一种生物实验温湿度控制生态环境盒控制方法与流程
1.本发明涉及温湿度控制方法领域,具体地讲,涉及一种生物实验温湿度控制生态环境盒控制方法。
背景技术:
2.生物实验是指在特定的环境条件下,运用一定的仪器、材料和药品,通过科学方法,有目的地观察研究一般情况下不易观察到的生物体结构和生命活动现象的过程。生物实验室需要保持温度及湿度。通过各项措施保证环境的温湿度在控制的范围内,并对环境温湿度进行监控和做好监控的记录,超过允许范围及时采取措施。
3.目前,对生物实验室的温湿度调整,主要依靠人工进行调整。人工调节时,不能保证做到实时调整。而且,无法便捷的实现模拟模拟黑夜白天以及远程监控生物情况。此为,现有技术的不足之处。
技术实现要素:
4.本发明要解决的技术问题是提供一种生物实验温湿度控制生态环境盒控制方法,方便生物实验温湿度控制。
5.本发明采用如下技术方案实现发明目的:
6.一种生物实验温湿度控制生态环境盒控制方法,其特征在于,包括以下步骤:步骤一:将气管分别通过软管连接加热器、制冷器及换气扇;
7.步骤二:取下塞子,将被实验对象放入盒体,塞上所述塞子;
8.步骤三:当所述盒体内湿度过低时,打开加湿器;
9.步骤四:当所述盒体内湿度过高时,打开加热器或换气扇,使热空气或空气进入所述盒体内,降低湿度;
10.步骤五:当所述盒体内温度不合适时,打开加热器、制冷器或换气扇,使热空气、冷空气或空气进入所述盒体内,实现温度调节;
11.步骤六:操作电动推杆,使挡板远离或遮挡灯板,并控制灯板的开关,实现模拟黑夜白天;
12.步骤七:操作电机,实现摄像头进入所述盒体,打开舵机,实现所述摄像头角度调整,方便观察所述盒体内被实验对象。
13.作为本技术方案的进一步限定,所述盒体固定连接所述气管,所述盒体固定连接所述加湿器,所述盒体固定连接轨道板,所述盒体固定连接方块,所述方块固定连接所述电动推杆,所述电动推杆的推杆端穿过所述方块,所述电动推杆的推杆端固定连接齿条,所述齿条接触所述轨道板,所述盒体固定连接轨道槽,所述盒体对应所述轨道槽设置有直槽,所述盒体固定连接安装板,所述安装板内固定连接所述灯板。
14.作为本技术方案的进一步限定,所述盒体轴承连接齿轮,所述齿轮啮合所述齿条,所述齿轮固定连接连杆一的一端,所述连杆一的另一端转动连接连杆二的一端,所述连杆
二的另一端转动连接方杆,所述方杆设置在所述轨道槽内,所述方杆固定连接竖杆,所述竖杆设置在所述直槽内,所述竖杆固定连接所述挡板,所述挡板匹配所述安装板。
15.作为本技术方案的进一步限定,操作所述电动推杆时,所述电动推杆带动所述齿条移动,所述齿条带动所述齿轮转动,所述齿轮带动所述连杆一摆动,所述连杆一带动所述连杆二摆动,所述连杆二带动所述方杆沿所述轨道槽移动,所述方杆带动所述竖杆沿所述直槽移动,所述竖杆带动所述挡板移动。
16.作为本技术方案的进一步限定,所述盒体固定连接所述电机,所述电机的输出轴固定连接螺杆,所述盒体固定连接圆杆,所述螺杆螺纹连接长板,所述圆杆穿过所述长板,所述长板固定连接壳体,所述壳体穿过所述盒体的底板,所述壳体内设置有所述舵机,所述长板固定连接所述舵机,所述舵机的输出轴固定连接圆柱,所述圆柱固定连接所述摄像头。
17.作为本技术方案的进一步限定,操作所述电机时,所述电机带动所述螺杆转动,所述螺杆带动所述长板沿所述圆杆移动,所述长板带动所述舵机、所述壳体、所述圆柱及所述摄像头移动。
18.作为本技术方案的进一步限定,所述壳体采用透明塑料或玻璃。
19.作为本技术方案的进一步限定,所述塞子固定连接方板,所述方板固定连接把手,所述塞子匹配所述盒体,所述塞子采用橡胶材料。
