一种基于AI智能搜救机器人的制作方法
一种基于ai智能搜救机器人
技术领域
1.本发明涉及智能救援领域,具体的说是一种基于ai智能搜救机器人。
背景技术:
2.随着人口数量的增多,人口密度日益变大,但是当发生意外事故时,救援工作难度会大大提升,救援人员一方面忙着疏散人群,一方面放着救援工作,同时在救援工作中,还有一部分生命垂危的人员,救援人员难以及时给与帮助,当发生火灾时,空气中的二氧化碳浓度急剧增加,使人难以呼吸,致使死亡,如果可以在复杂的救援环境中,及时为受难人员提供氧气设备的同时找到一条快速撤离的路线,对于救援工作将有着极大的帮助。
技术实现要素:
3.本发明针对已有的救援设备的不足,提供一种可以智能检测生命信息、及时供氧,精确寻路的基于ai智能搜救机器人。
4.本发明解决其技术问题所采用的技术方案是:提供一种基于ai智能搜救机器人,包括:主控模块、电源电路、接口电路、检测电路、驱动电路、线索采集电路、应急电路、照明电路、通信电路,所述电源电路为机器人的运动以及整个机器人的控制系统提供稳定的电源电压,所述接口电路可以进行连接外围电子设备,所述检测电路可以检测各项环境指数,所述驱动电路为机器人的救援提供动力保障,所述线索采集电路可以采集事故发生场所的声音、温湿度等信息,所述应急电路包括灭火电路、通风电路、供氧电路,所述照明电路可以在较暗的环境下进行照明指引,所述通信电路可以与所连接的电子设备保持实时数据交互。
5.进一步的,所述主控模块包括芯片u32,所述芯片u32的管脚21、22接电源,电容c128、c129设置在电源和地之间,所述芯片u32的管脚37、50、73分别经电阻r129、电容c131、c132接地,管脚49分别经电容c130、电阻r130接地,管脚12、13分别经电容c1、c2接地,电阻r1、晶振y3设置在所述芯片u32的管脚12、13之间,所述芯片u32的管脚14的第一引线经电阻r2接地,第二引线经电容c3接地,电键s1设置在电容c3的两端,电容c133-c139为所述芯片u32的滤波电容,所述芯片u32的型号为stm32f407vet6。
6.进一步的,所述电源电路包括芯片u5-u7,所述芯片u5为24v转5v的降压电路,所述芯片u6为5v转3.3v的降压电路,所述芯片u7为24v转12v的降压电路,所述芯片u5的型号为ams1117-5.0,所述芯片u6的型号为ams1117-3.3,所述芯片u7的型号为xl6009。
7.进一步的,所述接口电路包括接口p1-p4所述接口p1的管脚5、7、17、19的第一引线经电阻r12-15接电源,第二引线分别接所述接口p3的管脚57、55、53、51,所述接口p1的管脚9接所述接口p3的管脚16,管脚4、6、8、10分别接所述芯片u32的管脚2-5,所述接口p2的管脚3、11分别经电阻r16、r17接电源,管脚4经电阻r18接所述接口p3的管脚33,管脚10接所述接口p3的管脚59,管脚16经电阻r19接地,所述接口p3的管脚1-3分别经电阻r20接电源,所述接口p4的管脚1接电源,管脚2接地,管脚3、5、6接所述接口p3的管脚6、4、8,所述接口p1的型
号为lvds接口,接口p2的型号为为cs1接口,接口p3的型号为jtag接口。
8.进一步的,所述检测电路包括温湿度、火焰、可燃气体、颗粒物、运动检测电路,所述温湿度检测电路包括芯片u10,所述芯片u19的管脚2、4的第一引线经电阻r72、r71接电源,第二引线分别接所述芯片u32的管脚48、47,所述芯片u10的型号为am2321,所述火焰检测电路包括芯片u14,所述芯片u14的管脚2、3分别经电阻r78、电容c64接地,管脚8接电源,二极管d1设置在所述芯片u14的管脚3和地之间,所述芯片u14的管脚1的第一引线经电阻r80接电源,第二引线接所述芯片u32的管脚45,所述芯片u14的型号为lm393adt,所述可燃气体检测电路包括芯片u15,所述芯片u15的管脚4、6的第一引线经电阻r82接地,第二引线经电阻r83接所述芯片u32的管脚23,所述颗粒物检测电路包括芯片u17,所述芯片u17的管脚5、3接所述芯片u32的管脚43、42,所述芯片u17的型号为gp2y1014au,所述运动检测电路包括芯片u18,所述芯片u18的管脚16、1接电源,电容c67-c69设置在电源和地之间,所述芯片u18的管脚2-5接所述芯片u32的管脚24、32、31、9,所述芯片u18的型号为icm20602。
