一种推进器部分失效下的无人船控制失效率和扰动估计方法及系统
1.本发明涉及无人船扰动估计和运动控制技术领域,具体而言,尤其涉及一种推进器部分失效下的无人船控制失效率和扰动估计方法及系统。
背景技术:
2.随着人类社会的发展,海洋经济总量也在不断提高,世界各国在海洋空间的生产活动也十分活跃,因此,海洋的合理开发与保护也在成为保证海洋经济可持续发展的重要前提。无人船凭借其操作安全、高效节能、成本低等优点,逐渐成为海洋开发和保护的重要装备,在民用以及军事方面发挥了巨大的作用,具有广阔的发展。无人船运动控制是无人船研究领域的关键问题,提高无人船的控制精度,确保无人船正常安全的行驶,国内外学者针对无人船扰动的估计进行了很多相关研究,提出了如基于向量机、神经网络、扰动观测器、参数自适应等扰动估计系统。
3.然而无人船在实际行驶过程中,面对复杂未知的海域情况,容易出现各种不确定的故障。例如,无人船推进器会因故障而引发部分失效的问题,此时无人船实际控制推力不能完全达到期望值,即系统控制增益发生改变。这种情况下,如果不能及时对无人船失效控制增益与失效率进行有效估计和补偿控制,可能导致无人船控制性能下降,甚至系统失稳。针对此类故障,现有扰动估计方法存在以下不足:
4.(1)在现有的方法中,一般不考虑无人船因故障导致推进器部分失效,从而没有对无人船的失效率进行估计。忽略无人船失效率的影响,此时将会存在对扰动的估计精度不足的问题,进而现有的方法无法对无人船进行精准控制。
5.(2)现有的估计方法没有对失效控制增益进行估计,无法解决因无人船发生故障,使得无人船推进器产生的实际推进力小于期望推进力,产生的实际推进力等效控制器增益与原控制器内设定好的控制器增益不等的问题。
6.(3)在现有的无人船的扰动估计方法中,存在暂时性能差、依赖模型、依赖持续激励等缺点,此时无法对变化的无人船系统模型进行准确的外部扰动估计。而且现有方法的实施有时需要进行繁琐复杂的运算,如基于参数自适应状态估计方法,此时的估计系统比较复杂。
技术实现要素:
7.根据上述提出的技术问题,提供一种推进器部分失效下的无人船控制失效率和扰动估计方法及系统。本发明将数据驱动自学习方法与自抗扰控制相结合。提出一种响应速度快、效益高、适用性强的推进器部分失效下的无人船控制失效率和扰动估计方法。本发明不仅可以实现对失效率进行估计,而且还能实现对复杂的未知时变系统总扰动进行估计。
8.本发明采用的技术手段如下:
9.一种推进器部分失效下的无人船控制失效率和扰动估计方法,包括如下步骤:
10.s1、构建推进器失效的无人船模型,并给定无人船模型一个系统输入;
11.s2、建立状态观测器模块,进行状态观测得到当前时刻速度的观测值;
12.s3、建立扰动估计器模块,将得到的当前时刻速度的观测值导入到扰动估计器模块中,得到系统总扰动与环境扰动的估计值;
13.s4、建立无人船控制增益估计模块,将得到的当前时刻速度的观测值导入到无人船控制增益估计模块,得到失效控制增益;
14.s5、建立失效率估计模块,对无人船失效率进行估计。
15.进一步地,所述步骤s1的具体实现过程如下:
16.s11、构建推进器失效的无人船模型,表达式如下:
[0017][0018]
σ(k)=m-1
xuu(k)+m-1
x
u|u|
u(k)|u(k)|+m-1
ω(k)
[0019]
其中,u(k)、u(k+1)分别表示当前时刻无人船航速与下一时刻无人船航速,t为离散时间常数,τ(k)为系统的控制输入,m为船体重量,ω(k)为无人船所受环境扰动,σ(k)为未知时变动力学不确定,xu与x
u|u|
为水动力参数,为推进器失效下的失效控制增益,b0为额定控制增益,α∈[0,1)为无人船控制失效率;
[0020]
s12、定义无人船系统的总扰动,表达式如下:
[0021][0022]
其中,为失效控制增益估计。
[0023]
进一步地,所述步骤s2的具体实现过程如下:
[0024]
s21、建立状态观测器模块,表达式如下:
[0025][0026]
其中,k2为扩张观测器控制增益;
[0027]
s22、将状态观测器模块的输入端与扰动估计器输出的无人船系统总扰动估计失效控制增益估计模块输出的失效控制增益估计相连。
[0028]
进一步地,所述步骤s3的具体实现过程如下:
