一种水下航行器搜寻定位与对接回取的装置及方法
1.本发明涉及定位对接领域,具体涉及无人机实现水下航行器的搜寻定位与对接回取。
背景技术:
2.随着人类对海洋资源的不断探索,与海洋开发相关的技术也取得了一定的突破,各种样式的无人水下航行器由此产生并得到发展,主要用以完成各种水下任务,已经在救援、科学考察、搜索等领域展现出自身优越性。随着人工智能技术的发展,无人航行器运用越来越广泛。受能源的影响,无人航行器在运行一段时间后需要进行充电,采集数据信息或者完成水面任务后将被回收上岸,这就涉及对接捞捕平台与无人航行器之间的对接引导技术。无人航行器领域中,航行器的对接、航行器中数据的处理、航行器动力的补充等都是重要的前提条件。在此发明中,实现无人航行器搜寻对接回收是关键性的过程和技术的核心。
3.目前常见的水下航行器回收装置为无人船和机械臂的搭配组合。无人船的体型较大,可配合机械臂,但无人船上装载的摄像机具有视觉盲区,且无人船运载不便,可行使的水域也有所限制,比如具有暗礁、狭窄通道等海上区域,不适合无人船的使用。针对目前无人航行器自主回收设备存在的结构复杂、环境适应性差、成本高等问题,研制一种高可达性且结构简单,自动化的搜寻与对接回取装置十分有必要。
技术实现要素:
4.本发明需要解决的技术问题是:克服现有技术的不足,提供一种水下航行器搜寻定位与对接回取的装置及方法。该装置及方法可以自主的进行水下航行器的搜寻定位并进行对接回取,实现高可达性,自动化程度高。
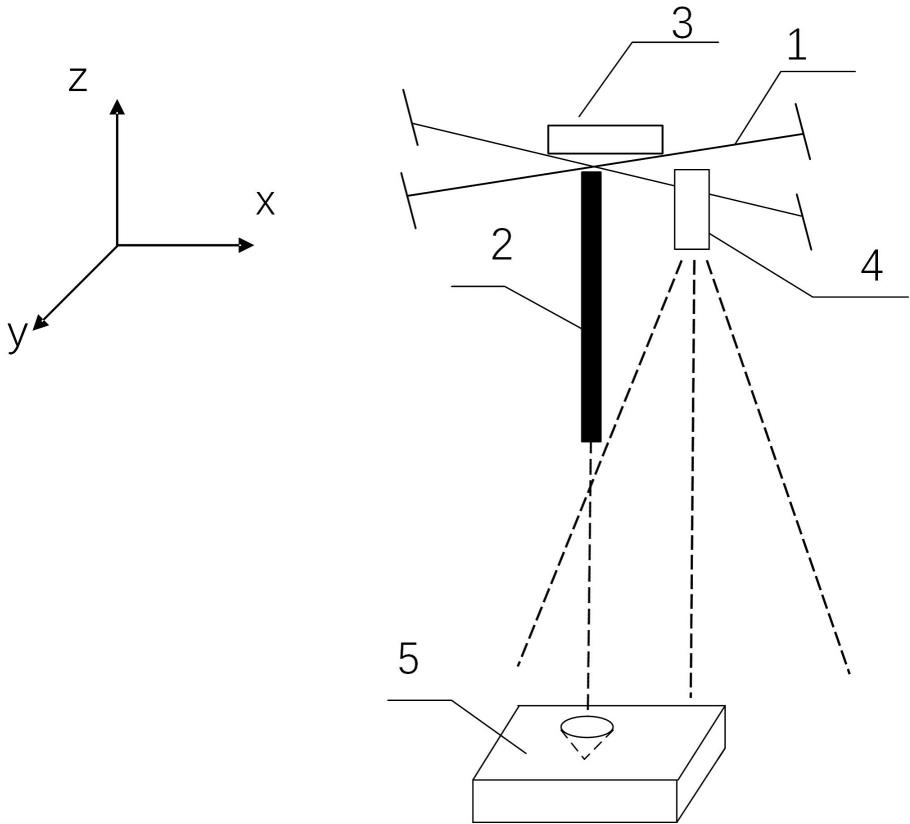
5.为达成所述目的,本发明提供一种水下航行器搜寻定位与对接回取装置,其特征在于,包括无人机(1)、对接挂杆(2)、嵌入式平台(3)、摄像机(4)、水下航行器(5)。其中,对接挂杆(2)、嵌入式平台(3),摄像机(4)与无人机(1)物理连接,对接挂杆(2)下端部设有圆锥形卡扣,对接挂杆(2)中心轴线与摄像机(4)光轴平行。嵌入式平台(3)与无人机(1)、摄像机(4)电连接;水下航行器(5)正上方设有一圆锥形凹槽对接口,凹槽底部可与对接挂杆(2)的圆锥形卡扣端对接并卡住。
6.优选的,对接挂杆(2)、嵌入式平台(3),摄像机(4)与无人机(1)物理连接能保证无人机(2)的正常飞行,且当对接挂杆(2)与水下航行器(5)锁住时也能正常飞行。
7.优选的,水下航行器(5)上方圆锥形凹糟底部设有弹簧卡扣,当对接挂杆(2)的圆锥形卡扣端触及凹槽底部时,弹簧卡扣自动弹出锁住对接挂杆(2)。
8.本发明还提供一种上述所述装置进行水下航行器搜寻定位与对接回取方法,其特征在于,包括以下步骤:s1:嵌入式平台(3)驱动无人机(1)飞行至水下航行器(5)的目标水域;s2:嵌入式平台(3)驱动摄像机(4)进行图像采集与图像处理实现水下航行器(5)
的搜寻定位;s3:嵌入式平台(3)驱动无人机(1)飞行至水下航行器(5)的上方;s4:嵌入式平台(3)驱动摄像机(4)进行图像采集与图像处理实现位于水下航行器(5)的上方的圆锥形凹槽的定位;s5:嵌入式平台(3)驱动无人机(1)调整位置,使对接挂杆(2)位于圆锥形凹槽的正上方;s6:嵌入式平台(3)驱动无人机(1)降低高度,将对接挂杆(2)插上圆锥形凹槽并锁住;s7:嵌入式平台(3)驱动无人机(1)离开水域完成回取。
9.优选的,所述步骤s2中的水下航行器(5)的搜寻定位,包括以下步骤:s21:摄像机(4)进行图像采集;s22:将图像送入轻量化的目标检测网络模块;s23:判断图像中是否存在目标物体水下航行器(5),若无,则无人机(1)平移一定距离,返回s21步骤,若有,进入步骤s24;s24:进行图像采集并计算目标物体水下航行器(5)中心点的图像坐标,并与图像中心点坐标进行对比,判断无人机(1)与目标物体水下航行器(5)在水平方向的偏移。
