用于车辆远程召唤系统的安全节能运动规划方法及系统与流程
1.本发明属于车辆远程召唤系统技术领域,具体涉及一种用于车辆远程召唤系统的安全节能运动规划方法及系统。
背景技术:
2.智能化是汽车行业转型的必经之路,自动驾驶技术是目前车辆智能化重点发展的方向之一。远程召唤功能作为自动驾驶技术商业化的场景之一,近年来备受国际各大企业关注。车辆远程召唤属于自动驾驶领域的范畴,该功能在开放道路环境下,允许车主可以在一定范围内,通过手机客户端操作,将车辆召唤到车主当前位置或者指定位置。车辆远程召唤功能在一定程度上极大地方便了用户对车辆的使用,市场上该项技术的代表是特斯拉,然而车辆在响应召唤功能时屡次出现安全事故,导致消费用户对该项自动驾驶技术的信任度大幅度降低。
3.自动驾驶系统是一个软硬件结合的强耦合系统,运动规划方案决定了车辆的行驶方向、行驶速度与自主决策,直接影响着车辆行驶的安全性与高效性。因此,对运动规划方案进行精确合理设计对车辆召唤功能的实现显得尤为重要。运动规划是指在一定约束条件下,完成某个区域或范围内时间、空间状态下的路径、速度优化或称之为车辆在一定时间、空间内的行驶轨迹优化。若采用路径-速度分解法,具体可分为两个部分,即路径规划与速度规划。目前的路径规划方法主要分为基于采样的路径规划算法和基于地图的路径搜索算法两大类,基于采样的路径规划算法比较常见的有概率图算法(probabilistic road map,prm)和快速探索随机树(rapidly-exploring random tree,rrt),如专利文献cn105487537b公布的一种车辆运动规划方法,该方法将rrt算法用于车辆运动规划,将实际路径转换为概率表示,并应用于路径规划方法中,以及根据车辆的状态信息计算转换到对应栅格的概率,让运动规划模块充分利用这些经验知识,提高了搜索效率。但由于受采样点的限制,路径具有一定的不确定性,且随着采样点的增加,搜索时间会大幅上升,且该方法并未考虑车辆运动过程中的能耗问题。
4.另外,基于地图的搜索算法常见的有深度优先(depth-first search,ofs)算法、广度优先搜索(breadth-first search,bfs)算法、迭代加深搜索(iterative-deepening search,ids)算法、等代价搜索(uniform-cost search,ucs)算法和启发式搜索(heuristic search,hs)算法等。这类算法当节点数目比较多时,算法搜索速度慢、效率低。启发式搜索算法在决定节点扩展顺序的估价函数中引入了启发值,即当前节点状态到目标状态之间的估计消耗,从而引导搜索朝向目标状态的方向,避免了盲目搜索,有助于提高算法的搜索效率,因而启发式搜索算法被广泛采用。而启发式搜索算法具有代表性的是a-star算法,基于a-star的搜索方法在一定栅格精度下能够保证完备性,同时a-star在启发式函数可采纳时得到的解为最优解。然而当地图栅格达到一定数量时,a-star算法并不能满足实时性规划需求。
5.目前应用的速度规划方法大多以规则和优化方法为主,主要考虑车辆的安全性,
较少考虑车辆的能量消耗问题,或是单一的考虑安全性或动力部件的消耗,如专利文献cn111273655a公开的推进高效的自主驾驶策略,该策略只是单纯考虑了车辆运动过程中动力部件的能耗问题,会造成车辆虽有能耗下降却无法保证安全性。
6.因此,有必要开发一种新的用于车辆远程召唤系统的安全节能运动规划方法及系统。
技术实现要素:
7.本发明提供一种用于车辆远程召唤系统的安全节能运动规划方法及系统,能解决在无高精度地图的场景下,车辆远程召唤系统响应过程中的安全性低、无能耗优化的问题。
8.第一方面,本发明所述的一种用于车辆远程召唤系统的安全节能运动规划方法,包括以下步骤:
9.获取当前车辆和用户的位置信息,以及车辆感知系统输出的静态障碍物信息,以车辆的当前位置为起点,用户位置为终点,根据静态障碍物信息进行低频参考路径规划;