[0029]
s31、建立扰动估计器模块,表达式如下:
[0030][0031]
其中,为下一时刻无人船系统总扰动估计,γm为自适应增益;
[0032]
s32、将扰动估计器模块的输入端与系统的控制输入τ(k)、无人船当前时刻速度u(k)、下一时刻速度估计u(k+1)、失效控制增益估计相连。
[0033]
进一步地,所述步骤s4的具体实现过程如下:
[0034]
s41、建立无人船失效控制增益估计模块,表达式如下:#
[0035][0036][0037]
其中,γn、γm为无人船失效控制增益估计模块的自适应增益,对失效控制增益的值进行限制;
[0038]
s42、将无人船失效控制增益估计模块的输入端与无人船模块的输出的当前时刻速度u(k)、状态观测器模块输出的下一时刻速度估计相连,无人船控制失效控制增益估计模块的输出端与失效率估计模块相连。
[0039]
进一步地,所述步骤s5的具体实现过程如下:
[0040]
s51、建立失效率估计模块,表达式如下:
[0041][0042]
其中,为估计失效率;
[0043]
s52、将失效率估计模块的输入端与失效控制增益估计模块相连,通过失效率估计模块对无人船控制失效率进行估计。
[0044]
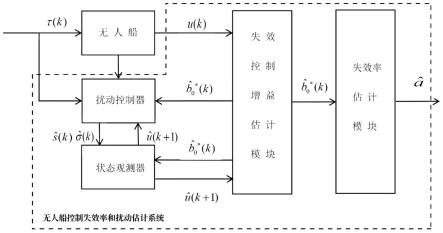
本发明还提供了一种基于上述推进器部分失效下的无人船控制失效率和扰动估计方法的系统,包括:无人船模型、扰动估计器模块、状态观测器模块、无人船失效控制增益估计模块与失效率估计模块,其中,连接关系如下:
[0045]
无人船模型的输入端与系统控制输入相连,无人船模型模块的输出端与当前时刻速度、当前时刻速度估计相连;
[0046]
扰动估计器模块输入端与系统控制输入、当前时刻速度、下一时刻速度估计、失效控制增益估计相连,扰动估计器模块的输出端与未知时变动力学不确定、无人船系统总扰动估计相连;
[0047]
状态观测器模块的输入端与无人船系统总扰动估计、未知时变动力学不确定、失效控制增益估计相连,状态观测器的输出端与下一时刻速度估计相连;
[0048]
失效控制增益估计模块的输入端与无人船当前时刻速度、无人船下一时刻速度估计相连,失效控制增益估计模块的输出端与失效控制增益估计相连;
[0049]
失效率估计模块的输入端与失效控制增益估计相连,失效率估计模块的输出端与控制失效率相连。
[0050]
较现有技术相比,本发明具有以下优点:
[0051]
1、在现有的扰动估计方法中,一般没有考虑对无人船失效率进行估计。本发明引入了对无人船失效率的估计,使得无人船在控制器部分失效时,仍然能对外部扰动进行准确估计,因此估计方法提高了无人船运动扰动估计能力。
[0052]
2、本发明在观测器中引入了对控制器增益的估计,解决了无人船因故障产生的推
进器部分失效下,控制增益发生变化的估计问题。为解决无人船推进器故障导致的实际推力与期望推力不匹配问题提供了技术储备。
[0053]
3、本发明引入扩张观测器模块,将数据驱动自学习方法与自抗扰设计进行结合。进一步解决了现有发明存在的依赖模型,依赖持续激励的缺点。建立扩张观测器时避免使用了形式复杂的控制方程,简化了状态观测器的结构,从而降低估计系统的复杂性。
[0054]
基于上述理由本发明可在无人船扰动估计和运动控制等领域广泛推广。
附图说明
[0055]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0056]
图1为本发明系统组成框图。
[0057]
图2为本发明提供的无人船速度示意图,图中u表示无人船的实际速度,表示无人船速度估计。
[0058]
图3为本发明提供的系统总扰动s的观测图像,图中s代表实际的系统总扰动,代表通过状态观测器模块得到的系统总扰动估计。
[0059]
图4为本发明提供的无人船推进器失效控制增益的图像,图中代表无人船推进器实际控制增益,代表无人船推进器控制增益估计。
[0060]
图5为本发明提供的失效率示意图,图中α为实际失效率,为估计失效率。
具体实施方式
[0061]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0062]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0063]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
