多路信号同步采样电路的制作方法
1.本发明涉及电力测量技术领域,尤其涉及一种多路信号同步采样电路。
背景技术:
2.目前,在电力测量领域中,机器设备关节例如机器人的关节动力学性能测试中,在精确获取机器人关节的输入、输出力矩信息及位置信息外,还需要保证机器人关节的输入、输出力矩信息及位置信息在时间上的同步。
3.相关技术中,力矩信息一般通过ad采样并发送给主机,位置信息一般通过编码器测量并发送给主机,但这种测量电路难以保障机器人关节的力矩信息及位置信息测量的同步性。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种多路信号同步采样电路,保证了对机器设备关节的力矩信号和编码器信号的同步采样。
5.根据本发明实施例的多路信号同步采样电路,其包括:
6.fpga主控模块,用于同步获取力矩信号和编码器信号,并将所述力矩信号和所述编码器信号输出;
7.usb转串口模块,所述fpga主控模块用于通过所述usb转串口模块与上位机连接,所述usb转串口模块用于接收所述力矩信号和所述编码器信号并响应输出总串口信号给所述上位机,以及接收来自所述上位机根据所述总串口信号发送的控制信号,其中,所述控制信号用于控制机器设备关节的输入力矩数据与输入角度数据。
8.根据本发明实施例的多路信号同步采样电路,至少具有如下有益效果:本发明中通过fpga主控模块控制力矩信号和编码器信号的同步采样,再将采集到的控制力矩信号和编码器信号传递给usb转串口模块;usb转串口模块接收来自fpga主控模块的力矩信号和编码器信号,并将力矩信号和编码器信号整合在一起生成总串口信号并将总串口信号发送给上位机;上位机根据总串口信号生成控制信号,并将控制信号发送给usb转串口模块,以控制机器设备关节的输入力矩数据与输入角度数据。通过fpga主控模块实现对力矩信号和编码器信号的同步采样,力矩信号和编码器信号通过usb转串口模块整合在一起生成总串口信号发送给上位机。这种多路信号同步采样电路,保证了对机器设备关节的力矩信号和编码器信号的同步采样,也可以更好的控制机器设备关节的输入力矩数据与输入角度数据。
9.根据本发明的一些实施例,所述多路信号同步采样电路还包括力矩采样模块,所述力矩采样模块与所述fpga主控模块连接,所述力矩采样模块用于获取所述机器设备关节的输入力矩数据和输出力矩数据以生成力矩信号,并将所述力矩信号输出给所述fpga主控模块。
10.根据本发明的一些实施例,所述多路信号同步采样电路还包括力矩传感器模块,所述力矩采样模块与所述力矩传感器模块连接,所述力矩传感器模块包括第一力矩传感器
和第二力矩传感器,所述第一力矩传感器用于采集所述机器设备关节的输入力矩数据并将所述输入力矩数据输出给所述力矩采样模块,所述第二力矩传感器用于采集所述机器设备关节的输出力矩数据并将所述输出力矩数据输出给所述力矩采样模块。
11.根据本发明的一些实施例,所述多路信号同步采样电路还包括编码器模块,所述编码器信号包括第一编码器信号和第二编码器信号,所述编码器模块包括第一编码器和第二编码器,所述fpga主控模块分别与所述第一编码器和所述第二编码器连接,所述第一编码器用于采集所述机器设备关节的输入角度数据并根据所述输入角度数据生成第一编码器信号,且将所述第一编码器信号输出给所述fpga主控模块;所述第二编码器用于采集所述机器设备关节的输出角度数据并根据所述输出角度数据生成第二编码器信号,且将所述第二编码器信号输出给所述fpga主控模块。
12.根据本发明的一些实施例,所述编码器模块通过双路biss-c协议将所述编码器信号输出给所述fpga主控模块。
13.根据本发明的一些实施例,所述usb转串口模块包括第一usb转串口电路、第二usb转串口电路和第三usb转串口电路,所述第一usb转串口电路、所述第二usb转串口电路与所述fpga主控模块连接,所述第三usb转串口电路用于与所述上位机连接,所述第一usb转串口电路用于接收来自所述fpga主控模块的力矩信号,所述第二usb转串口电路用于接收来自所述fpga主控模块的编码器信号,所述第三usb转串口电路还用于接收来自所述上位机的控制信号。
14.根据本发明的一些实施例,所述usb转串口模块还包括升压电路,所述升压电路与所述第三usb转串口电路连接,其中,
15.所述升压电路为3.3v转6v的dc/dc升压电路。
16.根据本发明的一些实施例,所述fpga主控模块包括主控电路和fpga-ad接口电路,所述主控电路与所述fpga-ad接口电路连接,所述fpga-ad接口电路与所述力矩采样模块连接。