9.进一步的,所述驱动电路包括芯片u26-29,电机mi、m2,所述芯片u26的管脚5经电阻r100接电源,管脚8经电阻r101接地,管脚1、11分别经电容c106、c107接所述芯片u26的管脚2、10,电机m1设置在所述芯片u26的管脚2、10之间,所述芯片u26的管脚3、9分别经电阻r99、r102接所述芯片u32的管脚65、2,管脚6接电源,电容c104、c105设置在电源和地之间,所述芯片u27-u29的接线方式与u26相同,在此不予赘述,所述芯片u26-u29的型号为lmd18200,所述电机m1、m2的管脚1接地、管脚2接电源,管脚3分别接所述芯片u32的管脚67、66。
10.进一步的,所述线索采集电路包括噪音采集电路、生命信息采集电路,图像采集电路,所述噪音采集电路包括芯片u30、u31、接口h1,所述芯片u30的管脚2的第一引线经电阻r121接所述芯片u30的管脚3,第二引线经电阻r119、电容c121接地,所述芯片u30的管脚3经电容c122、电阻r117、r115接电源,电容c123、电阻r118、r120设置在电源和地之间,所述接口h1的管脚2经电阻r116、r115接电源,管脚1接地,所述接口h1的型号为mic,所述芯片u30的管脚1经电阻r122、电容c124、c125接所述芯片u31的管脚1,所述芯片u31的管脚1分别经电阻r123、r124接地,管脚2经电阻r125、电容c126接地,管脚4的第一引线经电阻r125、r126、电容c126接地,第二引线经电阻r127接地,第三引线经电容c127、电阻r128接所述芯片u32的管脚1,所述芯片u30的型号为ne5532,所述芯片u31的型号为lm1875,所述生命信息采集电路包括芯片u1,所述芯片u1的管脚1-6分别经天线t1-t6接地,管脚c15、d15分别经电容c1、c2接地,晶振y1设置在所述芯片u1的管脚c15、d15之间,所述芯片u1的输出端分别接所述接口电路的对应管脚,滤波电容c3-c12设置在电源和地之间,所述芯片u1的型号为iwr1642aqagabl,所述图像采集电路包括接口pc1,所述接口pc1的管脚16接电源,管脚1-8接所述芯片u32的管脚91-84,管脚9-14分别接所述芯片u32的管脚52、51、59、58、96、95,所述接口pc1的型号为ov7076。
11.进一步的,所述应急灭火电路包括继电器dk1,接口h2,所述继电器dk1的输出端接所述接口h2,输入端接所述三极管q8的集电极,所述三极管q8的发射极接地,基极经电阻r93接所述芯片u32的管脚38,所述继电器dk1的型号为hk4100f,所述供氧电路包括mos管q9、电机m3,所述电机m3的管脚1接电源,管脚2接所述mos管的漏极,所述mos管的源极接地,栅极的第一引线经电阻r98接地,第二引线接所述芯片u32的管脚35,所述通风电路包括芯
片u25,所述芯片u25的管脚5经电阻r95接电源,管脚8经电阻r96接地,管脚1、11分别经电容c102、c103接所述芯片u26的管脚2、10,电机m4设置在所述芯片u26的管脚2、10之间,所述芯片u25的管脚3、9分别经电阻r94、r97接所述芯片u32的管脚39、34,管脚6接电源,电容c100、c101设置在电源和地之间,所述芯片u25的型号为lmd18200。