10.优选的,所述步骤s3中,完成判定的标准为摄像机(4)采集的图像中,水下航行器(5)完全位于图像中,且水下航行器的目标框所包含的像素数与整体图像的像素数之比高于1/2。
11.优选的,所述步骤s4中的水下航行器(5)的上方的圆锥形凹槽的定位,包括以下步骤:s41:摄像机(4)进行图像采集;s42:对图像进行预处理并进行圆锥形凹槽顶部的椭圆检测;s43:判断图像中检测到的椭圆其周长是否超过一定的阈值,若无,则无人机(1)下降一定距离,返回s41步骤,若有,进入步骤s44;s44:进行图像采集并计算圆锥形凹槽顶部的椭圆中心点的图像坐标,并与预先设置的图像中心点坐标进行对比,判断无人机(1)与水下航行器(5)上方圆锥形凹槽在水平方向的偏移。
12.优选的,所述步骤s43中椭圆周长的阈值为当对接挂杆(2)中心线与水下航行器(5)上方圆锥形凹槽中心线平行时,且对接挂杆(2)下端圆锥形卡扣最底部平面与水下航行器(5)上方圆锥形凹槽顶部平面相距一定距离时,摄像机(4)进行图像采集后获取的圆锥形凹槽椭圆检测后计算出的周长。
13.进一步的,所述步骤s44中预先设置的图像中心点坐标为当对接挂杆(2)中心线与水下航行器(5)上方圆锥形凹槽中心线重合时,且对接挂杆(2)下端圆锥形卡扣最底部平面与水下航行器(5)上方圆锥形凹槽顶部平面相距一定距离时,摄像机(4)进行图像采集后获取的图像中心点坐标。
14.总而言之,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下有益效果:1、本发明提供的水下航行器搜寻定位与对接回取装置,结构简单、可达性高;
2、本发明提供的水下航行器搜寻定位与对接回取方法,不需要人工操作,实现自动搜寻定位与对接回取。
附图说明
15.图1 无人机整体对接示意图。
16.图2 整体操作流程图。
17.图3 水下航行器的搜寻定位流程图。
18.图4 凹槽定位流程图。
19.图5 凹槽定位图像像素示意图。
20.图6 无人机水平偏移量计算流程图。
21.本发明中,(1)-无人机,(2)-对接杆,(3)-嵌入式平台,(4)-工业相机,(5)-水下航行器。
具体实施方式
22.下面结合本发明的附图1~6,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施。
23.在本发明的描述中,需要理解的是,术语“逆时针”、“顺时针”“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
24.如图1所示,一种水下航行器搜寻定位与对接回取装置,包括无人机(1)、对接挂杆(2)、嵌入式平台(3)、摄像机(4)、水下航行器(5)。其中,对接挂杆(2)、嵌入式平台(3),摄像机(4)与无人机(1)物理连接,对接挂杆(2)下端部设有圆锥形卡扣,对接挂杆(2)中心轴线与摄像机(4)光轴平行。嵌入式平台(3)与无人机(1)、摄像机(4)电连接;水下航行器(5)正上方设有一圆锥形凹槽对接口,凹槽底部设有弹簧卡扣,当对接挂杆(2)的圆锥形卡扣端触及凹槽底部时,弹簧卡扣自动弹出锁住对接挂杆(2)。所述对接挂杆(2)、嵌入式平台(3),摄像机(4)与无人机(1)物理连接能保证无人机(2)的平衡稳定正常飞行,且当对接挂杆(2)与水下航行器(5)锁住时也能平衡稳定正常飞行。
25.如图2所示,为一种水下航行器搜寻定位与对接回取方法总体流程,包括以下步骤:s1:嵌入式平台(3)驱动无人机(1)飞行至水下航行器(5)所在的目标水域;s2:嵌入式平台(3)驱动摄像机(4)进行图像采集与图像处理实现水下航行器(5)的搜寻定位;s3:当摄像机(4)采集的图像中,水下航行器(5)完全位于图像中,且水下航行器的目标框所包含的像素数与整体图像的像素数之比高于1/2,嵌入式平台(3)驱动无人机(1)飞行至水下航行器(5)的上方;
