气后效期的作用系数。
[0063]
对于后效作用系数βg,可以使用半经验公式进行计算:
[0064][0065]
其中:cg为无因次系数,一般取1.3。为枪膛的换算长度,lg为弹头在枪膛内行程的长度。
[0066]
根据式(2.6),可以得到后效期总作用时间,公式如下进行计算:
[0067][0068]
由于静力燃烧时期相较于内弹道时期和后效期极短,因此在此处忽略不计。则后效期结束的总时间:
[0069]
t=ts+ti+ta≈ti+taꢀꢀꢀ
(2.10)
[0070]
结合式(2.7)到式(2.10)对后效期总作用时间进行计算。
[0071]
得到:βg=1.24,ag=0.48ms-1
。当pg=pa时,即膛压下降到与大气压相等时,则认为后效期作用结束,因此可以通过式(2.11)对后效期总作用时间进行计算:
[0072][0073]
因此,获取后效期的膛内压力为:其中,pk为后效期开始时膛内平均压强。ta为示从后效期开始算起的时间,ag为常系数。可以进一步利用matlab工具对布拉温公式描述的后效期气压与时间的关系进行仿真,可以得到如图3所示的后效期的p
g-t曲线。
[0074]
结合式(2.10)与内弹道时期仿真可以得到整个后效期结束的总时间为:
[0075]
t=ti+ta=2.6+13.57=16.17ms
ꢀꢀꢀ
(2.12)
[0076]
结合静力燃烧时期、内弹道时期、后效期三个时期,可以得到整个发射阶段的p
g-t曲线,如图4所示的全过程膛内p
g-t曲线。
[0077]
进一步的,本实施例中确定弹丸发射时的膛底压力的方式,包括:
[0078]
建立膛底气压pd和膛压pg的比例关系其中,为次要功计算系数。获取膛底所受压力fd=s1·
pd,其中,s1为膛底有效面积。
[0079]
具体的,膛底压力计算的思路为:结合静力燃烧时期、内弹道时期、后效期三个时期,可以得到整个发射阶段的膛内压力变化情况。在发射全过程中,膛底气压pd和膛压pg存在一定的比例关系:
[0080][0081]
其中,为次要功计算系数。,此处取值为1.05。利用30mm机炮数据,采用式(2.13)对膛底气压pd进行计算,可以得到pd≈1.08pg[0082]
膛底所受压力fd可以由压力公式进行计算:
[0083]
fd=s1·
pdꢀꢀꢀ
(2.14)
[0084]
其中,s1为膛底有效面积。由此,可以得到整个发射过程中,膛底作用力fd随时间的变化。并进一步可以得到整个发射过程中,膛底作用力fd随时间变化的曲线,如图5所示。
[0085]
本实施例中,所述根据弹丸发射时的膛底压力,确定弹丸发射时产生的后坐力的大小,包括:根据fg=f
d-f
zm-f
dx
,确定弹丸发射时产生的后坐力的大小,其中,f
zm
为药室锥面火药燃气作用力,f
dx
为弹丸作用在膛线上的力。具体的,后坐力fg可以根据式(2.13)进行计算:
[0086]fg
=f
d-f
zm-f
dx
ꢀꢀꢀ
(2.15)
[0087]
其中,f
zm
为药室锥面火药燃气作用力。f
dx
为弹丸作用在膛线上的力,这种作用力的作用时期在内弹道时期。由此可以得到,机炮发射时产生后坐力的大小。由图6仿真可知,机炮发射时由于火药燃烧的燃气气体会产生极大的后坐力能量,这种冲击本身就会带来很多负面影响,会影响机械系统的稳定性。
[0088]
本实施例中,需要先建立直升机后坐力模型并输入所述预设性能控制器,之后利用所述直升机后坐力模型,获取直升机受到机炮后坐力时的姿态变化,并作为所述预设性能控制器输出的控制效果。具体过程为:(1)建立直升机姿态模型方程。(2)建立直升机机炮后坐力模型。(3)对直升机机炮后坐力模型进行简化。(4)分析直升机受到后坐力产生的姿态变化。其中,所述直升机后坐力模型为其中,x1=[φ,θ,ψ]