17.根据本发明的一些实施例,所述多路信号同步采样电路还包括电源模块,所述电源模块与所述fpga主控模块连接,所述电源模块用于为所述fpga主控模块供电。
18.根据本发明的一些实施例,所述电源模块包括第一降压电路和第二降压电路,所述第一降压电路与所述第二降压电路连接,其中,
19.所述第一降压电路为24v转5v的dc/dc降压电路;
20.所述第二降压电路为5v转3.3v的dc/dc降压电路。
21.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
22.附图用来提供对本发明技术方案的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明的技术方案,并不构成对发明技术方案的限制。
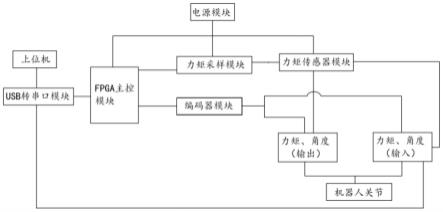
23.图1是本发明实施例提供的多路信号同步采样电路的结构示意图;
24.图2是本发明实施例提供的多路信号同步采样电路的具体结构示意图;
25.图3是本发明实施例提供的主控电路图;
26.图4是本发明实施例提供的fpga-ad接口电路图;
27.图5是本发明实施例提供的usb转串口模块的部分电路图;
28.图6是本发明实施例提供的usb转串口的具体电路图;
29.图7是本发明实施例提供的usb与主控模块的电路连接图;
30.图8是本发明实施例提供的升压电路图;
31.图9是本发明实施例提供的第一降压电路图;
32.图10是本发明实施例提供的第二降压电路图;
33.图11是本发明实施例提供的力矩采样模块的部分电路图;
34.图12是本发明实施例提供的编码器模块的电路图;
35.图13是本发明实施例提供的力矩传感器模块的电路图。
具体实施方式
36.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
37.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
38.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接或活动连接,也可以是可拆卸连接或不可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通、间接连通或两个元件的相互作用关系。
39.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,对于本领域的普通技术人员而言,可以具体情况理解上述术语在发明中的具体含义。
40.目前,在电力测量领域中,机器设备关节例如机器人的关节动力学性能测试中,在精确获取机器人关节的输入、输出力矩信息及位置信息外,还需要保证机器人关节的输入、输出力矩信息及位置信息在时间上的同步。
41.相关技术中,力矩信息一般通过ad采样并发送给主机,位置信息一般通过编码器测量并发送给主机,但这种测量电路难以保障机器人关节的力矩信息及位置信息测量的同步性。
42.基于此,本发明实施例提供了一种多路信号同步采样电路,保证了对机器设备关节的力矩信号和编码器信号的同步采样。
43.下面参考图1至图13描述根据本发明实施例的多路信号同步采样电路100。
44.参照图1至图8,多路信号同步采样电路包括:fpga主控模块和usb转串口模块,fpga主控模块用于同步获取力矩信号和编码器信号,并将力矩信号和编码器信号输出;fpga主控模块用于通过usb转串口模块与上位机连接,usb转串口模块用于接收力矩信号和
编码器信号并响应输出总串口信号给上位机,以及接收来自上位机根据总串口信号发送的控制信号,其中,控制信号用于控制机器设备关节的输入力矩数据与输入角度数据。
45.本发明中通过fpga主控模块控制力矩信号和编码器信号的同步采样,再将采集到的控制力矩信号和编码器信号传递给usb转串口模块;usb转串口模块接收来自fpga主控模块的力矩信号和编码器信号,并将力矩信号和编码器信号整合在一起生成总串口信号并将总串口信号发送给上位机;usb转串口模块用于接收力矩信号和编码器信号并响应输出总串口信号给上位机,以及接收来自上位机根据总串口信号发送的控制信号,控制信号用于控制机器设备关节的输入力矩数据与输入角度数据。通过fpga主控模块实现对力矩信号和编码器信号的同步采样,力矩信号和编码器信号通过usb转串口模块整合在一起生成总串口信号发送给上位机。这种多路信号同步采样电路,保证了对机器设备关节的力矩信号和编码器信号的同步采样,也可以更好的控制机器设备关节的输入力矩数据与输入角度数据。