20.作为本技术方案的进一步限定,所述盒体内安装有温度传感器及湿度传感器。
21.作为本技术方案的进一步限定,所述盒体固定连接一组均匀分布的支撑腿。
22.与现有技术相比,本发明的优点和积极效果是:
23.1、本装置通过在盒体内设置温度传感器、湿度传感器,方便实现对温度及湿度精确测量,通过设置加湿器、加热器、制冷器及换气扇,方便实现对温度及湿度调整。
24.2、本装置通过控制器定时控制电动推杆及灯板,电动推杆伸缩时,在相关元件的带动下,实现挡板远离或遮挡灯板,方便实现模拟黑夜白天。
25.3、本装置通过设置电机、舵机及摄像头,在电机带动下,实现摄像头进入盒体,在舵机带动下,实现摄像头角度调整,方便实现对盒体内生物观察。
26.4、本方法通过巧妙地设计,实现对生物所处的盒体进行温度及湿度精确控制。
附图说明
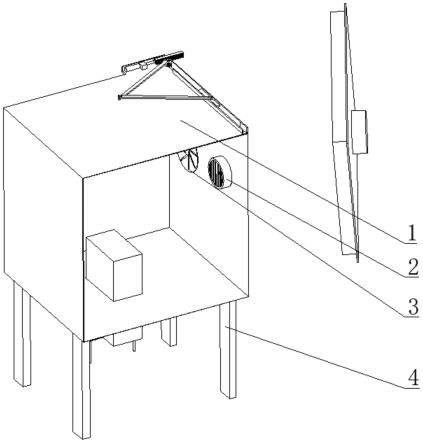
27.图1为本发明的立体结构示意图。
28.图2为本发明的局部立体结构示意图一。
29.图3为本发明的局部立体结构示意图二。
30.图4为本发明的局部立体结构示意图三。
31.图5为本发明的局部立体结构示意图四。
32.图6为本发明的局部立体结构示意图五。
33.图7为本发明的局部立体结构示意图六。
34.图8为本发明的局部立体结构示意图七。
35.图中:1、盒体,2、气管,3、加湿器,4、支撑腿,5、把手,6、方板,7、塞子,8、直槽,9、安装板,10、灯板,11、圆杆,12、螺杆,13、电机,14、壳体,15、摄像头,16、圆柱,17、舵机,18、长板,19、轨道板,20、电动推杆,21、方块,22、轨道槽,23、连杆一,24、齿条,25、齿轮,26、连杆
二,27、方杆,28、竖杆,29、挡板。
具体实施方式
36.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
37.如图1-图8所示,本发明包括以下步骤:
38.步骤一:将气管2分别通过软管连接加热器、制冷器及换气扇;
39.步骤二:取下塞子7,将被实验对象放入盒体1,塞上所述塞子7;
40.步骤三:当所述盒体1内湿度过低时,打开加湿器3;
41.步骤四:当所述盒体1内湿度过高时,打开加热器或换气扇,使热空气或空气进入所述盒体1内,降低湿度;
42.步骤五:当所述盒体1内温度不合适时,打开加热器、制冷器或换气扇,使热空气、冷空气或空气进入所述盒体1内,实现温度调节;
43.步骤六:操作电动推杆20,使挡板29远离或遮挡灯板10,并控制灯板10的开关,实现模拟黑夜白天;
44.步骤七:操作电机13,实现摄像头15进入所述盒体1,打开舵机17,实现所述摄像头15角度调整,方便观察所述盒体1内被实验对象。
45.所述盒体1固定连接所述气管2,所述盒体1固定连接所述加湿器3,所述盒体1固定连接轨道板19,所述盒体1固定连接方块21,所述方块21固定连接所述电动推杆20,所述电动推杆20的推杆端穿过所述方块21,所述电动推杆20的推杆端固定连接齿条24,所述齿条24接触所述轨道板19,所述盒体1固定连接轨道槽22,所述盒体1对应所述轨道槽22设置有直槽8,所述盒体1固定连接安装板9,所述安装板9内固定连接所述灯板10。
46.所述盒体1轴承连接齿轮25,所述齿轮25啮合所述齿条24,所述齿轮25固定连接连杆一23的一端,所述连杆一23的另一端转动连接连杆二26的一端,所述连杆二26的另一端转动连接方杆27,所述方杆27设置在所述轨道槽22内,所述方杆27固定连接竖杆28,所述竖杆28设置在所述直槽8内,所述竖杆28固定连接所述挡板29,所述挡板29匹配所述安装板10。