s4:嵌入式平台(3)驱动摄像机(4)进行图像采集与图像处理实现位于水下航行器(5)的上方的圆锥形凹槽的定位;s5:嵌入式平台(3)驱动无人机(1)调整位置,使对接挂杆(2)位于圆锥形凹槽的正上方;s6:嵌入式平台(3)驱动无人机(1)降低高度,将对接挂杆(2)插上圆锥形凹槽并锁住;s7:嵌入式平台(3)驱动无人机(1)离开水域完成回取。
26.如图3所示,为水下航行器(5)的搜寻定位流程,包括以下步骤:s21:摄像机(4)进行图像采集;s22:将图像送入预先训练好的轻量化的目标检测网络模块,提取图片中的特征;s23:判断图像中是否存在目标物体水下航行器(5),若无,则无人机(1)平移一定距离,返回s21步骤,若有,进入步骤s24;s24:进行图像采集并计算目标物体水下航行器(5)中心点的图像坐标,并与图像中心点坐标进行对比,判断无人机(1)与目标物体水下航行器(5)在水平方向的偏移,使无人机能飞行到目标物的上方。
27.水下航行器(5)上凹槽的定位与对接过程首先需要对对接挂杆(2)、摄像机(4)和水下航行器(5)上凹槽进行标定。当对接挂杆(2)中心线与水下航行器(5)上方圆锥形凹槽中心线平行时,且对接挂杆(2)下端圆锥形卡扣最底部平面与水下航行器(5)上方圆锥形凹槽顶部平面相距一定距离(0米至0.5米,本实施例取0.3米)时,摄像机(4)进行图像采集后获得圆锥形凹槽椭圆检测后计算出周长c。同时当对接挂杆(2)中心线与水下航行器(5)上方圆锥形凹槽中心线重合时,且对接挂杆(2)下端圆锥形卡扣最底部平面与水下航行器(5)上方圆锥形凹槽顶部平面相距一定距离(0米至0.5米,本实施例取0.3米)时,获取摄像机(4)进行图像采集后获取的图像中心点坐标(x0, y0)以及圆锥形凹槽椭圆检测中心点相对于图像中心点的距离b。周长c和距离b作为后续凹槽定位时的标准值。
28.如图4所示,为水下航行器(5)的上方的圆锥形凹槽的定位流程,包括以下步骤:s41:无人机(1)悬停于水下航行器(5)上方,摄像机(4)进行图像采集;s42:对图像进行预处理并进行圆锥形凹槽顶部的椭圆检测;s43:判断图像中检测到的椭圆其周长是否相比标定时的周长c超过一定的阈值,若无,则无人机(1)下降一定距离(本实施例取0.1米),返回s41步骤,若有,进入步骤s44;s44:进行图像采集并计算圆锥形凹槽顶部的椭圆中心点的图像坐标,并与预先设置的图像中心点坐标进行对比,判断无人机(1)与水下航行器(5)上方圆锥形凹槽在水平方向的偏移。
29.如图5所示,为水下航行器(5)的上方的圆锥形凹槽定位时的图像像素平面示意图,规定摄像机(4)采集的图像左上角为0坐标点,x,y值顺着坐标轴的方向增大,(x0,y0)为图像中心点坐标,(x1,y1)为圆锥形凹槽顶部的椭圆中心点的图像坐标,b为前述标定时圆锥形凹槽椭圆检测中心点相对于图像中心点的距离。
30.如图6所示为计算无人机水平位移量的流程图,根据图5给出的图像像素示意图,以图像的中心点坐标(x0,y0)作为参考点,获取圆锥形凹槽顶部的椭圆中心点的x轴图像坐标x1,计算x0与x1的距离差值,若x1》x0+r,则无人机右移,若x1《x0-r,则无人机左移,直到。
以同样的方式计算圆锥形凹槽顶部的椭圆中心点的y方向的坐标值y1,若y1》y0-b+r,则无人机后移,若y1《y0-b-r,则无人机前移,不断调整姿态,直到。此时无人机上的对接挂杆位于目标物圆锥形凹槽正上方,表明对接定位成功,驱动无人机垂直下降可完成对接。
31.以上所述仅是本发明的优选实施方式,应当理解所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1