10.根据低频参考路径信息和车辆感知系统获取的动态障碍物信息进行高频局部路径规划;
11.根据输入的高频局部路径信息、车辆距离障碍物的距离以及预设的速度边界进行速度规划。
12.可选地,所述低频参考路径规划具体为:
13.s11:确定低频参考路径规划的规划频率:根据车辆感知系统的感知范围,确定低频参考路径规划的规划频率f
p
;
14.s12:建立实时记忆的全局栅格二值地图,将静态障碍物信息以规划频率f
p
传输到低频参考路径规划模块,进行实时更新地图;
15.s13:建立open容器和close容器,其中,open容器用于保存可行子节点,close容器用于保存子节点对应的父节点,并先将起点对应的节点放入close容器;
16.s14:根据最新放入close容器中的节点与终点对应的节点,求解reedsshepp曲线,并进行障碍物碰撞检测,若有碰撞,则进入步骤s15,若无碰撞,则得到最终路径;
17.s15:以最新放入close容器中的节点为父节点,对车辆转向角进行离散,根据轨迹长度与动力学模型确定可行子节点;
18.s16:将s15中的各个可行节点生成的轨迹进行碰撞检测,若存在碰撞,则删除该子节点,若无碰撞,将该子节点并储存在open容器中,并更新对应的父节点到每个可行子节点的成本;
19.s17:通过车辆转向、倒退、方向切换的综合成本,筛选出成本最小的可行节点,并放入close容器中;判断终点对应的节点是否放入open容器中,若终点对应的节点已经在open容器中,则得到无碰撞的低频参考路径,否则重复s14,直至输出无碰撞的低频参考路径。
20.可选地,所述高频局部路径规划具体为:
21.s21:根据实时性要求确定高频局部路径规划的规划频率;
22.s22:以低频参考路径规划出的路径信息为基础,根据车辆感知系统的检测边界,确定高频局部路径规划的前后左右边界;
23.s23:根据设定的车身左右搜索边界,进行横向距离离散;
24.s24:根据车辆的当前位置、车辆前后边界、离散的横向距离,生成局部路径;
25.s25:删除不满足车辆运动约束、碰撞约束的路径束,选择距离参考路径距离最短的路径作为最终的局部路径。
26.可选地,所述速度规划具体为:
27.s31:设定速度边界[v
min
,v
max
];
[0028]
s32:依据车速边界进行速度离散,获得当前时刻的车速候选va=[v
min
:δv:v
max
],根据以下公式计算出功率流候选pd:
[0029][0030]
其中mv为整车质量,g为重力加速度,f和cd分别为滚动阻力系数和空气阻力系数,a为迎风面积,ρ
air
为空气密度,va为当前时刻的车速候选集合,δ为旋转质量换算系数,θ为当前坡度角(在可根据车辆俯仰角推算),δv为速度离散精度;
[0031]
s33:根据步骤s17输出的低频参考路径计算路径距离d
ref
,结合车速候选va=[v
min
:δv:v
max
],获得预估时间集合根据以下公式计算出预估能耗energy:energy=pdt;
[0032]
s34:确定综合优化函数,综合优化函数如下:
[0033][0034]
其中:d
obst
为车辆距离障碍物的距离,ω1为碰撞成本权重,ω2为能耗成本权重,emax为当前时刻最大预估能耗;
[0035]
s35:根据最大加速度、最大减速度、安全边界的约束求解综合优化函数,确定使得综合优化函数最小的车速候选,即获得当前时刻的最优车速。
[0036]
可选地,所述步骤s11中,规划频率f
p
的计算公式如下:
[0037]fp
=ve/d
per
[0038]
式中,ve为预估平均车速;d
per
为车辆的感知距离。
[0039]
可选地,所述步骤s12中,建立实时记忆的全局栅格二值地图,具体为:
[0040]
根据起点信息和终点信息确定地图边界,并依据边界进行栅格离散,将车辆感知系统检测到的静态障碍物信息映射到二值栅格地图中。
[0041]
可选地,所述步骤s12中,栅格离散精度≤0.05m。