t
,x2=[p,q,r]
t
,g1(x1),f2(x2),g2为转换矩阵,u为输入量,dg=[m
gx
/i
x
,m
gy
/iy,m
gz
/iz]
t
为机炮后坐力扰动量,φ表示滚转角、θ表示俯仰角、ψ表示偏航角、p表示滚转角速度、q表示俯仰角速度、r表示偏航角速度、m
gx m
gy m
gz
分别表示机炮对x y z轴的扰动力矩、i
x i
y iz表示绕x y z轴的惯性矩;
[0089]
具体的,直升机动力学模型可以表示为:
[0090][0091]
其中,φ,θ,ψ分别为俯仰、滚转、偏航角。p,q,r分别为俯仰、滚转、偏航角速度。i
x
,iy,iz分别为绕x,y,z轴的惯性矩。m
x
,my,mz分别为在滚转、俯仰、偏航三个通道中的力矩。例如图7表示的直升机机炮的相对运动方向与角度,其中,a表示直升机机炮相对于载机的纵向运动角度,以机炮偏向于载机的水平面下方为正。b表示直升机机炮相对于载机的水平运
动角度,以机炮在直升机机体右侧为正。
[0092]
具体的,建立直升机机炮后坐力模型
[0093]
考虑到机炮模型在三个通道均产生力矩影响,因此对直升机系统中滚转、俯仰、偏航三个通道可以写成:
[0094][0095]
其中,m
gx
,m
gy
,m
gz
分别为在滚转、俯仰、偏航三个通道中机炮后坐力的力矩,其大小可以表示为:
[0096][0097]
其中,fg为机炮后坐力。a表示直升机机炮相对于载机的纵向运动角度,以机炮偏向于载机的水平面下方为正。。b表示直升机机炮相对于载机的水平运动角度,以机炮在直升机机体右侧为正。l
gx
为机炮水平力臂,其大小为载机重心到机炮铰链所在yoz平面的长度。l
gz
为机炮纵向力臂,其大小为载机重心到机炮铰链所在xoy平面的长度。
[0098]
进一步的,简化直升机后坐力模型,对于机炮后坐力模型,式(3.1)可以写为::
[0099][0100]
其中,x1=[φ,θ,ψ]
t
,x2=[p,q,r]
t
,g1(x1),f2(x2),g2为转换矩阵,u为输入量,dg=[m
gx
/i
x
,m
gy
/iy,m
gz
/iz]
t
为机炮后坐力扰动量。通过式(3.4),可以将机炮后坐力模型与直升机模型结合在一起。
[0101]
之后可以使用matlab工具对直升机机炮后坐力模型进行仿真分析,当a=30
°
,b=30
°
时,直升机三个通道的角度变化如图8所示的a=30
°
,b=30
°
时机炮后坐力对直升机姿态的影响。由图8可得,当机炮与直升机存在一定发射角度时,直升机姿态将会受到后坐力影响而产生变化。
[0102]
进一步的,本实施例中还包括:建立映射函数模型和预设性能函数模型,并确定误差转化的方式。利用所述映射函数模型、所述预设性能函数模型和所述误差转化的方式,建立所述预设性能控制器。大致的过程可以理解为:(1)选择映射函数。(2)选择预设性能函数。(3)进行误差转化。(4)设计预设性能控制器。
[0103]
其中,所述映射函数模型为:其中,ε为转换误差,s(ε)为误差转换函数,δ∈(0,1]表示系统响应的超调量,e表示自然对数的底。所述预设性能函数模型为:其中,a
ρ
,b
ρ
为参数常量,ρ
∞
为设置的稳态误差范围,t为响应时间。所述误差转化的方式包括:表示转换误差的导数,表示姿态角
速度误差的导数,f1(ε)和表示系统矩阵,g1(ε)和g2表示转换矩阵,e2表示姿态角速度误差,u表示输入。误差表示为其中,e1表示姿态角误差,x
1c
表示期望的姿态角,e2表示姿态角速度误差,x
2c
表示期望的姿态角速度,e
φ
,e
θ
,分别表示滚转、俯仰、偏航角误差,e
p
,eq,er表示滚转、俯仰、偏航角速度误差。
[0104]