12.进一步的,所述照明电路包括按键电路、led电路、指示灯电路、存储电路,所述led电路包括芯片u24,所述芯片u24的管脚2经发光led1-6接mos管q10的漏极,管脚3经电阻r89接所述芯片u24的管脚2,管脚5经电阻r90、二极管d11接所述mos管q10的漏极,管脚1经电容c99接地,管脚8的第一引线经电阻r91接地,第二引线接所述mos管的栅极,所述mos管q10的源极接地,所述指示灯电路包括指示灯led7-10,所述指示灯led7-10的输入端接所述芯片u32的管脚64、63、70、71,输出端经电阻r136-r139接地,所述按键电路包括芯片u34,所述芯片u34的管脚10、11、13、14的第一引线分别经电阻r140-r43接电源,第二引线接所述芯片u32的管脚77-80,所述芯片u34的管脚4、5、6、9的第一引线经电阻r140-143接pad接点ti-t4,第二引线经电容c140-143接地,所述芯片u34的型号为adsts04,所述存储电路包括芯片u9,所述芯片u9的管脚1、2、3、5、6、7分别接所述芯片u32的管脚8、32、15、29、30、31,管脚8的第一引线接电源,第二引线经电容c58接地,所述芯片u9的型号为w25n04kv。
13.进一步的,所述通信电路包括芯片u19、u22、u23、接口h5,所述芯片u19的管脚13、14接电源,管脚16经电容c71接地,电容c72设置在电源和地之间,所述芯片u19的管脚6、7接所述芯片u32的管脚56、55,所述芯片u19的型号为ec20,所述芯片u22的管脚14、24接电源,电容c73、c79、c80设置在电源和地之间,所述芯片u22的管脚5、6分别经电容c74、c75接地,晶振y2设置在所述芯片u22的管脚5、6之间,所述芯片u22的管脚2、4分别经电容c77、c78接地,管脚1经电容c87、c92接所述芯片u23的管脚1,管脚27、28分别经电感l13、l17接所述芯片u23的管脚3,管脚25经电容c81-c83接地,电感l18设置在所述芯片u22的管脚27、25之间,电容c88-c93为电感l15、l16的滤波电容,所述芯片u23的管脚5经电容c95、电感l12接所述接口h5的管脚1,管脚6的第一引线接电源,第二引线经电容c96接地,所述芯片u23的管脚4的第一引线经电容c94接地,第二引线经电阻r88接所述芯片u32的管脚33,所述芯片u22的型号为sx1278,所述芯片u23的型号为rfswitch。
14.与现有技术相比,本发明的有益效果是:1.拥有多种检测电路,可以检测复杂救援环境的各项环境指标,并及时分析,找到一条快速撤离的出路;2.拥有多种应急电路,可以及时为受难人员进行紧急供氧,同时用灭火器灭火,当周围环境较暗时,可以及时开灯;3拥有线索采集电路,可以及时复杂的救援环境,及时找到被困人员;4.拥有独立电源驱动电路,为机器人的救援提供持久的续航;5.拥有多种通信电路,可以及时将采集的线索上传至外围电子设备,为进一步扩大救援提供线索。
附图说明
15.附图1为本发明的整体结构的原理结构示意图附图2为本发明的主控模块的原理结构示意图;
附图3为本发明的电源电路的原理结构示意图;附图4为本发明的接口电路的原理结构示意图;附图5为本发明的检测电路的原理结构示意图;附图6为本发明的驱动电路的原理结构示意图;附图7、8为本发明的线索采集电路的原理结构示意图;附图9为本发明的应急电路的原理结构示意图;附图10为本发明的照明电路的原理结构示意图;附图11为本发明的通信电路的原理结构示意图。
具体实施方式
16.为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明,附图中给出了本发明的较佳的实施例,但是,本发明可以以许多不同的形式来实现,并不限于本说明书所描述的实施例,相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
17.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。
18.下面结合附图对本发明作以下详细地说明。
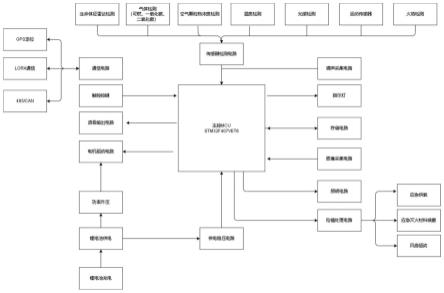
19.实施例1,如图1所示,一种基于ai智能搜救机器人,包括:主控模块、电源电路、接口电路、检测电路、驱动电路、线索采集电路、应急电路、照明电路、通信电路,所述电源电路为机器人的运动以及整个机器人的控制系统提供稳定的电源电压,所述接口电路可以连接外围电子设备,所述检测电路可以检测各项环境指数,所述驱动电路为机器人的救援提供动力保障,所述线索采集电路可以采集事故发生场所的声音、温湿度等信息,所述应急电路包括灭火电路、通风电路、供氧电路,所述照明电路可以在较暗的环境下进行照明指引,所述通信电路可以与所连接的电子设备保持实时数据交互。
