一种基于旋转三棱镜光电跟踪装置的闭环跟踪方法
1.本发明属于光电跟踪领域,具体涉及一种基于旋转三棱镜光电跟踪装置的闭环跟踪方法。
背景技术:
2.传统的光电跟踪主要是由万向架和快反镜构成粗精跟踪系统执行。这种系统一般体积大、造价成本高、转动惯量大。基于光束折射的旋转双棱镜光电跟踪系统具有体积小、成本低、转动惯量小等优点,越来越多的用在空间光通信、目标跟踪、激光雷达等领域。但旋转双棱镜系统存在视场盲区、控制奇异等问题。旋转三棱镜装置可有效解决这类问题。因此对旋转三棱镜装置的闭环跟踪方法进行研究,具有重要的意义。相比于旋转双棱镜装置,旋转三棱镜装置的视轴偏移与三块棱镜的旋转具有更强的耦合关系。
3.在现有技术中,michael s
á
nchez等人(s
á
nchez m,gutow d.control laws for a three-element risley prism optical beam pointer[j].international society for optics and photonics,2006,6304:630403.)和li anhu等人(li a,sun w.forward and inverse solutions for three-element risley prism beam scanners[j].optics express,2017,25(7):7677.)针对旋转三棱镜装置进行了反解技术研究。这两项技术并未涉及三棱镜装置的跟踪方法。李锦英等在专利cn106802672a提出了一种基于旋转双棱镜装置的实时闭环跟踪方法,解决了双棱镜系统跟踪误差与棱镜旋转之间的强耦合关系。
技术实现要素:
[0004]
本发明要解决的技术问题为克服现有技术的不足,针对旋转三棱镜装置的跟踪问题,提出一种基于旋转三棱镜光电跟踪装置的闭环跟踪方法。本方法根据图像传感器反馈的视轴偏差,利用解耦算法输出三块棱镜的调整量,实现闭环跟踪。该方法解决了旋转三棱镜装置中图像传感器的视轴偏差与棱镜旋转量之间的强耦合关系。
[0005]
本发明提出的技术方案如下:
[0006]
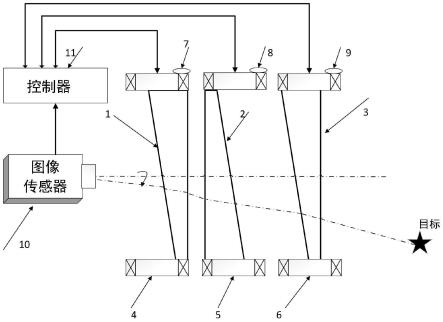
一种基于旋转三棱镜光电跟踪装置的闭环跟踪方法,其中,所述装置由第一棱镜1、第二棱镜2、第三棱镜3、第一电机4、第二电机5、第三电机6、第一编码器7、第二编码器8、第三编码器9、图像传感器10和控制器11组成;所述第一电机4、第二电机5和第三电机6分别与第一棱镜1、第二棱镜2和第三棱镜3相连;所述第一编码器7、第二编码器8和第三编码器9用于分别将第一棱镜1、第二棱镜2和第三棱镜3绕旋转轴旋转后的角度返回给控制器11,所述图像传感器10用于反馈目标成像点的位置给控制器11;所述控制器11基于图像传感器10反馈的视轴偏移量,结合解耦闭环跟踪方法,驱动第一电机4、第二电机5和第三电机6直至系统闭环;所述旋转三棱镜装置闭环跟踪方法包括以下步骤:
[0007]
步骤1):通过目标的引导信息(方位角θ0和俯仰角φ0),引导目标的成像点进入图像传感器10的视场内;若无法获取目标的引导信息,利用扫描的方式捕获目标,使目标的成像点在图像传感器10的视场内。此时图像传感器10反馈的视轴偏差的方位角误差为δθ、
俯仰角误差为δφ。
[0008]
步骤2):在控制器11中,对误差信号进行解耦。误差解耦算法的如公式(1)所示:
[0009][0010]
(1)式中分别为第一棱镜1,第二棱镜2,第三棱镜3下一时刻所需调整的角度值:θ1,θ2,θ3分别为第一棱镜1,第二棱镜2,第三棱镜3当前时刻由第一编码器7、第二编码器8、第三编码器9反馈的角度值。f(δθ)为方位角误差对应的旋转量,g(δφ)为俯仰角误差对应的旋转量,如公式(2)所示:
[0011][0012]
g1(s)和g2(s)表示设计的控制算法。
[0013]
步骤3):根据控制器11解耦出的第一棱镜1,第二棱镜2,第三棱镜3下一时刻的所需调整角度值,驱动第一电机4、第二电机5、第三电机6旋转,使第一棱镜1,第二棱镜2,第三棱镜3转动到对应的位置。
[0014]
步骤4):重复步骤2)、步骤3)运动目标的成像点便可一直稳定在探测器的视场中心。
[0015]
进一步地,所述旋转三棱镜装置中,所述第一棱镜1、第二棱镜2、第三棱镜3和第一电机4、第二电机5、第三电机6为同轴安装,且第一棱镜1、第二棱镜2、第三棱镜3具有相同的折射率和顶角。