[0042]
可选地,所述步骤s14中,障碍物碰撞检测具体为:
[0043]
逐次将reedsshepp曲线上离散点对应的车辆边界,投影至步骤s12中建立的全局栅格二值地图中,若存在对应的栅格值为1的情况,则说明有碰撞,进行步骤s15,若不存在对应的栅格值为1,则得到最终路径。
[0044]
可选地,所述步骤s24中,生成局部路径采用的生成方法为直线/圆弧构造、多项式螺旋线、样条曲线、bezier曲线中的任一。
[0045]
第二方面,本发明所述的一种用于车辆远程召唤系统的安全节能运动规划系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时能执行如本发明所述的用于车辆远程召唤系统的安全节能运动规划方法的步骤。
[0046]
本发明具有以下优点:本发明中的路径规划方法包括低频参考路径规划与高频局部路径规划,能够满足优化性与实时性的规划要求;速度规划方法从整车层面出发,通过综合考虑车辆行驶过程中的安全问题与能耗问题,解决了远程召唤过程中无法同时满足安全性与高效性的运动规划问题。本发明在现有硬件条件下仅需调整软件方案即可实现,具有成本低、安全性高、能耗低、实用性强的特点。
附图说明
[0047]
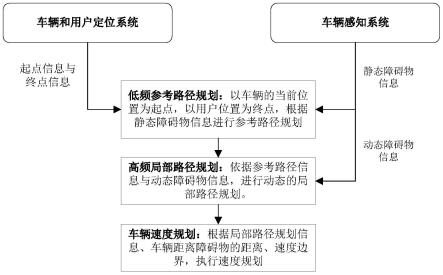
图1为本实施例的流程图;
[0048]
图2为本实施例中低频参考路径规划的流程图;
[0049]
图3为本实施例中高频局部路径规划的流程图;
[0050]
图4为本实施例中速度规划的流程图。
具体实施方式
[0051]
下面结合附图对本发明作进一步说明。
[0052]
如图1所示,本实施例中,一种用于车辆远程召唤系统的安全节能运动规划方法,包括以下步骤:
[0053]
获取当前车辆(通过车辆的定位系统进行定位)和用户的位置信息(根据用户定位系统进行定位),以及车辆感知系统输出的静态障碍物信息,以车辆的当前位置为起点,用户位置为终点,根据静态障碍物信息进行低频参考路径规划;
[0054]
根据低频参考路径信息和车辆感知系统获取的动态障碍物信息进行高频局部路径规划;
[0055]
根据输入的高频局部路径信息、车辆距离障碍物的距离以及预设的速度边界进行速度规划。
[0056]
以下对各个步骤进行详细的说明:
[0057]
(1)低频参考路径规划:
[0058]
低频参考路径规划的目的是在一定时间周期(一般大于传统实时路径规划的周期)内为下游提供参考路径,由于不要求实时响应,从而为控制器提供足够的计算时间,具体实施方式如图2所示。
[0059]
s11:确定低频参考路径规划的规划频率:根据车辆感知系统的感知范围,根据以下方式确定低频参考路径规划的规划频率f
p
:
[0060]fp
=ve/d
per
[0061]
式中,ve为预估平均车速;d
per
为车辆的感知距离。
[0062]
s12:建立实时记忆的全局栅格二值地图:根据起点信息和终点信息确定地图边界,并依据边界进行栅格离散,将车辆感知系统检测到的静态障碍物信息映射到二值栅格地图中,为保证记录的静态障碍物位置信息精确,栅格离散精度≤0.05m。静态障碍物置信度大于阈值,将映射栅格置位1,障碍物置信度小于阈值,将映射栅格置位0。将静态障碍物信息以步骤s11获得的规划频率f
p
传输到低频参考路径规划模块,进行实时更新地图。
[0063]
s13:建立open容器和close容器:open容器用来保存可行子节点,close容器用来保存子节点对应的父节点,并先将起点对应的节点放入close容器。
[0064]
s14:根据最新放入close容器中的节点与终点对应的节点,求解reedsshepp曲线,并进行障碍物碰撞检测,即逐次将reedsshepp曲线上离散点对应的车辆边界,投影至步骤s12中建立的全局栅格二值地图中,若存在对应的栅格值为1的情况,说明有碰撞,则进行s15,若不存在对应的栅格值为1的情况,则直接得到路径。
[0065]