具体来说,可以使用式(4.1)作为映射函数:
[0105][0106]
其中,ε为转换误差。s(ε)为误差转换函数,它是一个定义域为实数集r,值域为[-1,1]的连续单调递增函数
[0107]
设计的选择预设性能函数为:
[0108][0109]
其中,a
ρ
,b
ρ
为参数常量,ρ
∞
为设置的稳态误差范围。
[0110]
误差转化的方式包括:
[0111]
e(t)=ρ(t)s(ε)
ꢀꢀꢀ
(4.3)
[0112]
则误差转换函数s(ε)可以写为:
[0113][0114]
由于s(ε)连续且单调递增,可以将误差转化函数进行逆变换得到:
[0115][0116]
求导可得:
[0117][0118]
进行误差转化的过程为:
[0119]
针对直升机系统,定义误差为:
[0120][0121]
其中,e1表示姿态角误差,x
1c
表示期望的姿态角,e2表示姿态角速度误差,x
2c
表示期望的姿态角速度。
[0122]
根据式(3.4),建立原系统的误差模型:
[0123][0124]
令:
[0125]
则式(4.8)可以转化成如下形式:
[0126][0127]
分别对e1中每一个元素会对应不同的误差转换,可以得到:
[0128][0129]
其中,f1(ε),e2,u∈r3×1,g1(ε),g2∈r3×3。
[0130]
采用backstepping方法对预设性能控制器进行设计,并设计李雅普诺夫函数进行稳定性分析。从而建立预设性能控制器。例如,采用backstepping方法对控制器进行设计的过程包括:
[0131]
step1:设虚拟状态量为:其中α1为虚拟控制律,
[0132]
则式(4.10)中第一个子系统进行转化为:
[0133][0134]
设计虚拟控制律α1为:
[0135][0136]
其中,k1为设计参数,其大小为正。
[0137]
则:
[0138][0139]
选取lyapunov函数为:
[0140][0141]
对其求导得:
[0142][0143]
step2:对式(4.10)中第二个子系统进行转化得:
[0144][0145]
其中,
[0146]
设计实际控制律为:
[0147][0148]
其中,k2为设计参数,其大小为正。
[0149]
则式(4.16)可以写为:
[0150]
[0151]
选取lyapunov函数为:
[0152][0153]
对其求导得:
[0154][0155]
由于因此与相等,所以式(4.20)可以写为:
[0156][0157]
由于根据李雅普诺夫第二法,可以判断采用式(4.17)的控制律,能够保证系统稳定,从而可以满足原系统的预设稳态性能和瞬态性能的要求。举例来说,如图9所示的,对a=30
°
,b=30
°
时,机炮产生的后坐力进行仿真验证。采用式(4.17)的控制律对直升机系统进行控制,同样采的预设性能函数为ρ=0.5e-40t
+0.01。从图9中可以看出控制直升机姿态在0.1s内将误差调整到可控范围内,即可保证载机发射稳定。
[0158]
本发明公开了一种基于预设性能的直升机机炮后坐力补偿控制,针对直升机机炮发射时产生的后坐力导致直升机姿态变化的问题,设计了一种新的后坐力补偿控制器,实现对直升机机炮发射时直升机姿态的控制。首先通过对直升机机炮发射时产生的后坐力进行计算,结合机炮与直升机的夹角,估算出机炮后坐力力矩的大小以及对直升机姿态产生的影响。使用预设性能控制方法,对直升机姿态进行补偿控制,从而保持机炮发射时直升机姿态的稳定。
[0159]
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于设备实施例而言,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1