一种面向大型航天器在轨装配的多目标优化控制方法
1.本发明属于航天器技术领域,具体涉及一种面向大型航天器在轨装配的多目标优化控制方法。
背景技术:
2.大型航天器是未来空间资源利用、宇宙奥秘探索、长期在轨居住的重大战略性航天装备,无法通过单次发射和入轨展开方式进行构建,通常是需要多次发射以及在轨装配进行建造,组装过程中大型航天器大尺度与构型变化导致质量特性难以精确已知,而大型航天器的姿轨稳定控制与大型结构振动存在非线性耦合,并且在实际的空间工作环境中,控制器增益摄动、执行机构故障、输入受限或饱和以及输入时滞等都会使大型航天器轨道-姿态-振动一体化控制问题变得更加复杂。同时,由于在轨服务/装配受窗口限制,如果不能在有限时间内达到轨道-姿态-振动一体化控制,必须重新选择服务窗口,这必然导致空间资源浪费,严重影响在轨服务寿命。如果服务窗口重新选择,在轨装配进度将会滞后,导致大型航天器重新规划装配路径,进一步增加星载计算机工作负载,造成星载资源浪费,上述诸多不利因素均使得大型航天器在与空间环境的相互作用下的稳定控制面临巨大挑战。
3.目前,面向大型航天器在轨装配的控制方法通常要求在大型航天器在轨装配过程中各时刻的质量特性为精确的先验信息,因此需要花费较高的成本进行高精度的质量信息辨识,而且同时考虑并实现大型航天器的姿态、轨道和振动一体化控制的方法并不多见,除此之外,同时兼顾控制器增益摄动、执行机构故障、输入受限或饱和以及输入时滞等不利因素的可靠控制方法尚未成熟,且长期的高质量在轨服务需要考虑燃料消耗和包含快速性以及精确性在内的多目标控制性能约束。
4.因此,如何实现大型航天器在轨装配过程轨道-姿态-振动的一体化多目标优化控制,是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本发明的目的是为了实现在大型航天器在轨装配过程中轨道-姿态-振动的一体化多目标优化控制,减少空间资源浪费和星载资源浪费,提出了一种面向大型航天器在轨装配的多目标优化控制方法。
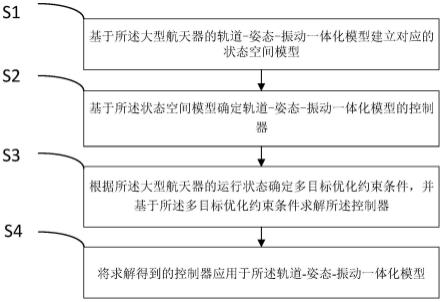
6.本发明的技术方案为:一种面向大型航天器在轨装配的多目标优化控制方法,包括以下步骤:
7.s1、基于所述大型航天器的轨道-姿态-振动一体化模型建立对应的状态空间模型;
8.s2、基于所述状态空间模型确定轨道-姿态-振动一体化模型的控制器;
9.s3、根据所述大型航天器的运行状态确定多目标优化约束条件,并基于所述多目标优化约束条件求解所述控制器;
10.s4、将求解得到的控制器应用于所述轨道-姿态-振动一体化模型。
11.进一步地,所述状态空间模型π具体如下式所示:
12.π:
13.式中,t表示时间,是包括大型航天器轨道、姿态和模态在内的受控状态变量相对时间的导数,a为所述轨道-姿态-振动一体化动力学模型经线性化后得到的状态矩阵,δa表示由建模误差和惯性未知对状态矩阵a造成的不确定性矩阵,x(t)为包含了大型航天器轨道、姿态和模态在内的受控状态变量,b1为控制矩阵,δb1表示由建模误差和惯性未知对控制矩阵b1造成的扰动矩阵,u(t)为所述轨道-姿态-振动一体化控制器,b2为干扰矩阵,δb2表示由建模误差和惯性未知对干扰矩阵b2造成的扰动矩阵,w(t)为包含外界干扰和执行机构故障的总干扰,y(t)为测量输出向量,c为依据状态变量的实际可测量性选取的测量矩阵,v(t)为测量误差向量。
14.进一步地,所述控制器u(t)具体如下式所示:
15.u(t)=u(t,λ(um,t),d(τ),k,δk(t))
16.式中,t为时间,λ(um,t)为输入饱和函数,um为输入力矩各分量的绝对值的最大值,d(τ)为输入时滞函数,k为所述控制器的增益矩阵,δk(t)为所述控制器的增益摄动,u为由时间t、输入饱和函数λ(um,t)、输入时滞函数d(τ)、控制器增益矩阵k和控制器的增益摄动δk(t)复合而成的复合函数。
