关于栅格地图的拟合线段修正方法、机器人及芯片与流程
本发明涉及拟合线段处理的,特别是关于机器人构建的栅格地图的拟合线段修正方法、机器人及芯片。
背景技术:
1、在家居环境下,装配激光传感器(包括360度旋转激光雷达和固定式激光雷达)的移动机器人会将周围环境中的障碍物标记到地图上,一般在地图中利用拟合线段来表示平直障碍物,平直障碍物包括长条形障碍物(比如柜子、凳脚等平直障碍物)和直线型障碍物(比如位于室内的边界点处的墙面),但是激光传感器在采集点云的过程中携带有噪声点误差,线段拟合也存在计算误差,二者叠加,会造成拟合的线段不容易与实际环境内的长条形障碍物或直线型障碍物对齐,即出现小角度的偏移,进而后续构建地图过程中标记的线段也会相对于实际障碍物产生角度偏离。
技术实现思路
1、为了克服现有技术中的激光传感器的采样误差和由点云拟合出线段的过程中携带的计算误差,本发明公开关于栅格地图的拟合线段修正方法、机器人及芯片,具体的技术方案如下:
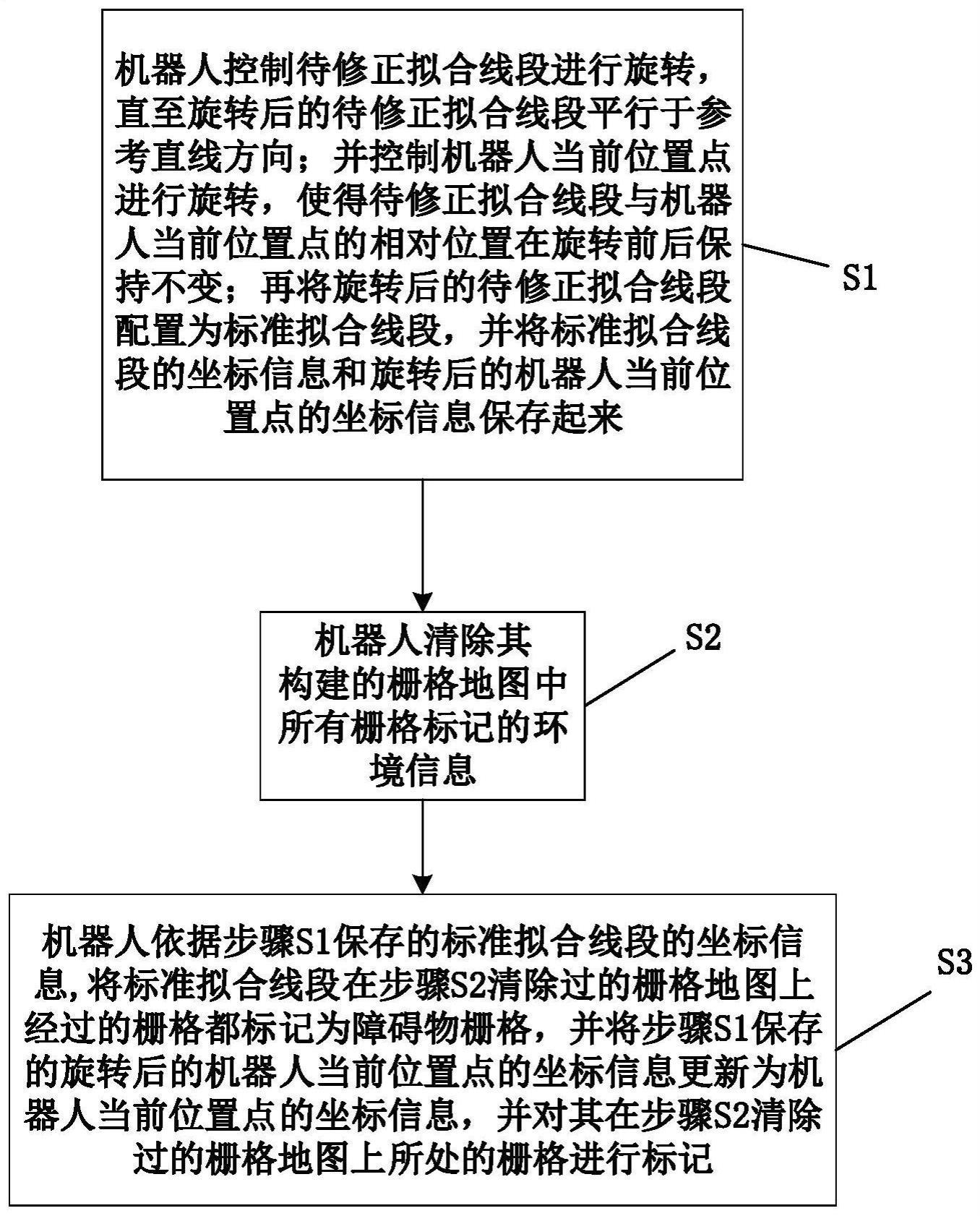
2、关于栅格地图的拟合线段修正方法,机器人装配有测距传感器,测距传感器用于采集反映障碍物占据区域的点云;其中,机器人当前位置点和采集的点云都转换到机器人构建的栅格地图中,并在对应的栅格内标记环境信息;机器人利用预设直线拟合规则对点云进行线性拟合,再从拟合出的拟合线段选取出符合平直特征的拟合线段,并将该拟合线段配置为待修正拟合线段;所述拟合线段修正方法包括步骤1、机器人控制待修正拟合线段进行旋转,直至旋转后的待修正拟合线段平行于参考直线方向;并控制机器人当前位置点进行旋转,使得机器人当前位置点与待修正拟合线段的相对位置在旋转前后保持不变;再将旋转后的待修正拟合线段配置为标准拟合线段,并将标准拟合线段的坐标信息和旋转后的机器人当前位置点的坐标信息保存起来;步骤2、机器人依据步骤1保存的标准拟合线段的坐标信息,将标准拟合线段在栅格地图中经过的栅格都标记为障碍物栅格,并将步骤1保存的旋转后的机器人当前位置点的坐标信息更新为机器人当前位置点的坐标信息;其中,旋转前后的待修正拟合线段的坐标信息、以及旋转前后的机器人当前位置点的坐标信息都属于栅格地图的坐标系下的坐标信息。
3、进一步地,在步骤1和步骤2之间,还包括:清除机器人构建的栅格地图中所有栅格标记的环境信息,使得步骤2所述的栅格地图是被清除过的栅格地图。