46.在本实施例中,usb转串口模块为usb转uart模块,其中,usb是英文universal serial bus的缩写,译为通用串行总线;uart是英文universal asynchronous receiver/transmitter的缩写,译为通用异步收发传输器。fpga主控模块中,fpga是英文field programmable gate array的缩写,译为现场可编程门阵列。
47.需要说明的是,参照图4和图5,fpga主控模块通过fpga编程控制力矩信号、编码器信号的同步采样、记录采样的时间再将采集到的信号传递给usb转串口模块。为了防止fpga主控模块与电源的互相干扰,fpga主控模块的5v电源口并联c28-c31四个电容。fpga主控模块中的busy经排针u14接ad芯片的busy管脚,用于指示ad芯片的状态、convst与ad芯片的convst_a、convst_b同时连接,用于接收ad芯片采样到的力矩数据。cs接ad芯片的片选信号口cs。biss1_rx和biss1_tx接收来自编码器模块经芯片u1解码后的编码器信号,biss2_rx和biss2_tx的biss1_rx\biss1_tx接收来自编码器模块经芯片u1解码后的编码器信号。rd/sclk接入ad的rd/sclk端口,为ad芯片的串行数据传输提供时钟信号。uart1_rx、uart1_tx、uart2_rx、uart2_tx分别与图3的串口芯片的u6.2、u6.3的相关端口连接、将fpga主控模块中的力矩信号和编码器信号传给usb转串口芯片。其中,力矩数据包括输入力矩数据和输出力矩数据,ad芯片为力矩采样模块。
48.需要说明的是,参照图5至图8,usb转串口模块使用的是usb转串口芯片,以实现1路usb转3路串口的功能,1路串口u6.2即第一usb转串口电路用于接收来自fpga主控模块的力矩信号,u6.3即第二usb转串口电路用于接收来自fpga主控模块的编码器信号,u6.4即第三usb转串口电路还用于接收来自上位机的机器设备关节的控制信号。
49.需要说明的是,参照图5至图8,usb转串口模块中,2路3.3v电源分别经过l7、l5电感,并联的c59、c61以及c58、c60接地滤波后接入usb转串口芯片的vpll、vphy;usb转串口芯片的3个vcore连接在一起后再经过3个并联的电容c67、c68、c69接地;3.3v电源经过接地电容c4滤波后接入芯片vregin管脚,vregout输出1.8v电源经接地电容c7滤波后接入usb转串口芯片vcore,复位管脚rreset串接一个电阻r16后接3.3v电源,ref管脚串联电阻r15后接地。usbdm、usbdp管脚分别接usb口的ud+、ud-引脚。usb转串口芯片的3个vccio管脚连接在一起后接3.3v电源,电容c62、c63、c64、c65、c69并联后一端接vccio、一端接地,usb转串口芯片的管脚eecs、eeclk、eedata分别与e2prom芯片(用于保存usb端口的配置信息)的cs、
clk、di管脚连接,同时eedata管脚串连电阻r35后再与do连接,eeprom芯片的cs、clk、do管脚接分别接r33、r34、r24上拉电阻后与3.3v电源连接,xtin、xtout接12mhz晶振。u6.4(第三usb转串口电路)的管脚db0txd、db0rxd、db7ri经rs485转换芯片u3后实现usb转rs485通讯,实现上位机与机器设备关节的modbus-rtu/rs485通讯的物理层。usb2的vcc管脚接5v电源,同时vcc管脚串接电阻r2后接地,usb2的其余管脚直接接地。
50.在本实施例中,机器设备为机器人,即多路信号同步采样电路,保证了对机器人关节的力矩信号和编码器信号的同步采样,也可以更好的控制机器人关节的输入力矩数据与输入角度数据。
51.可以理解的是,参照图11,多路信号同步采样电路还包括力矩采样模块,力矩采样模块与fpga主控模块连接,力矩采样模块用于获取机器设备关节的输入力矩数据和输出力矩数据以生成力矩信号,并将力矩信号输出给fpga主控模块。
52.需要说明的是,参照图11和图13,力矩采样模块采用ad7606芯片,力矩采样模块经过排母u2与fpga主控模块的排针u14连接,ad芯片的电源端口avcc与5v电源经l6电感后连接。avcc端口同时并联两个电解电容c54、c57及7个瓷片电容c25、c26、c32、c33、c34、c35、c36,同时avcc与串接电阻r12和led1用于电源指示,avcc经电容c37接地滤波,agnd接地。