s15:以最新放入close容器中的节点为父节点,根据车辆最小转向半径对转向角进行离散,离散数量视控制器性能而定,根据轨迹长度与动力学模型确定可行子节点。
[0066]
s16:将s15中各个可行节点生成的轨迹进行碰撞检测,若存在碰撞,则删除该子节点,若无碰撞,将该子节点并储存在open容器中,并更新对应的父节点到每个可行子节点的成本。
[0067]
s17:通过考虑车辆转向、倒退、方向切换等综合成本,筛选出成本最小的可行节点,放入close容器中。判断终点对应的节点是否放入open容器中,若终点对应的节点已经在open容器中,则得到无碰撞的低频参考路径,否则重复s14,直至输出低频参考路径。
[0068]
(2)高频局部路径规划
[0069]
高频局部路径规划的功能是使车辆躲避动态障碍物,如行人、行驶的车辆等。具体实施方式如图3所示。
[0070]
s21:确定高频局部路径规划的规划频率:根据实时性要求进行设定,推荐范围为20~50hz。
[0071]
s22:设定搜索边界:以低频参考路径规划模块输出的路径信息为基础,根据车辆感知系统的检测边界,确定高频局部路径规划的前后左右边界。
[0072]
s23:横向距离离散:根据设定的车身左右搜索边界,进行横向距离离散,推荐离散精度为0.2~0.5m。
[0073]
s24:生成局部路径簇:根据车辆的当前位置、车辆前后边界、离散的横向距离,生成局部路径,生成方法不限于:直线/圆弧构造、多项式螺旋线、样条曲线、bezier曲线等。
[0074]
s25:删除不满足条件的路径:删除不满足车辆运动约束、碰撞约束的路径束,选择距离参考路径距离最短的路径作为最终的局部路径。
[0075]
(3)速度规划
[0076]
由于车辆惯性的存在,行驶速度不能实现阶跃变化,速度规划的功能是为车辆提供满足加速度、安全、能耗约束的速度轨迹。具体实施方式如4所示。
[0077]
s31:设定速度边界[v
min
,v
max
]:车辆在远程召唤响应过程中,会遇到障碍物出现突然刹停的情况,最低速度边界设定为0,考虑到车辆零部件的响应速度、感知系统延迟、横向控制延迟、突发安全问题等情况,速度最高边界推荐设定为10~20km/h。
[0078]
s32:计算整车功率流候选:依据车速边界进行速度离散,获得当前时刻的车速候选va=[v
min
:δv:v
max
],根据以下公式获得功率流候选pd:
[0079][0080]
其中:mv为整车质量,g为重力加速度,f和cd分别为滚动阻力系数和空气阻力系数,a为迎风面积,ρ
air
为空气密度,va为当前时刻的车速候选集合,δ为旋转质量换算系数,θ为当前坡度角,δv为速度离散精度。
[0081]
值得注意的是,车速为零时,车辆在启动时,由于动力附件、车机等部件的工作,功
率流并不为零,该功率流的值可根据车况进行预估。
[0082]
s33:计算预估能耗:根据步骤s17输出的低频参考路径计算路径距离d
ref
,结合车速候选va=[v
min
,δv,v
max
],获得预估时间集合则预估能耗为energy=pdt。
[0083]
s34:确定综合优化函数,为了综合考虑车辆安全性与能量消耗,综合优化函数如下:
[0084][0085]
其中:d
obst
为车辆距离障碍物的距离,ω1为碰撞成本权重,ω2为能耗成本权重,emax为当前时刻最大预估能耗。
[0086]
s35:根据最大加速度、最大减速度、安全边界的约束求解综合优化函数,确定使得综合优化函数最小的车速候选,即获得当前时刻的最优车速。
[0087]
本实施例中,一种用于车辆远程召唤系统的安全节能运动规划系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时能执行如本实施例中所述的用于车辆远程召唤系统的安全节能运动规划方法的步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1