一种多无人机自组织协同系统及方法
1.本发明属于机器人导航与控制技术领域,具体涉及一种多无人机自组织协同系统及方法。
背景技术:
2.由于目前无人机的智能化水平有限,单一的无人机难以适应复杂多变的任务环境,相比于单个无人机,多架无人机经过协同后在任务执行上具有诸多优势。例如:多个无人机具有更好的系统兼容性和容错性,更好的任务载荷扩展性,分布式感知与控制。这些优势能够将单个无人机的力量化零为整,提升多无人机整体的任务执行能力,从而完成单机难以完成的任务。同时,通过合理的安排与协同,能够将高昂的任务载荷成本分散到不同的无人机上,从而降低整体的硬件成本,因此合理地使用多无人机,不仅能够提升系统整体的运行效率,也能降低系统的成本并带来更高的经济效益。然而,目前在多无人机的自主协同方法,仍存在一定地局限性,如何实现更加自主,更加智能的多无人机自主协同是当前亟需解决的技术难点,突破这一难点,多无人机协同任务将得到更加广泛的应用,从而切实地为社会发展做出贡献。
技术实现要素:
3.有鉴于此,本发明提供了一种多无人机自组织协同系统及方法,能够实现多无人机的自主通信与分布式自主控制,提供大规模无人机自组织协同的系统方案。
4.实现本发明的技术方案如下:
5.一种多无人机自组织协同系统,包括3个及以上的多个无人机、通信基站、定位基站;
6.每个无人机均包括无人机自动驾驶仪、遥控器、差分卫星导航设备、通信模块和机载计算机;
7.通过所述通信基站建立一个现场局域网,所述无人机在通信基站的信号覆盖范围内能够实现多机间的无线通信;
8.所述定位基站向多个无人机广播卫星差分修正数据,差分卫星导航设备将接收定位基站的广播数据进而解算出高精度卫星定位信息;
9.所述差分卫星导航设备用于接收定位基站广播的卫星差分修正数据,从而获取无人机的高精度定位定向信息;
10.所述无人机自动驾驶仪用于接收所述差分卫星导航设备的高精度定位定向信息、惯性导航传感器数据的采集、完成无人机的导航信息解算、飞行控制、接收机载计算机的控制指令以及操纵者通过遥控器发送的控制指令完成相应的飞行动作。
11.进一步地,所述机载计算机用于:
12.1)从无人机自动驾驶仪读取操纵员的控制指令、无人机自身的高精度定位信息;
13.2)从通信模块接收通信范围内其他无人机发送的信息;
14.3)向通信模块发送自身的高精度定位数据和速度数据,并由通信模块广播这些数据;
15.4)运行多无人机自组织协同方法,并计算出无人机的控制指令,并将指令发送给无人机自动驾驶仪。
16.进一步地,所述无人机依次编号为1,2,3,
……
,编号为i的无人机包括:无人机自动驾驶仪i,遥控器i,差分卫星导航设备i,通信模块i,机载计算机i;编号为j的无人机包括:无人机自动驾驶仪j,遥控器j,差分卫星导航设备j,通信模块j,机载计算机j;所述无人机自动驾驶仪分别与遥控器、机载计算机、差分卫星导航设备连接,所述机载计算机分别与无人机自动驾驶仪、通信模块连接。
17.一种多无人机自组织协同方法,用于多无人机的分布式自主控制,通过每架无人机同时运行相同的自组织协同方法最终实现多无人机的状态趋同。
18.进一步地,所述方法具体包括以下步骤:
19.步骤一:记录当前无人机i通信范围内收到的所有其他无人机广播的无人机数据,所述的无人机数据包括:无人机编号j,卫星定位数据pj,速度数据vj,依据收集到的数据,判定其中状态距离与无人机i最为接近的前n的无人机为邻居,所述状态距离为两两无人机之间的相对距离或相对速度大小(或为两两无人机之间的相对距离与相对速度大小的线性组合,或为两两无人机之间的相对距离小于某一定值时的相对速度大小),所述邻居构成的集合为ni所述邻居的无人机数据将被保留,而且收集到的其他无人机数据将被丢弃;
20.步骤二:根据邻居的无人机数据,计算用于无人机间距保持的控制指令分量v
i,rep
,计算方法如下:
[0021][0022]
其中,v
ij,rep
为用于无人机i与无人机j之间间距保持的控制指令分量,k为指令增益,f
adp
(x)为自适应增益函数,包括但不限于形如:f
adp
(x)=x,f
adp
(x)=1/x,f
adp
(x)=x+a/x的函数;
[0023]
步骤三:机载计算机获取其他无人机机载计算机中控制模块产生的控制指令分量v
i,d
,这些控制模块包括但不限于用于实现障碍物规避以及目标跟踪等相关控制模块产生的控制指令分量;
[0024]
步骤四:将用于无人机间距保持的控制指令分量v
i,rep
与其他控制模块产生的控制指令分量v
i,d
,以及邻居中其他无人机的速度数据按照如下方式处理得到最终的无人机控制指令v
i,ali
:
[0025][0026]
其中,α为自组织因子,v
rand
为随机数生成器生成的速度矢量,σ为随机速度幅值。
[0027]
有益效果:
[0028]
(1)本发明提供了一种多无人机自组织协同方法,能够实现多个无人机的自主协同,不需要或者只需要少量的人工干预就能实现无人机的自主协同;