20.实施例2,如图2所示,所述主控模块包括芯片u32,所述芯片u32的管脚21、22接电源,电容c128、c129设置在电源和地之间,所述芯片u32的管脚37、50、73分别经电阻r129、电容c131、c132接地,管脚49分别经电容c130、电阻r130接地,管脚12、13分别经电容c1、c2接地,电阻r1、晶振y3设置在所述芯片u32的管脚12、13之间,所述芯片u32的管脚14的第一引线经电阻r2接地,第二引线经电容c3接地,电键s1设置在电容c3的两端,电容c133-c139为所述芯片u32的滤波电容,所述芯片u32的型号为stm32f407vet6。在本实施例中,实施例3,如图3所示,所述电源电路包括芯片u5-u7,所述芯片u5为24v转5v的降压电路,所述芯片u6为5v转3.3v的降压电路,所述芯片u7为24v转12v的降压电路,所述芯片u5的型号为ams1117-5.0,所述芯片u6的型号为ams1117-3.3,所述芯片u7的型号为xl6009。
21.在本实施例中,电源电路主要是对锂电池进行稳压,主要包含12v、5v、3.3v等电源的稳压,12v为机器人的电机提供稳定的电源电源,5v为各项检测电路提供稳定的电源电压,3.3v为主控模块提供稳定的电源电压,采取不同的电源电压进行输出,可以使机器人的运转更加稳定。
22.实施例4,如图4所示,所述接口电路包括接口p1-p4所述接口p1的管脚5、7、17、19
的第一引线经电阻r12-15接电源,第二引线分别接所述接口p3的管脚57、55、53、51,所述接口p1的管脚9接所述接口p3的管脚16,管脚4、6、8、10分别接所述芯片u32的管脚2-5,所述接口p2的管脚3、11分别经电阻r16、r17接电源,管脚4经电阻r18接所述接口p3的管脚33,管脚10接所述接口p3的管脚59,管脚16经电阻r19接地,所述接口p3的管脚1-3分别经电阻r20接电源,所述接口p4的管脚1接电源,管脚2接地,管脚3、5、6接所述接口p3的管脚6、4、8,所述接口p1的型号为lvds接口,接口p2的型号为为cs1接口,接口p3的型号为jtag接口。
23.在本实施例中,各种接口可以连接不同的电子设备,在救援环境中,可以通过连接各种接口,进行数据的快速传输。
24.实施例5,如图5所示,所述检测电路包括温湿度、火焰、可燃气体、颗粒物、运动检测电路,所述温湿度检测电路包括芯片u10,所述芯片u19的管脚2、4的第一引线经电阻r72、r71接电源,第二引线分别接所述芯片u32的管脚48、47,所述芯片u10的型号为am2321,所述火焰检测电路包括芯片u14,所述芯片u14的管脚2、3分别经电阻r78、电容c64接地,管脚8接电源,二极管d1设置在所述芯片u14的管脚3和地之间,所述芯片u14的管脚1的第一引线经电阻r80接电源,第二引线接所述芯片u32的管脚45,所述芯片u14的型号为lm393adt,所述可燃气体检测电路包括芯片u15,所述芯片u15的管脚4、6的第一引线经电阻r82接地,第二引线经电阻r83接所述芯片u32的管脚23,所述颗粒物检测电路包括芯片u17,所述芯片u17的管脚5、3接所述芯片u32的管脚43、42,所述芯片u17的型号为gp2y1014au,所述运动检测电路包括芯片u18,所述芯片u18的管脚16、1接电源,电容c67-c69设置在电源和地之间,所述芯片u18的管脚2-5接所述芯片u32的管脚24、32、31、9,所述芯片u18的型号为icm20602。
25.在本实施例中,检测电路主要包含了火焰探测、气体检测、环境颗粒物检测、温湿度检、运动传感器,保证在特殊环境的情况下,机器人可以将采集到的环境数据给到消防人员,确保消防人员在救人的同时也可以自身安全。