53.可以理解的是,参照图13,多路信号同步采样电路还包括力矩传感器模块,力矩采样模块与力矩传感器模块连接,力矩传感器模块包括第一力矩传感器和第二力矩传感器,第一力矩传感器用于采集机器设备关节的输入力矩数据并将输入力矩数据输出给力矩采样模块,第二力矩传感器用于采集机器设备关节的输出力矩数据并将输出力矩数据输出给力矩采样模块。
54.需要说明的是,参照图13,5v电源经过电阻r13\r14分压后中点接入par/ser/byte sel管脚db15串接电阻r8后接地,par为高电平1、db15为低电平0,ad的传输方式为串行接口模式。3.3v电源直接入stby#口,rang经电阻r23后接地,convst_a与convst_b均接入fpga主控模块的convst口,reset管脚接入电阻r18、c27构成的复位电路中点;cs接fpga主控模块的片选信号控制cs管脚,3.3v电源经电容c50滤波后接入vdrive,v1-v8管脚经排阻h1后接数字地,v1gnd-v8gnd共同接入数字地,数字地与电源地经电感l4连接在一起。agnd(47)与refgnd均直接接地;refcapa、refcapb直连、串接电解电容c74后接地,refin/refout管脚接入降压芯片u1的out管脚,5v电源经c52接地滤波后接入降压芯片in管脚,out管脚经两并联电容c71、c72后接地,agnd(35、40、41)端口直接接地,regcap(39)串联电容c75后接地,两个avcc(36、37)端口接avcc(5v)端子,regcap(36)端口串联电容c76后接地,ref select(34)接入分压电路电阻r20、r21的中点。
55.可以理解的是,参照图12,多路信号同步采样电路还包括编码器模块,编码器信号包括第一编码器信号和第二编码器信号,编码器模块包括第一编码器和第二编码器,fpga主控模块分别与第一编码器和第二编码器连接,第一编码器用于采集机器设备关节的输入角度数据并根据输入角度数据生成第一编码器信号,且将第一编码器信号输出给fpga主控模块;第二编码器用于采集机器设备关节的输出角度数据并根据输出角度数据生成第二编码器信号,且将第二编码器信号输出给fpga主控模块。
56.需要说明的是,参照图12和图13,os0经电阻r19后接地,os1接电阻r31接电源3.3v,os2接r25后接电源3.3v,os[2:0]=110,设置为64倍过采样。
[0057]
需要说明的是,参照图12,编码器模块基于biss-c协议的第一编码器信号和第二编码器信号经过两个水晶接头rj2、rj3接入,分别经过硬件解码芯片u1的biss1_rx\biss1_tx和u4后由biss2_rx\biss2_tx端口接入fpga主控模块,硬件解码芯片的vcc5v供电,分别接c1\c2滤波,保证供电电源的稳定性。
[0058]
可以理解的是,参照图1,编码器模块通过双路biss-c协议将编码器信号输出给fpga主控模块。
[0059]
需要说明的是,本发明基于fpga主控模块实现了2mhz频率下双路biss-c协议下的编码器信号同步采样,1khz频率下的双路力矩传感器的力矩同步采样,利用fpga主控模块将采集到的信号转为普通的串口输出,再通过usb转串口模块将二路串口信号和一路串口信号整合在一起,也即将力矩信号和编码器信号通过usb转串口模块usb转串口模块整合在一起生成总串口信号,以使硬件与普通电脑usb转串口功能低成本得以实现。
[0060]
可以理解的是,参照图1,usb转串口模块包括第一usb转串口电路、第二usb转串口电路和第三usb转串口电路,第一usb转串口电路、第二usb转串口电路与fpga主控模块连接,第三usb转串口电路用于与上位机连接,第一usb转串口电路用于接收来自fpga主控模块的力矩信号,第二usb转串口电路用于接收来自fpga主控模块的编码器信号,第三usb转串口电路还用于接收来自上位机的控制信号。
[0061]
需要说明的是,参照图5至图8,usb转串口模块实现1路usb转3路串口的功能,1路串口u6.2即第一usb转串口电路用于接收来自fpga主控模块的力矩信号,u6.3即第二usb转串口电路用于接收来自fpga主控模块的编码器信号,u6.4即第三usb转串口电路还用于接收来自上位机的机器设备关节的控制信号。u6.4(第三usb转串口电路)的管脚db0txd、db0rxd、db7ri经rs485转换芯片u3后实现usb转rs485通讯,实现上位机与机器设备关节的modbus-rtu/rs485通讯的物理层。