[0029]
(2)本发明提供了一种多无人机自组织协同系统,它提供了一种切实可行,且成本低廉的协同系统解决方案;
[0030]
(3)本发明提供的多无人机自组织协同方法计算代价相对较小,不需要大型的机载计算机,能够节省无人机的电力消耗,从而增加无人机的航时以及任务载荷。
附图说明
[0031]
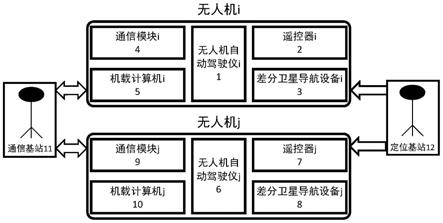
图1是本发明实施例一提供的一种多无人机自组织协同系统结构框图。
[0032]
图2是本发明实施例一提供的一种多无人机自组织协同方法流程图。
具体实施方式
[0033]
下面结合附图并举实施例,对本发明进行详细描述。
[0034]
实施实例一:
[0035]
本发明实施实例提供了一种多无人机自组织协同系统及方法,通过差分卫星定位系统、wifi无线通信技术实现多无人机的通信组网以及高精度定位,设计具备自主交互对象选择、个体间距保持、障碍物规避、目标跟踪、观点综合等多项功能的自组织协同控制方法,从而实现多无人机的自主通信与分布式自主控制,能够提供大规模无人机自组织协同的系统方案。
[0036]
如图1所示,所述多无人机自组织协同系统,包括3个及以上的多个无人机、通信基站、定位基站;
[0037]
所述无人机依次编号为1,2,3,
……
,其中每个无人机包括相同的设备,例如编号为i的无人机包括:无人机自动驾驶仪i,遥控器i,差分卫星导航设备i,通信模块i,机载计算机i;编号为j的无人机包括:无人机自动驾驶仪j,遥控器j,差分卫星导航设备j,通信模块j,机载计算机j;所述无人机自动驾驶仪分别与遥控器、机载计算机、差分卫星导航设备连接,所述机载计算机分别与无人机自动驾驶仪、通信模块连接。
[0038]
通过所述通信基站建立一个现场局域网,所述无人机在通信基站的信号覆盖范围内能够实现多机间的无线通信;
[0039]
所述定位基站向多个无人机广播卫星差分修正数据,差分卫星导航设备将接收定位基站的广播数据进而解算出高精度卫星定位信息;
[0040]
所述差分卫星导航设备用于接收定位基站广播的卫星差分修正数据,从而获取无人机的高精度定位定向信息;
[0041]
所述无人机自动驾驶仪用于接收所述差分卫星导航设备的高精度定位定向信息、惯性导航传感器数据的采集、完成无人机的导航信息解算、飞行控制、接收机载计算机的控制指令以及操纵者通过遥控器发送的控制指令完成相应的飞行动作。
[0042]
所述机载计算机用于:
[0043]
1)从无人机自动驾驶仪读取操纵员的控制指令、无人机自身的高精度定位信息;
[0044]
2)从通信模块接收通信范围内其他无人机发送的信息;
[0045]
3)向通信模块发送自身的高精度定位数据和速度数据,并由通信模块广播这些数据;
[0046]
4)运行多无人机自组织协同方法,并计算出无人机的控制指令,并将指令发送给
无人机自动驾驶仪。
[0047]
如图2所示,所述多无人机自组织协同方法,用于多无人机的分布式自主控制,通过每架无人机同时运行相同的自组织协同方法最终实现多无人机的状态趋同。具体包括以下步骤:
[0048]
步骤一:记录当前无人机i通信范围内收到的所有其他无人机广播的无人机数据,所述的无人机数据包括:无人机编号j,卫星定位数据pj,速度数据vj,依据收集到的数据,判定其中状态距离与无人机i最为接近的前n的无人机为邻居,所述状态距离为两两无人机之间的相对距离或相对速度大小,(或为两两无人机之间的相对距离与相对速度大小的线性组合,或为两两无人机之间的相对距离小于某一定值时的相对速度大小),所述邻居构成的集合为ni所述邻居的无人机数据将被保留,而且收集到的其他无人机数据将被丢弃;
[0049]
步骤二:根据邻居的无人机数据,计算用于无人机间距保持的控制指令分量v
i,rep
,计算方法如下:
[0050][0051]
其中,v
ij,rep
为用于无人机i与无人机j之间间距保持的控制指令分量,k为指令增益,f
adp
(x)为自适应增益函数,包括但不限于形如:f
adp
(x)=x,f
adp
(x)=1/x,f
adp
(x)=x+a/x的函数;
[0052]
步骤三:机载计算机获取其他无人机机载计算机中控制模块产生的控制指令分量v
i,d
,这些控制模块包括但不限于用于实现障碍物规避以及目标跟踪等相关控制模块产生的控制指令分量;
[0053]
步骤四:将用于无人机间距保持的控制指令分量v
i,rep
与其他控制模块产生的控制指令分量v
i,d
,以及邻居中其他无人机的速度数据按照如下方式处理得到最终的无人机控制指令v
i,ali
:
[0054][0055]
其中,α为自组织因子,v
rand
为随机数生成器生成的速度矢量,σ为随机速度幅值。
[0056]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1