4、进一步地,所述步骤2包括:机器人在所述步骤2中将所述标准拟合线段在已清除过的栅格地图中经过的栅格都标记为障碍物栅格;同时按照旋转后的机器人当前位置点的坐标信息,在已清除过的栅格地图中对旋转后的机器人当前位置点所处的栅格进行标记,以便于机器人在其所处的最新栅格处开始构建地图。
5、进一步地,在所述步骤1中,待修正拟合线段所旋转的角度和机器人当前位置点所旋转的角度都是修正角度;所述修正角度是待修正拟合线段相对于参考直线方向偏移的角度,用于表示待修正拟合线段相对于平直障碍物存在的偏移程度;其中,所述参考直线方向是栅格地图的坐标系的横坐标轴正方向、坐标系的横坐标轴负方向、坐标系的纵坐标轴正方向、坐标系的纵坐标轴负方向,使得步骤2标记出的障碍物栅格沿着坐标系的坐标轴方向分布。
6、进一步地,在所述步骤1中,控制待修正拟合线段进行旋转的方法包括:控制待修正拟合线段绕着栅格地图的坐标系的原点,朝着预设旋转方向旋转所述修正角度,获得标准拟合线段,使得旋转后的待修正拟合线段平行于参考直线方向;其中,组成待修正拟合线段的点的坐标信息在旋转后相应地变换为组成标准拟合线段的点的坐标信息;在所述步骤1中,控制机器人当前位置点进行旋转的方法包括:控制机器人当前位置点绕着栅格地图的坐标系的原点,朝着预设旋转方向旋转所述修正角度,获得旋转后的机器人当前位置点;其中,机器人当前位置点与待修正拟合线段的相对位置等同于:旋转后的机器人当前位置点与标准拟合线段的相对位置;其中,预设旋转方向是顺时针方向或逆时针方向。
7、进一步地,所述控制待修正拟合线段进行旋转的方法包括控制待修正拟合线段的两个端点都绕着栅格地图的坐标系的原点,朝着预设旋转方向旋转所述修正角度,然后将旋转后的两个端点连接起来,得到标准拟合线段,使得旋转后的待修正拟合线段平行于参考直线方向;其中,栅格地图的坐标系的原点是旋转中心。
8、进一步地,所述步骤2标记出的障碍物栅格用于描述实际物理环境内的平直障碍物,使得平直障碍物在特定方向上的轮廓在栅格地图中是使用待修正拟合线段在所述参考直线方向上的投影来表示。
9、进一步地,平直障碍物相对于实际物理环境内的水平方向所成的夹角等于:标准拟合线段在栅格地图中与所述横坐标轴正方向所成的夹角,或标准拟合线段在栅格地图中与所述横坐标轴负方向所成的夹角;平直障碍物相对于实际物理环境内的竖直方向所成的夹角等于:标准拟合线段在栅格地图中与所述纵坐标轴正方向所成的夹角,或标准拟合线段在栅格地图中与所述纵坐标轴负方向所成的夹角。
10、进一步地,当平直障碍物是室内环境中的墙面时,平直障碍物是平行于机器人行进平面或垂直于机器人行进平面;当平直障碍物不是墙面时,平直障碍物是位于与室内环境的墙面平行或垂直的位置。
