一种光纤成端设备的研磨压力控制方法
1.本发明属于自动控制技术领域,具体涉及一种光纤成端设备的研磨压力控制方法。
背景技术:
2.光纤成端设备多使用研磨机进行成端,现有的光纤研磨电机采用中心加压和四角加压的方法对光纤连接器施加研磨压力,不同的研磨步骤施加的研磨压力不同,而光纤研磨过程中每个步骤内需要所受到的研磨压力恒定。新型光纤成端设备将光纤成端步骤集成到一台设备,因此光纤研磨压力在不同研磨步骤中需要进行调整。然而现有的光纤成端设备通过弹簧提供研磨压力,弹簧的形变信号不能及时进行处理,导致在研磨期间不能使研磨压力恒定。因此,亟需一种可提高控制器的反应速度和控制精度,可更好的控制研磨压力的光纤成端设备研磨压力控制方法。
技术实现要素:
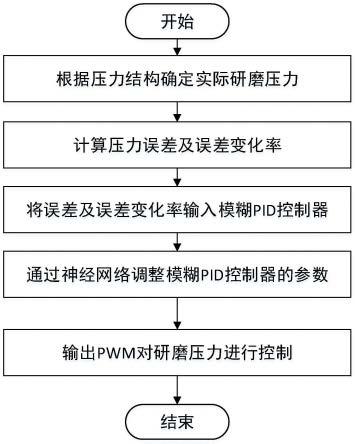
3.针对现有技术存在的不足,本发明提出了一种光纤成端设备的研磨压力控制方法,该方法包括:
4.s1:根据光纤成端设备的压力结构,得到实际研磨压力;
5.s2:根据设定研磨压力和实时研磨压力计算设定研磨压力和实际研磨压力的误差和误差变化率;
6.s3:将设定研磨压力和实际研磨压力的误差和误差变化率输出到模糊pid控制器中;
7.s4:采用模糊神经网络对模糊pid控制器的参数进行调整,得到精确控制参数;
8.s5:根据精确控制参数计算精确控制量;
9.s6:将精确控制量转变为pwm信号,采用pwm信号对步进电机进行调整从而对研磨压力进行控制。
10.优选的,得到实际研磨压力的过程包括:位置传感器获取位置移动变量;根据位置移动变量得到弹簧变形程度;根据弹簧变形程度计算实际研磨压力。
11.优选的,模糊神经网络包括输入层、模糊化层、模糊推理层和输出层。
12.进一步的,输入层描述为:
[0013][0014]
其中,表示模糊pid控制器的输入,xi表示第i个输入,e表示设定研磨压力和实际研磨压力的误差,ec表示设定研磨压力和实际研磨压力的误差变化率。
[0015]
进一步的,模糊化层描述为:
[0016][0017]
其中,表示模糊化层输出,表示模糊pid控制器的输入,c
ij
表示第i个输入变量属于第j个模糊集合时的隶属函数的均值,b
ij
表示第i个输入变量属于第j个模糊集合时的隶属函数的标准差。
[0018]
进一步的,模糊推理层描述为:
[0019][0020]
其中,表示模糊推理层输出,表示模糊化层输出,n表示模糊推理层每个节点的输入信号数量,ni表示输入层中第i个输入的隶属函数的个数即模糊化层的节点数,n表示模糊推理层节点总数。
[0021]
进一步的,输出层描述为:
[0022][0023]
其中,表示输出层输出,ω(i,j)表示模糊推理层和输出层之间的连接权值,表示模糊推理层输出,n表示模糊推理层每个节点的输入信号数量。
[0024]
优选的,计算精确控制量的公式为:
[0025]
δu(n)=k
p
e(k)+ki(e(k)-e(k-1))+k
p
[e(k)-2e(k-1)+e(k-2)]
[0026]
其中,δu(n)表示pd控制器增量,ko表示比例系数,ki表示积分系数,kd表示微分系数,e(k)表示当前时刻设定研磨压力与实际研磨压力的误差,e(k-1)表示前一时刻设定研磨压力与实际研磨压力的误差,e(k-2)表示再前一时刻设定研磨压力与实际研磨压力的误差。
[0027]
本发明的有益效果为:本发明获取实际研磨压力和设定研磨压力的误差和误差变化率并将其输入到pid控制器中,通过采用模糊神经网络对pid控制器的参数进行调整,输出精确控制量,步进电机根据精确控制量进行研磨压力控制;本发明通过神经网络的学习能力和适应能力提高控制器的反应速度和控制精度,可更好的控制研磨压力,使得光纤成端效果更好,进而提高光信号的传输质量,实用性高,具有良好的应用前景。
附图说明
[0028]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
[0029]
图1为本发明中光纤成端设备的研磨压力控制方法流程图;