[0064]
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当清楚,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员己知的技术、方
法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任向具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
[0065]
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制:方位词“内、外”是指相对于各部件本身的轮廓的内外。
[0066]
为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其位器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
[0067]
此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
[0068]
本发明提供了一种推进器部分失效下的无人船控制失效率和扰动估计方法,包括如下步骤:
[0069]
s1、构建推进器失效的无人船模型,并给定无人船模型一个系统输入;
[0070]
具体实施时,作为本发明优选的实施方式,所述步骤s1的具体实现过程如下:
[0071]
s11、构建推进器失效的无人船模型,表达式如下:
[0072][0073]
σ(k)=m-1
xuu(k)+m-1
x
u|u|
u(k)|u(k)|+m-1
ω(k)
[0074]
其中,u(k)、u(k+1)分别表示当前时刻无人船航速与下一时刻无人船航速,t为离散时间常数,τ(k)为系统的控制输入,m为船体重量,ω(k)为无人船所受环境扰动,σ(k)为未知时变动力学不确定,xu与x
u|u|
为水动力参数,为推进器失效下的失效控制增益,b0为额定控制增益,α∈[0,1)为无人船控制失效率;
[0075]
s12、定义无人船系统的总扰动,表达式如下:
[0076][0077]
其中,为失效控制增益估计。
[0078]
s2、建立状态观测器模块,进行状态观测得到当前时刻速度的观测值;
[0079]
具体实施时,作为本发明优选的实施方式,所述步骤s2的具体实现过程如下:
[0080]
s21、建立状态观测器模块,表达式如下:
[0081][0082]
其中,k2为扩张观测器控制增益;
[0083]
s22、将状态观测器模块的输入端与扰动估计器输出的无人船系统总扰动估计失效控制增益估计模块输出的失效控制增益估计相连。
[0084]
s3、建立扰动估计器模块,将得到的当前时刻速度的观测值导入到扰动估计器模块中,得到系统总扰动与环境扰动的估计值;
[0085]
具体实施时,作为本发明优选的实施方式,所述步骤s3的具体实现过程如下:
[0086]
s31、建立扰动估计器模块,表达式如下:
[0087][0088]
其中,为下一时刻无人船系统总扰动估计,γm为自适应增益;
[0089]
s32、将扰动估计器模块的输入端与系统的控制输入τ(k)、无人船当前时刻速度u(k)、下一时刻速度估计u(k+1)、失效控制增益估计相连。
[0090]
s4、建立无人船控制增益估计模块,将得到的当前时刻速度的观测值导入到无人船控制增益估计模块,得到失效控制增益;
[0091]
具体实施时,作为本发明优选的实施方式,所述步骤s4的具体实现过程如下:
[0092]
s41、建立无人船失效控制增益估计模块,表达式如下:#
[0093][0094][0095]
其中,γn、γm为无人船失效控制增益估计模块的自适应增益,对失效控制增益的值进行限制;
[0096]
s42、将无人船失效控制增益估计模块的输入端与无人船模块的输出的当前时刻速度u(k)、状态观测器模块输出的下一时刻速度估计相连,无人船控制失效控制增益估计模块的输出端与失效率估计模块相连。
[0097]