17.进一步地,所述步骤s3中运行状态包括第一状态和第二状态,所述第一状态具体为所述大型航天器处于在轨装配时期或接受在轨服务状态,所述第二状态具体为所述大型航天器处于正常在轨运行且受到干扰失稳状态,所述第一状态对应的多目标优化约束条件为j1,所述第二状态对应的多目标优化约束条件为j2,所述多目标优化约束条件的表达式如下所示:
[0018][0019][0020]
其中,t0表示开始对大型航天器施加控制的时刻,为完成控制所需的时间,其中α》0,β》0,p》1,0《q《1为待优化的变量,为待选取的参数,其中i=1,2,3,4;j=1,2,且η(t)表示柔性航天器的模态位移向量,η
t
(t)为η(t)的转置,表示模态位移相对于时间的导数,为的转置,r
11
为大型航天器处于在轨装配时期或接受在轨服务状态时选取的决定振动能量消耗的权值矩阵,为柔性航天器的刚度矩阵,t表示时间,x(t)即为包含大型航天器轨道、姿态和模态在内的受控状态变量,x
t
(t)为x(t)的转置,u(t)为轨道-姿态-振动一体化控制器,u
t
(t)为u(t)的转置,r
12
为大型航天器处于在轨装配时期或接受在轨服务状态时选取的决定总能量消耗的权值矩阵,q1为大型航天器处于在轨装配时期或接受在轨服务状态时选取的决定系统稳定精度的权值矩阵,r
21
为大型航天器处于正常在轨运行且受到干扰失稳状态时选取的决定振动能量消耗的权值矩阵,r
22
为大型航天器处于正常在轨运行且受到干扰失稳状态时选取的决定总能量消耗的权值矩阵。q2为大型航天器处于正常在轨运行且受到干扰失稳状态时选取的决定系统稳定精度的权值矩阵,d为微分运算符号。
[0021]
与现有技术相比,本发明具备以下有益效果:
[0022]
本发明通过基于大型航天器的轨道-姿态-振动一体化模型建立对应的状态空间模型;基于所述状态空间模型确定轨道-姿态-振动一体化的控制器;根据大型航天器的运行状态确定多目标优化约束条件,并基于多目标优化约束条件求解所述控制器;将求解得到的控制器应用于轨道-姿态-振动一体化模型,实现了大型航天器在轨装配过程中的多目标优化控制,减少了空间资源浪费和星载资源浪费。
附图说明
[0023]
图1所示为本发明实施例提供的一种面向大型航天器在轨装配的多目标优化控制方法的流程示意图。
具体实施方式
[0024]
下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0025]
如图1所示为本技术实施例提出的一种面向大型航天器在轨装配的多目标优化控制方法的流程示意图,该方法包括以下步骤:
[0026]
步骤s1、基于所述大型航天器的轨道-姿态-振动一体化模型建立对应的状态空间模型。
[0027]
在本技术实施例中,所述状态空间模型π具体如下式所示:
[0028]
π:
[0029]
式中,t表示时间,是包括大型航天器轨道、姿态和模态在内的受控状态变量相对时间的导数,a为所述轨道-姿态-振动一体化动力学模型经线性化后得到的状态矩阵,δa表示由建模误差和惯性未知对状态矩阵a造成的不确定性矩阵,x(t)为包含了大型航天器轨道、姿态和模态在内的受控状态变量,b1为控制矩阵,δb1表示由建模误差和惯性未知对控制矩阵b1造成的扰动矩阵,u(t)为所述轨道-姿态-振动一体化控制器,b2为干扰矩阵,δb2表示由建模误差和惯性未知对干扰矩阵b2造成的扰动矩阵,w(t)为包含外界干扰和执行机构故障的总干扰,y(t)为测量输出向量,c为依据状态变量的实际可测量性选取的测量矩阵,v(t)为测量误差向量。
[0030]
具体的,大型航天器的轨道-姿态-振动一体化模型是由轨道-姿态耦合动力学方