11、进一步地,在步骤2中,机器人依据已保存的标准拟合线段的坐标信息,将标准拟合线段在栅格地图中经过的栅格都标记为障碍物栅格的方法包括机器人在获取到步骤1保存的标准拟合线段的首尾两个端点的坐标信息后,在步骤s2清除过的栅格地图中标记出两个点,并将两个点的连线经过的栅格都标记为障碍物栅格;其中,标准拟合线段的坐标信息包括标准拟合线段的首尾两个端点的坐标信息,坐标信息包括横坐标和纵坐标。
12、进一步地,当测距传感器是激光传感器时,激光传感器扫描障碍物的表面时,获取到障碍物反馈回的采样点,然后控制采样点坐标变换为所述栅格地图中的定位点,其中,组成标准拟合线段的点或组成待修正拟合线段的点是属于定位点;其中,多个采样点的集合是所述点云;每个定位点位于对应栅格的边上或对应栅格的内部时,将该对应栅格配置为该定位点所处的栅格。
13、进一步地,在所述栅格地图中,栅格标记的环境信息包括自由状态、占用状态和未知状态;当该定位点是组成所述标准拟合线段的一个点时,则该定位点所处的栅格内标记的环境信息被更新为占用状态;其中,自由状态的栅格表示未被障碍所占用的位置区域,存在支持机器人通行的定位点;占用状态的栅格表示被障碍物占用的位置区域,组成实际环境内的障碍物映射到地图中的占用区域;未知状态的栅格表示机器人所构建的栅格地图中没有扫描出来的位置区域。
14、一种机器人,包括测距传感器、惯性传感器和至少一个处理器和存储于所述处理器中的计算机程序,测距传感器和惯性传感器都与处理器电性连接,所述处理器执行所述计算机程序时实现所述拟合线段修正方法。
15、一种芯片,所述芯片存储有计算机程序,所述计算机程序被处理器运行时实现所述拟合线段修正方法。
16、本发明控制待修正拟合线段和机器人当前位置点一同旋转,在不改变待修正拟合线段和机器人当前位置点的相对位置关系的前提下,让旋转后的待修正拟合线段平行于参考直线方向,再将旋转后的待修正拟合线段在地图坐标系中所经过的栅格都标记为障碍物栅格。
17、本发明将机器人选取出的原本能与栅格地图中的坐标轴方向(对应为实际环境中的竖直方向或水平方向)平行的待修正拟合线段修正为平行于栅格地图中的坐标轴方向的标准拟合线段,实现补偿相关的拟合计算误差和采样误差,且旋转前后的待修正拟合线段和机器人当前位置点的相对位置关系不变,从而保证机器人构建地图的精度,并能以平直的拟合线段去表示实际环境中的直线型障碍物,减少用于拟合墙体的拟合线段相对实际环境内的墙体所存在的偏移角度误差。
- 还没有人留言评论。精彩留言会获得点赞!