26.实施例6,如图6所示,所述驱动电路包括芯片u26-29,电机mi、m2,所述芯片u26的管脚5经电阻r100接电源,管脚8经电阻r101接地,管脚1、11分别经电容c106、c107接所述芯片u26的管脚2、10,电机m1设置在所述芯片u26的管脚2、10之间,所述芯片u26的管脚3、9分别经电阻r99、r102接所述芯片u32的管脚65、2,管脚6接电源,电容c104、c105设置在电源和地之间,所述芯片u27-u29的接线方式与u26相同,在此不予赘述,所述芯片u26-u29的型号为lmd18200,所述电机m1、m2的管脚1接地、管脚2接电源,管脚3分别接所述芯片u32的管脚67、66。
27.在本实施例中,驱动电机为机器人运动提供动力保障,采用大功率驱动芯片,并且提供4驱动力,保证机器人可以在高负荷情况下正常工作。
28.实施例7,如图7、8所示,所述线索采集电路包括噪音采集电路、生命信息采集电路,图像采集电路,所述噪音采集电路包括芯片u30、u31、接口h1,所述芯片u30的管脚2的第一引线经电阻r121接所述芯片u30的管脚3,第二引线经电阻r119、电容c121接地,所述芯片u30的管脚3经电容c122、电阻r117、r115接电源,电容c123、电阻r118、r120设置在电源和地之间,所述接口h1的管脚2经电阻r116、r115接电源,管脚1接地,所述接口h1的型号为mic,所述芯片u30的管脚1经电阻r122、电容c124、c125接所述芯片u31的管脚1,所述芯片u31的管脚1分别经电阻r123、r124接地,管脚2经电阻r125、电容c126接地,管脚4的第一引线经电阻r125、r126、电容c126接地,第二引线经电阻r127接地,第三引线经电容c127、电阻r128接
所述芯片u32的管脚1,所述芯片u30的型号为ne5532,所述芯片u31的型号为lm1875,所述生命信息采集电路包括芯片u1,所述芯片u1的管脚1-6分别经天线t1-t6接地,管脚c15、d15分别经电容c1、c2接地,晶振y1设置在所述芯片u1的管脚c15、d15之间,所述芯片u1的输出端分别接所述接口电路的对应管脚,滤波电容c3-c12设置在电源和地之间,所述芯片u1的型号为iwr1642aqagabl,所述图像采集电路包括接口pc1,所述接口pc1的管脚16接电源,管脚1-8接所述芯片u32的管脚91-84,管脚9-14分别接所述芯片u32的管脚52、51、59、58、96、95,所述接口pc1的型号为ov7076。
29.在本实施例中,噪声采集可以对火场环境进行声音采集,也可以采集人发出的声音,或者进行语音指令,图像采集可以进行环境的图像采集,并通过无线进行传输,生命探测电路可以发射高频雷达波,检测屋内是否有生命体征,在距离相对近的时候,可以精准检测到心跳、呼吸等生命体征,并且配有视频接入与输出接口。
30.实施例8,如图9所示,所述应急灭火电路包括继电器dk1,接口h2,所述继电器dk1的输出端接所述接口h2,输入端接所述三极管q8的集电极,所述三极管q8的发射极接地,基极经电阻r93接所述芯片u32的管脚38,所述继电器dk1的型号为hk4100f,所述供氧电路包括mos管q9、电机m3,所述电机m3的管脚1接电源,管脚2接所述mos管的漏极,所述mos管的源极接地,栅极的第一引线经电阻r98接地,第二引线接所述芯片u32的管脚35,所述通风电路包括芯片u25,所述芯片u25的管脚5经电阻r95接电源,管脚8经电阻r96接地,管脚1、11分别经电容c102、c103接所述芯片u26的管脚2、10,电机m4设置在所述芯片u26的管脚2、10之间,所述芯片u25的管脚3、9分别经电阻r94、r97接所述芯片u32的管脚39、34,管脚6接电源,电容c100、c101设置在电源和地之间,所述芯片u25的型号为lmd18200。
31.在本实施例中,应急灭火电路可以用灭火器清理出一条紧急逃生线路,当室内二氧化碳浓度较高时,可以对围困人员进行紧急供氧。