[0062]
可以理解的是,参照图8,usb转串口模块还包括升压电路,升压电路与第三usb转串口电路连接,其中,
[0063]
升压电路为3.3v转6v的dc/dc升压电路。
[0064]
需要说明的是,升压电路的设置,能够满足usb转串口芯片中的6v直流电的供电需求。
[0065]
需要说明的是,参照图7,usb转串口模块还包括usb接上位机电路,usb接上位机电路与usb转串口芯片通过ud+、ud-引脚连接,usb2的vcc管脚接5v电源,同时vcc管脚串接电阻r2后接地,usb2的其余管脚直接接地。
[0066]
可以理解的是,参照图4,fpga主控模块包括主控电路和fpga-ad接口电路,主控电路与fpga-ad接口电路连接,fpga-ad接口电路与力矩采样模块连接。
[0067]
需要说明的是,参照图4和图5,为防止fpga主控模块与电源的互相干扰,主控电路的5v电源口并联c28至c31四个电容,主控电路中的busy经排针u14接ad芯片的busy管脚,用于指示ad芯片的状态、convst与ad芯片的convst_a、convst_b同时连接,用于接收ad芯片采样到的力矩数据,cs接ad芯片的片选信号口cs。biss1_rx和biss1_tx接收来自第一编码器经芯片u1解码后的第一编码器信号,biss2_rx和biss2_tx的biss1_rx\biss1_tx接收来自第二编码器经芯片u1解码后的第二编码器信号。rd/sclk接入ad的rd/sclk端口,为ad芯片的串行数据传输提供时钟信号。uart1_rx、uart1_tx、uart2_rx、uart2_tx分别与图3的串口
芯片的u6.2、u6.3的相关端口连接、将fpga主控模块中的力矩信号和编码器信号传给usb转串口芯片。其中,力矩数据包括输入力矩数据和输出力矩数据,ad芯片为力矩采样模块。fpga-ad接口电路与力矩采样模块连接,fpga-ad接口电路用于接收来自力矩采样模块的力矩信号。
[0068]
可以理解的是,参照图9和图10,多路信号同步采样电路还包括电源模块,电源模块与fpga主控模块连接,电源模块用于为fpga主控模块供电。
[0069]
需要说明的是,参照图9和图10,电源模块还与力矩采样模块、力矩传感器模块连接,电源模块用于为力矩采样模块和力矩传感器模块供电。
[0070]
可以理解的是,参照图9和图10,电源模块包括第一降压电路和第二降压电路,第一降压电路与第二降压电路连接,其中,
[0071]
第一降压电路为24v转5v的dc/dc降压电路;
[0072]
第二降压电路为5v转3.3v的dc/dc降压电路。
[0073]
需要说明的是,第一降压电路的设置,能够满足多路信号同步采样电路中的5v直流电的供电需求;第二降压电路的设置,能够满足多路信号同步采样电路中的3.3v直流电的供电需求,这有利于电源模块满足多种供电需求。
[0074]
需要说明的是,参照图9,在第一降压电路中,24v供电电源经lmr14020降压稳压器转后变为5v,24v电源经过端子p5接入电路,24v电源正极经过d3防反二极管接入lmr14020降压稳压器vin和en;24v电源正极经d1嵌位二极管后接地,r27与c40串联组成输入端的泄放回路,c38、c39、c5、c6并联组成输入端的滤波电路;c42连接boot和sw构成自举电路,sw经过d5嵌位到5v,再经过电感l3输出5v,降压稳压器的gnd和fpad直接接地,ss管脚经电容c41后接地,r29与r1串联连接输出和地,输入5v经过r29分压后接入降压稳压器fb管脚;c43与r29并联滤波,c44连接输出和地,led4、r26串联接入输出和地,实现电源接通指示。
[0075]
需要说明的是,参照图10,在第二降压电路中,5v电源经过ams1117-3.3线性稳压电路变为3.3v。5v电源经过电容c45、c46滤波后接入线性稳压器的vin、稳压器3、4管脚vout直连,再经过电容c48接入地,adj管脚直接接地,4脚经c47滤波后输出为3.3v。
[0076]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0077]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
[0078]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1