一种人物跟随识别确定方法及设备与流程
1.本发明涉及人物识别设备技术领域,具体为一种人物跟随识别确定方法及设备。
背景技术:
2.众所周知,随着科学技术的飞速发展,利用摄像机来监控动态场景早已被广泛应用于社会各个领域,例如对安全性要求敏感的门禁系统、安全监控。由于广泛的应用前景和潜在的经济价值,人体运动的视频监控是近年来备受关注的前沿课题。
3.例如公开号为“cn108764369a”专利名称为:“基于数据融合的人物识别方法、装置和计算机存储介质”的专利,专利公开了“本发明公开了一种基于数据融合的人物识别方法,包括:获取多个用户的各类id数据及对应的数据采集时间点和地点,将同一地点采集的id数据按采集时间点从先到后排序,并按不同地点分别保存所述排序;获取预设的参数值,并根据所述参数值得到各个所述排序中同一个用户的id关联对;根据所述id关联对计算各类id数据正确关联同一个用户的正确率;根据所述正确率确定人物识别参数值。本发明还公开了一种基于数据融合的人物识别装置和计算机存储介质,实现通过自学习模型训练得到人物识别参数值,并在获得同一地点的多个id 数据时,利用该人物识别参数值基于数据融合以确定所述多个id数据是否属于同一个用户”。
4.现有的基于数据融合的人物识别方法、装置和计算机存储介质在使用中发现,其不能够对目标范围内的人进行筛分,局部放大,跟随记录,导致其使用局限性较高。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种准确的人物跟随识别确定方法及设备。
7.(二)技术方案
8.为实现上述目的,本发明提供如下技术方案:一种人物跟随识别确定方法,包括如下步骤:
9.步骤1、系统通过采用inceptionv2模型侦测人数;
10.步骤2、侦测人数为1人时,系统控制设备对侦测到的人物进行取像同时进行特征记录,侦测人数为2人以上时,系统通过person-reidentification 模型对目标范围内的人做人形侦测;
11.步骤3、人形侦测产生目标物,系统控制设备对目标物进行取像同时进行特征记录。
12.优选的,本发明进一步提供了所述步骤2中人形侦测方法包括如下步骤:
13.s1、系统根据摄像机坐标建立世界坐标,系统将侦测区域分为若干个侦测区间,当前目标范围内的人经过侦测区间时,设备对目标物进行连续的特征记录并取特征平均值;
14.s2、新的目标范围内的人经过侦测区间时,设备对目标物进行连续的特征记录并取平均之后与之前目标人物的特征平均值做对比,取相似度最高的为目标物,系统对检测
到的人形根据世界坐标做id配置;
15.s3、经过相似度筛选剩余1人时,取该人为目标物,经过相似度筛选超过2人以上时,id配置与步骤s2中一致者,取目标id一致者为目标物,没有id配置与步骤s2中一致,取相似度最大者为目标物。
16.本发明进一步提供了一种人物跟随识别确定设备,包括:移动小车、摄像头和控制器,所述移动小车与所述控制器连接。
17.优选的,所述控制器执行权利要求1-2中任意一项所述的一种人物跟随识别确定方法中的步骤。
18.优选的,所述移动小车周侧设置有超声波发生器,所述超声波发生器设置为多组均匀布置。
19.(三)有益效果
20.与现有技术相比,本发明提供了一种人物跟随识别确定方法及设备,具备以下有益效果:
21.该人物跟随识别确定方法及设备,通过远程控制小车上的控制器,小车负责移动控制器和摄像头,方便对人物进行跟随拍摄,设备可以对目标区域内的所有人进行特征分析,对相似度最高的人进行图像放大和特征记录,准确度高,移动小车通过超声波传感器避障,使用方便。
附图说明
22.图1为本发明结构控制器系统示意图;
23.图2为本发明结构人形检测系统示意图;
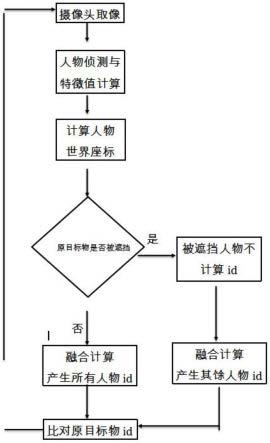
24.图3为本发明遇到遮挡状态图;
25.图4为本发明的画面图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.请参阅图1-4,一种人物跟随识别确定方法,包括如下步骤:
28.步骤1、系统通过采用inceptionv2模型侦测人数;
29.步骤2、侦测人数为1人时,系统控制设备对侦测到的人物进行取像同时进行特征记录,侦测人数为2人以上时,系统通过person-reidentification 模型对目标范围内的人做人形侦测;
30.步骤3、人形侦测产生目标物,系统控制设备对目标物进行取像同时进行特征记录。
31.本发明进一步提供了所述步骤2中人形侦测方法包括如下步骤:
32.s1、系统根据摄像机坐标建立世界坐标,系统将侦测区域分为若干个侦测区间,当前目标范围内的人经过侦测区间时,设备对目标物进行连续的特征记录并取特征平均值;
33.s2、新的目标范围内的人经过侦测区间时,设备对目标物进行连续的特征记录并取平均之后与之前目标人物的特征平均值做对比,取相似度最高的为目标物,系统对检测到的人形根据世界坐标做id配置;
34.s3、经过相似度筛选剩余1人时,取该人为目标物,经过相似度筛选超过2人以上时,id配置与步骤s2中一致者,取目标id一致者为目标物,没有id配置与步骤s2中一致,取相似度最大者为目标物。
35.本发明进一步提供了一种人物跟随识别确定设备,包括:移动小车、摄像头和控制器,所述移动小车与所述控制器连接。
36.所述控制器执行权利要求1-2中任意一项所述的一种人物跟随识别确定方法中的步骤。
37.所述移动小车周侧设置有超声波发生器,所述超声波发生器设置为多组均匀布置。
38.在进行inceptionv2模型推理时,会包含站立、蹲姿、坐着或平躺等人形动作,会限定图像的宽高比例,控制器可以与外部进行信息传递,控制器通过摄像头采集信息,同时控制移动小车移动,跟随目标物,对目标物作出持续的记录,移动小车周侧设置有多组超声波传感器,方便移动小车避障,移动小车上设置有蓄电池,作为持续运作的能源,设备识别准确度高,可以自动跟随目标物,使用方便。
39.距离流程如下:具体的,控制器采用深度模型(inceptionv2)侦测人数并通过深度模型(person-reidentification/re-id)记录每个人数的特征记录,(2)摄像头画面为2d画面,所以每个侦测到的人物皆会有一最大涵盖区域,称为该人物的roi,(3)每一个2d平面的roi可以推出其世界座标,进而得知每个人物的前后左右,并得知每个人物的相对关系位置。于是本发明在这数据上实作一融合演算法让每个人物有唯一id达到追踪目的,进而实现实时人物跟随小车移动。
40.具体可以参照附图3:其中
41.(1)画面框框为侦测到的人物,并同时为该2d画面人物的roi
42.(2)经过re-id推出该人物特徵并实时做平均调整
43.(3)实时计算出世界座标并于原目标物做距离判断(指数衰减)
44.(4)融合上述数据获得追踪id值。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1