[0016]
本发明与现有技术相比优点在于:
[0017]
旋转三棱镜装置对目标进行跟踪,可克服旋转双棱镜跟踪设备中的视场盲区、奇异控制等问题。本发明填补了旋转三棱镜装置对目标闭环跟踪技术的空白。通过对视轴偏移进行充分解耦,旋转三棱镜装置可对目标进行高精度的跟踪。本发明具有跟踪精度高,实现简单等优点。
附图说明
[0018]
图1为本发明一种基于旋转三棱镜光电跟踪装置的闭环跟踪方法利用的基于旋转三棱镜光电跟踪装置示意图,其中,1为第一棱镜,2为第二棱镜,3为第三棱镜,4为第一电机,5为第二电机,6为第三电机,7为第一编码器,8为第二编码器,9为第三编码器,10为图像传感器,11为控制器;
[0019]
图2为闭环跟踪过程中方位误差曲线;
[0020]
图3为闭环跟踪过程中俯仰误差曲线;
[0021]
图4为第一棱镜所处角度值曲线;
[0022]
图5为第二棱镜所处角度值曲线;
[0023]
图6为第三棱镜所处角度值曲线。
具体实施方式
[0024]
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。
[0025]
图1所示为本发明所使用的旋转三棱镜装置的示意图,该装置由第一棱镜1、第二棱镜2、第三棱镜3、第一电机4、第二电机5、第三电机6、第一编码器7、第二编码器8、第三编码器9、图像传感器10和控制器11组成;其中第一棱镜1、第二棱镜2、第三棱镜3、第一电机4、第二电机5、第三电机6为同轴安装;其中第一棱镜1、第二棱镜2、第三棱镜3具有相同的折射率1.517和顶角10
°
;第一电机4、第二电机5、第三电机6分别与第一棱镜1、第二棱镜2、第三棱镜3相连;第一编码器7、第二编码器8、第三编码器9可分别返回第一棱镜1、第二棱镜2、第三棱镜3绕旋转轴旋转后的角度θ1,θ2,θ3,并将θ1,θ2,θ3返回给控制器11;图像传感器10返回目标的视轴偏差给控制器11。视轴偏差由两部分组成,一部分为方位误差,另一部分为俯仰误差。
[0026]
本发明所采用的一种基于旋转三棱镜光电跟踪装置的闭环跟踪方法,该方法执行过程如下:
[0027]
1)通过扫描或给定的引导信息,将目标的成像点引入图像传感器的视场内;假定通过扫描的方式,图像传感器捕获到目标。此时第一棱镜所处位置值为92.02
°
,第二棱镜所处位置值为-71.90
°
,第三棱镜所处位置值为41.24
°
。方位角误差δθ=206.2角秒,俯仰角误差δφ=103.1角秒。
[0028]
2)在控制器11中,对误差信号进行解耦。误差解耦算法的如公式(1)所示:
[0029][0030]
(1)式中分别为第一棱镜1,第二棱镜2,第三棱镜3下一时刻所需调整的角度值:θ1,θ2,θ3分别为第一棱镜1,第二棱镜2,第三棱镜3当前时刻由第一编码器7、第二编码器8、第三编码器9反馈的角度值。f(δθ)为方位角误差对应的旋转量,g(δφ)为俯仰角误差对应的旋转量,如公式(2)所示:
[0031][0032]
g1(s)和g2(s)均设计为pi控制器,s为拉普拉斯算子。
[0033]
3)根据控制器11解耦出的第一棱镜1、第二棱镜2、第三棱镜3下一时刻的所需调整角度值,驱动第一电机4、第二电机5、第三电机6旋转,使第一棱镜1、第二棱镜2、第三棱镜3转动到对应的位置。
[0034]
4)重复迭代上述过程2)、3),直到闭环精度达到。
[0035]
上述闭环过程可通过图2-6反映:图2为闭环跟踪过程中方位误差曲线,方位跟踪误差从210角秒快速减小到0角秒附近;图3为闭环跟踪过程中俯仰误差曲线,俯仰跟踪误差从150角秒快速减小到0角秒附近;图2和图3表明本发明方法能够有效地减少跟踪误差。图4为第一棱镜所处角度值曲线;图5为第二棱镜所处角度值曲线;图6为第三棱镜所处角度值
曲线,第一棱镜,第二棱镜和第三棱镜在闭环过程中,棱镜最大调整量均小于1度,表明了该方法对误差解耦较为充分;
[0036]
以上所述,仅为本发明中的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉该技术的人在本发明所揭示的技术范围内,可理解想到的变换或替换,都应涵盖在本发明的包含范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1