32.实施例9,如图10所示,所述照明电路包括按键电路、led电路、指示灯电路、存储电路,所述led电路包括芯片u24,所述芯片u24的管脚2经发光led1-6接mos管q10的漏极,管脚3经电阻r89接所述芯片u24的管脚2,管脚5经电阻r90、二极管d11接所述mos管q10的漏极,管脚1经电容c99接地,管脚8的第一引线经电阻r91接地,第二引线接所述mos管的栅极,所述mos管q10的源极接地,所述指示灯电路包括指示灯led7-10,所述指示灯led7-10的输入端接所述芯片u32的管脚64、63、70、71,输出端经电阻r136-r139接地,所述按键电路包括芯片u34,所述芯片u34的管脚10、11、13、14的第一引线分别经电阻r140-r43接电源,第二引线接所述芯片u32的管脚77-80,所述芯片u34的管脚4、5、6、9的第一引线经电阻r140-143接pad接点ti-t4,第二引线经电容c140-143接地,所述芯片u34的型号为adsts04,所述存储电路包括芯片u9,所述芯片u9的管脚1、2、3、5、6、7分别接所述芯片u32的管脚8、32、15、29、30、31,管脚8的第一引线接电源,第二引线经电容c58接地,所述芯片u9的型号为w25n04kv。
33.在本实施例中,当周围环境较暗时,可以进行led补光,同时电路配备按键和指示灯电路,可以通过按键对机器人进行指令操作,也可以通过语音对机器人发布指令。
34.实施例10,如图11所示,所述通信电路包括芯片u19、u22、u23、接口h5,所述芯片u19的管脚13、14接电源,管脚16经电容c71接地,电容c72设置在电源和地之间,所述芯片u19的管脚6、7接所述芯片u32的管脚56、55,所述芯片u19的型号为ec20,所述芯片u22的管脚14、24接电源,电容c73、c79、c80设置在电源和地之间,所述芯片u22的管脚5、6分别经电
容c74、c75接地,晶振y2设置在所述芯片u22的管脚5、6之间,所述芯片u22的管脚2、4分别经电容c77、c78接地,管脚1经电容c87、c92接所述芯片u23的管脚1,管脚27、28分别经电感l13、l17接所述芯片u23的管脚3,管脚25经电容c81-c83接地,电感l18设置在所述芯片u22的管脚27、25之间,电容c88-c93为电感l15、l16的滤波电容,所述芯片u23的管脚5经电容c95、电感l12接所述接口h5的管脚1,管脚6的第一引线接电源,第二引线经电容c96接地,所述芯片u23的管脚4的第一引线经电容c94接地,第二引线经电阻r88接所述芯片u32的管脚33,所述芯片u22的型号为sx1278,所述芯片u23的型号为rfswitch。
35.在本实施例中,通信电路主要使用了4g定位和433m的通信电路,保证在复杂环境仍可以进行高效通信。
36.本发明的工作原理:本设计是基于人工智能开发的一款基于ai智能搜救机器人,它可以在恶劣环境中获取各项环境指标,并能实时的将灾难现场的第一手宝贵资料传回营救中心,以帮助救援指挥部做出正确的判断,它不但能够帮助工作人员执行救援工作,而且能有效率的提高救援效率和减少救援人员的伤亡,该基于ai智能搜救机器人核心是采集环境监测数据,电路搭载可高精度雷达生命提振探测,该芯片可以采集人体的心跳、呼吸灯生命体征,可以精准的确认人员安全情况,另外搭载噪声采集电路、温度传感器、环境气体传感器,方便救援人员了解险区的各项环境指标,电路搭载了lora/433m和4g通信模块,可以在非常复杂的环境中协助消防人员进行搜救任务,机器人进入场地之后,可以根据摄像头智能或者通过app控制机器人进行搜救,向房屋内部进行生命物体进行探测,探测之后可以进行识别等特征,同时机器人搭载了应急灭火设备和供氧装置,在火情小的时候,可以通过装置直接进行救人,在火情环境较大的时,可以通过机器人自身携带的装置保证人员所在的地方维持安全状态,等待消防员救人,并且可以随时保持通信,指导被救人安全逃生。
37.要说明的是,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本发明说明书记载的范围;并且,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1