47.操作所述电动推杆20时,所述电动推杆20带动所述齿条24移动,所述齿条24带动所述齿轮25转动,所述齿轮25带动所述连杆一23摆动,所述连杆一23带动所述连杆二26摆动,所述连杆二26带动所述方杆27沿所述轨道槽22移动,所述方杆27带动所述竖杆28沿所述直槽8移动,所述竖杆28带动所述挡板20移动。
48.所述盒体1固定连接所述电机13,所述电机13的输出轴固定连接螺杆12,所述盒体1固定连接圆杆11,所述螺杆12螺纹连接长板18,所述圆杆11穿过所述长板18,所述长板18固定连接壳体14,所述壳体14穿过所述盒体1的底板,所述壳体14内设置有所述舵机17,所述长板18固定连接所述舵机17,所述舵机17的输出轴固定连接圆柱16,所述圆柱16固定连接所述摄像头15。
49.操作所述电机13时,所述电机13带动所述螺杆12转动,所述螺杆12带动所述长板18沿所述圆杆11移动,所述长板18带动所述舵机17、所述壳体14、所述圆柱16及所述摄像头15移动。
50.所述壳体14采用透明塑料或玻璃。
51.所述塞子7固定连接方板6,所述方板6固定连接把手5,所述塞子7匹配所述盒体1,所述塞子7采用橡胶材料。
52.所述盒体1内安装有温度传感器及湿度传感器。
53.所述盒体1固定连接一组均匀分布的支撑腿4。
54.所述加湿器3、所述灯板10、所述摄像头15、所述电机13、所述舵机17及所述电动推杆20分别电性连接控制器。
55.温度传感器、湿度传感器、加热器、制冷器及换气扇分别电性连接控制器。
56.本发明的工作流程为:对控制器进行调试,使其控制加湿器3、灯板10、电机13、舵机17、电动推杆20、加热器、制冷器及换气扇。
57.将气管2分别通过软管连接加热器、制冷器及换气扇。
58.取下塞子7,将被实验对象放入盒体1,塞上塞子7。
59.当盒体1内湿度过低时,控制器打开加湿器3。
60.当盒体1内湿度过高时,控制器打开加热器或换气扇,使热空气或空气进入盒体1内,降低湿度。
61.当盒体1内温度不合适时,控制器打开加热器、制冷器或换气扇,使热空气、冷空气或空气进入盒体1内,实现温度调节。
62.控制器定时操作电动推杆20,电动推杆20带动齿条24移动,齿条24带动齿轮25转动,齿轮25带动连杆一23摆动,连杆一23带动连杆二26摆动,连杆二26带动方杆27沿轨道槽22移动,方杆27带动竖杆28沿直槽8移动,竖杆28带动挡板20移动。使挡板29远离或遮挡灯板10,控制器同时控制灯板10的开关,实现模拟黑夜白天。
63.控制器定时操作电机13,操作电机13时,电机13带动螺杆12转动,螺杆12带动长板18沿圆杆11移动,长板18带动舵机17、壳体14、圆柱16及摄像头15移动。实现摄像头15进入盒体1,控制器定时打开舵机17,实现摄像头15角度调整,方便观察盒体1内被实验对象。
64.本装置通过在盒体1内设置温度传感器、湿度传感器,方便实现对温度及湿度精确测量,通过设置加湿器3、加热器、制冷器及换气扇,方便实现对温度及湿度调整。
65.本装置通过控制器定时控制电动推杆20及灯板10,电动推杆20伸缩时,在相关元件的带动下,实现挡板29远离或遮挡灯板10,方便实现模拟黑夜白天。
66.本装置通过设置电机13、舵机17及摄像头15,在电机13带动下,实现摄像头15进入盒体1,在舵机17带动下,实现摄像头15角度调整,方便实现对盒体1内生物观察。
67.本方法通过巧妙地设计,实现对生物所处的盒体进行温度及湿度精确控制。
68.以上公开的仅为本发明的具体实施例,但是,本发明并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1