[0030]
图2为本发明中光纤成端设备中的压力结构示意图;
[0031]
图3为本发明中模糊神经网络pid控制原理示意图;
[0032]
图4为本发明中模糊神经网络结构示意图;
[0033]
图中:1、压力结构底板;2、光纤连接器夹具;3、位置传感器;4、第一固定柱体;5、第二固定柱体;6、第一传力棒;7、第二传力棒。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
本发明提出了一种光纤成端设备的研磨压力控制方法,如图1所示,所述方法包括:
[0036]
s1:根据光纤成端设备的压力结构,得到实际研磨压力;
[0037]
s2:根据设定研磨压力和实时研磨压力计算设定研磨压力和实际研磨压力的误差和误差变化率;
[0038]
s3:将设定研磨压力和实际研磨压力的误差和误差变化率输出到模糊pid控制器中;
[0039]
s4:采用模糊神经网络对模糊pid控制器的参数进行调整,得到精确控制参数;
[0040]
s5:根据精确控制参数计算精确控制量;
[0041]
s6:将精确控制量转变为pwm信号,采用pwm信号对步进电机进行调整从而对研磨压力进行控制。
[0042]
如图2所示,压力结构底板1随着压力控制可上下移动,光纤连接器夹具2的中心开有光纤连接器的插口,在研磨过程中将光纤连接器固定在夹具中进行研磨。第一固定柱体4和第二固定柱体5分别与设备的大架连接,并对第一传力棒6和第二传力棒7起固定的作用。第一传力棒6和第二传力棒7分别与光纤连接器夹具2和底板1连接且在第一固定柱体4和第二固定柱体5内可以自由活动。在固定柱体下方设置有弹簧,通过步进电机可以使光纤连接器夹具2在研磨过程中可以上下移动,对光纤连接器提供研磨压力。位移传感器3的位置与弹簧上端的位置一致,位置传感器3可通过传感器检测位置位移变化进而检测弹簧的形变程度。
[0043]
根据光纤成端设备的压力结构,得到实际研磨压力;具体的,位置传感器获取位置移动变量;根据位置移动变量得到弹簧变形程度;根据弹簧变形程度、已知的弹簧系数,采用弹力计算公式可计算出研磨电机研磨时光纤施加实际研磨压力。
[0044]
光纤成端过程中,不同的研磨步骤需要使用不同的研磨压力,整个研磨的控制过程为闭环控制,控制芯片可以实时获得光纤所受到的实际研磨压力;根据设定研磨压力和实时研磨压力计算设定研磨压力和实际研磨压力的误差和误差变化率。
[0045]
e=p
′‑
p
[0046]
ec==e(k)-e(k-1)
[0047]
其中,e表示设定研磨压力和实际研磨压力的误差,ec表示设定研磨压力和实际研磨压力的误差变化率,p表示实时研磨压力,p
′
表示设定研磨压力,e(k-1)表示前一时刻设定研磨压力与实际研磨压力的误差。
[0048]
将设定研磨压力和实际研磨压力的误差和误差变化率输出到模糊pid控制器中进
行处理。
[0049]
本发明通过采用模糊神经网络对模糊pid控制器的参数进行调整;在所设计的模糊神经网络中,模糊神经网络的输入节点为模糊系统的输入信号,模糊神经网络的输出节点为模糊系统的输出信号。
[0050]
模糊pid控制器的控制过程需要对输入的精确量进行模糊化操作,模糊化后的输入量对应相应的模糊控制规则和模糊推理规则,将推理后的模糊规则所对应的控制量进行输出控制,将模糊神经网络的每个神经元对应模糊控制器的各个步骤。神经网络的隐含层表示模糊系统中的模糊化和模糊推理,神经网络中每层节点表示模糊系统的隶属函数和模糊规则。模糊神经网络pid控制原理如图3所示,通过模糊神经网络对pid控制器的参数进行调整进而对被控对象进行控制。如图4所示,模糊神经网络包括输入层、模糊化层、模糊推理层和输出层;各层的描述如下:
[0051]
输入层描述为:
[0052][0053]
其中,表示模糊pid控制器的输入,xi表示第i个输入,e表示设定研磨压力和实际研磨压力的误差,ec表示设定研磨压力和实际研磨压力的误差变化率。
[0054]
模糊化层描述为:
[0055][0056]
其中,i=1,2;j=1,2,
……
,7;表示模糊化层输出,表示模糊pid控制器的输入;c
ij
表示第i个输入变量属于第j个模糊集合时的隶属函数的均值,b
ij
表示第i个输入变量属于第j个模糊集合时的隶属函数的标准差,也被称为中心和宽度。
[0057]
该层有7个节点,分别将输出层的2个输入划分到7个模糊集,利用隶属度函数分别计算出两个输入变量属于7个模糊集合的程度;优选的,采用高斯函数作为隶属度函数。
[0058]
模糊推理层描述为:
[0059]
模糊化层的功能是实现模糊推理,在该层中,每一个节点都是一条模糊规则,共49个模糊规则;每个节点的输出都可以计算为在该节点所有输入信号的乘积即:
[0060][0061]
其中,表示模糊推理层输出,表示模糊化层输出,n表示模糊推理层每个节点的输入信号数量,ni表示输入层中第i个输入的隶属函数的个数即模糊化层的节点数,n表示模糊推理层节点总数。
[0062]
输出层描述为:
[0063]
[0064]
其中,i=1,2,3;f
i4
表示输出层输出,k
p
、ki和kd均为模糊pid控制器的控制系数,具体的,k
p
表示比例系数,ki表示积分系数,kd表示微分系数;ω(i,j)表示模糊推理层和输出层之间的连接权值,n表示模糊推理层每个节点的输入信号数量。
[0065]
输出层进行反模糊化推理,将模糊控制参数转换为精确控制参数。
[0066]
根据精确控制参数计算精确控制量;具体的,模糊pid控制器采用增量式pid控制器,为实现对步进电机的控制,将精确控制参数转化为精确控制量;增量式pid控制器的pid控制律为:
[0067]
δu(n)=k
p
x(1)+kix(2)+kdx(3)
[0068]
x(1)=e(k)
[0069]
x(2)=e(k)-e(k-1)
[0070]
x(3)=e(k)-2e(k-1)+e(k-2)
[0071]
其中,δu(n)表示piid控制器增量,k
p
表示比例系数,ki表示积分系数,kd表示微分系数,e(k)表示当前时刻设定研磨压力与实际研磨压力的误差,e(k-1)表示前一时刻设定研磨压力与实际研磨压力的误差,e(k-2)表示再前一时刻设定研磨压力与实际研磨压力的误差即前一时刻的上一时刻设定研磨压力与实际研磨压力的误差;
[0072]
使用delta学习规则来修正参数,目标函数为式中,r(k)和y(k)为理想输出和实际输出。网络权值的学习算法为:
[0073][0074]
同理:
[0075][0076][0077]
当前时刻的网络权值为:
[0078]
ω
ij
(k)=ω
ij
(k-1)+δω
ij
(k)+α(ω
ij
(k-1)-ω
ij
(k-2))
[0079]
其中,η表示学习速率,α为学习动量因子,优选的,取η=0.15,α=0.02;k为迭代步骤;δω
ij
(k)表示网络权值变化量,δc
ij
(k)表示隶属度函数均值变化量,δb
ij
(k)表示隶属度函数标准差变化量。
[0080]
将精确控制量转变为pwm信号,采用pwm信号对步进电机进行调整从而对研磨压力进行控制;通过将模糊神经网络输出的pid控制器参数转换为步进电机pwm脉宽调制信号,
使步进电机所控制的研磨压力能够快速达到设定的研磨压力,并在相应的研磨步骤中恒定保持。
[0081]
本发明获取实际研磨压力和设定研磨压力的误差和误差变化率并将其输入到pid控制器中,通过采用模糊神经网络对pid控制器的参数进行调整,输出精确控制量,步进电机根据精确控制量进行研磨压力控制;本发明通过神经网络的学习能力和适应能力提高控制器的反应速度和控制精度,可更好的控制研磨压力,使得光纤成端效果更好,进而提高光信号的传输质量,实用性高,具有良好的应用前景。
[0082]
以上所举实施例,对本发明的目的、技术方案和优点进行了进一步的详细说明,所应理解的是,以上所举实施例仅为本发明的优选实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1