程和姿态-振动耦合动力学方程共同组成,大型航天器的轨道-姿态-振动一体化模型均可以通过线性化等方式转化为能控的状态空间模型,进而可以用于本发明的控制设计。
[0031]
步骤s2、基于所述状态空间模型确定轨道-姿态-振动一体化模型的控制器。
[0032]
在本技术实施例中,所述控制器u(t)具体如下式所示:
[0033]
u(t)=u(t,λ(um,t),d(τ),k,δk(t))
[0034]
式中,t为时间,λ(um,t)为输入饱和函数,um为输入力矩各分量的绝对值的最大值,d(τ)为输入时滞函数,k为所述控制器的增益矩阵,δk(t)为所述控制器的增益摄动,u为由时间t、输入饱和函数λ(um,t)、输入时滞函数d(τ)、控制器增益矩阵k和控制器的增益摄动δk(t)复合而成的复合函数。
[0035]
具体的,该控制器有效处理了控制器增益摄动、输入饱和以及输入时滞,可以在输入饱和的限制条件下,克服实际存在的输入时滞和不可避免的控制器增益摄动,实现大型航天器在轨装配时的姿态-轨道-振动一体化控制。
[0036]
步骤s3、根据所述大型航天器的运行状态确定多目标优化约束条件,并基于所述多目标优化约束条件求解所述控制器。
[0037]
在本技术实施例中,所述步骤s3中运行状态包括第一状态和第二状态,所述第一状态具体为所述大型航天器处于在轨装配时期或接受在轨服务状态,所述第二状态具体为所述大型航天器处于正常在轨运行且受到干扰失稳状态,所述第一状态对应的多目标优化约束条件为j1,所述第二状态对应的多目标优化约束条件为j2,所述多目标优化约束条件的表达式如下所示:
[0038][0039][0040]
其中,t0表示开始对大型航天器施加控制的时刻,为完成控制所需的时间,其中α》0,β》0,p》1,0《q《1为待优化的变量,为待选取的参数,其中i=1,2,3,4;j=1,2,且η(t)表示柔性航天器的模态位移向量,η
t
(t)为η(t)的转置,表示模态位移相对于时间的导数,为的转置,r
11
为大型航天器处于在轨装配时期或接受在轨服务状态时选取的决定振动能量消耗的权值矩阵,为柔性航天器的刚度矩阵,t表示时间,x(t)即为包含大型航天器轨道、姿态和模态在内的受控状态变量,x
t
(t)为x(t)的转置,u(t)为轨道-姿态-振动一体化控制器,u
t
(t)为u(t)的转置,r
12
为大型航天器处于在轨装配时期或接受在轨服务状态时选取的决定总能量消耗的权值矩阵,q1为大型航天器处于在轨装配时期或接受在轨服务状态时选取的决定系统稳定精度的权值矩阵,r
21
为大型航天器处于正常在轨运行且受到干扰失稳状态时
选取的决定振动能量消耗的权值矩阵,r
22
为大型航天器处于正常在轨运行且受到干扰失稳状态时选取的决定总能量消耗的权值矩阵。q2为大型航天器处于正常在轨运行且受到干扰失稳状态时选取的决定系统稳定精度的权值矩阵,d为微分运算符号。应当注意的是,上述形式只是多目标优化约束条件的一种形式。
[0041]
求解控制器的过程具体为:
[0042][0043]
其中,v(x(t))为对应于闭环系统的李雅普诺夫函数,为v(x(t))相对于时间的导数,v
p
(x(t))表示v(x(t))的p次方,vq(x(t))表示v(x(t))的q次方。
[0044]
步骤s4、将求解得到的控制器应用于所述轨道-姿态-振动一体化模型。
[0045]
求得的控制器u(t)可直接代入至所述的轨道-姿态-振动一体化控制的状态空间模型中,对在进行在轨装配的大型航天器进行轨道、姿态和振动的同时控制,同时u(t)满足输入饱和条件,而且可以克服输入时滞和控制器增益摄动。
[0046]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1