s5、建立失效率估计模块,对无人船失效率进行估计。
[0098]
具体实施时,作为本发明优选的实施方式,所述步骤s5的具体实现过程如下:
[0099]
s51、建立失效率估计模块,表达式如下:
[0100][0101]
其中,为估计失效率;
[0102]
s52、将失效率估计模块的输入端与失效控制增益估计模块相连,通过失效率估计模块对无人船控制失效率进行估计。
[0103]
本发明还提供了一种基于上述推进器部分失效下的无人船控制失效率和扰动估计方法的系统,如图1所示,包括:无人船模型、扰动估计器模块、状态观测器模块、无人船失效控制增益估计模块与失效率估计模块,其中,连接关系如下:
[0104]
无人船模型的输入端与系统控制输入相连,无人船模型模块的输出端与当前时刻速度、当前时刻速度估计相连;
[0105]
扰动估计器模块输入端与系统控制输入、当前时刻速度、下一时刻速度估计、失效控制增益估计相连,扰动估计器模块的输出端与未知时变动力学不确定、无人船系统总扰动估计相连;
[0106]
状态观测器模块的输入端与无人船系统总扰动估计、未知时变动力学不确定、失效控制增益估计相连,状态观测器的输出端与下一时刻速度估计相连;
[0107]
失效控制增益估计模块的输入端与无人船当前时刻速度、无人船下一时刻速度估计相连,失效控制增益估计模块的输出端与失效控制增益估计相连;
[0108]
失效率估计模块的输入端与失效控制增益估计相连,失效率估计模块的输出端与控制失效率相连。
[0109]
实施例
[0110]
无人船模型设计如下:
[0111][0112]
σ(k)=m-1
xuu(k)+m-1
x
u|u|
u(k)|u(k)|+m-1
ω(k)
#
[0113]
其中参数:xu=-0.7225,x
u|u|
=-1.3274,ω=0.1sin(kt),t=0.02s,m=23.8kg,当实验时间t≥60s时,发生无人船推进器失效故障,失效率由0变成50%;
[0114]
扰动估计器设计方程为:
[0115][0116]
其中参数:t=0.02s,γ=4.25;
[0117]
状态观测器设计方程为:
[0118][0119]
其中参数:t=0.02s;
[0120]
无人船失效控制增益估计模块设计方程为:
[0121][0122][0123]
其中参数:t=0.02s;#
[0124]
失效率估计模块的设计方程为:
[0125][0126]
本发明系统首先给定无人船模型一个系统输入,然后通过建立扩张状态观测器进行状态观测得到当前时刻速度的观测值,同时把当前时刻速度分别导入到失效控制增益估计模块、扰动估计器模块中。在扰动估计器模块中得到系统总扰动与环境扰动的估计值,在失效控制增益估计模块种得到失效控制增益。最后利用失效率估计模块对无人船失效率进行估计。此方法保证了无人船在推进器部分失效情况下通过引入对无人船失效率的估计从而使得当无人船发生推进器部分失效时也能对外部扰动进行准确估计。
[0127]
为了验证本发明方法的有效性,进行了仿真实验,仿真结果如图2-5所示,图2为无人船速度示意图,图中u表示无人船的实际速度,表示无人船速度估计。可以得出所述状态观测器模块可以实现对无人船速度的准确估计。图3为系统总扰动s的观测图像,图中s代表实际的系统总扰动,代表通过状态观测器模块得到的系统总扰动估计。可以得出该估计方法可以对系统扰动进行准确估计。图4为无人船推进器失效控制增益的图像,图中代表无人船推进器实际控制增益,代表无人船推进器控制增益估计。可以得出实验时间为60s时,无人船推进器的控制增益发生改变,但此估计方法仍可以进行准确估计。图5为失效率示意图,图中α为实际失效率,为估计失效率。可以得出实验时间在60s时,无人船失效率发生改变,此时失效率估计模块可以对无人船失效率进行准确估计。
[0128]
由仿真结果可知:本发明提出的一种推进器部分失效下的无人船控制失效率和扰动估计方法及系统。引入了对无人船失效率的估计从而使得当无人船发生推进器部分失效时也能对外部扰动进行准确估计。同时引入了对控制器增益的估计,使得在原有的控制器增益改变时仍然能对外部扰动进行准确估计。
[0129]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1