一种多无人机抢灾救援规划方法
1.本发明属于无人机应用领域,涉及一种多无人机抢灾救援规划方法,特别是一种多目标量子北方苍鹰机制的多无人机抢灾救援规划方法。
背景技术:
2.无人机(unmanned aerial vehicle,uav)是一种有动力、可控制、能够执行多种类型任务的无人驾驶飞行器。其具有造价低廉、机动灵活、部署便捷、续航力长等优点,现已在广泛应用于军事领域、农业领域、搜救领域、环境监测等领域。在生活中,地震、海啸、泥石流等自然灾害时有发生,具有破坏性强、社会影响大、防御难度大的特点,如果发生在村庄或者城市,势必会危害到众人。而这些灾害,往往会伴随余震、水灾、火灾等次生灾害,给人工救援带来极大不便。
3.无人机群技术的核心就是集群智能,也就是在人工智能的控制下,可以自主完成许多任务。而“集群智能”技术的灵感源于蚁群、蜂群等自然界中的集群生物,这类型的生物都有同样的特点,那就是单体都是很弱小的,但是这些生物却有着非常强大的群体协作能力,能够完成诸如蜂巢、蚁穴等。所以,现在的无人机集群智能技术就是模拟了蜜蜂和蚂蚁之间的沟通协作方式,以此来增强无人机群的执行任务效能。
4.根据已有文献发现,李明龙等在《机械工程学报》(2019,55(11):1-9)上发表的“面向灾难搜索救援场景的空地协同无人群体任务规划研究”中面对地震场景,提出了空地协同搜救框架。高空侦察机用做搜索任务,以确定灾区群众地点信息;无人车用做救援任务,以救援受灾群众。并提出了一种自适应反馈调节遗传算法规划无人机和无人车路径。然而,该方法虽然是空地协同规划,但是目标问题考虑单一,而且算法易陷入局部收敛。
5.综上所述,上述文献在无人群体的搜索和救援上取得一定的效果,但是考虑问题过于单一。因此本发明设计了一种多目标的量子北方苍鹰机制多无人机抢灾救援规划方法,无人机的总体飞行代价和伤亡代价作为两个目标函数,在确定受灾群众位置的情况下,以及受灾群众倾向于聚集在一起的特点,得出数个受灾群众的聚集中心,并派出多架无人机合理规划路径运送物资,最大化受灾群众的生存人数。
技术实现要素:
6.针对上述现有技术,本发明要解决的技术问题是提供一种多目标量子北方苍鹰机制的多无人机抢灾救援规划方法,克服现有方法易陷入局部收敛问题,提升了演化机制的寻优速率。
7.为解决上述技术问题,本发明的一种多无人机抢灾救援规划方法,包括以下步骤:
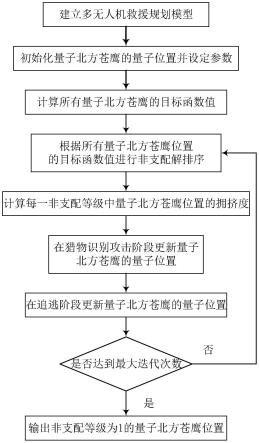
8.步骤一、建立多无人机救援规划模型;
9.步骤二、初始化量子北方苍鹰的量子位置并设定参数;
10.步骤三、计算所有量子北方苍鹰的目标函数值;
11.步骤四、根据所有量子北方苍鹰位置的目标函数值进行非支配解排序;
12.步骤五、计算每一非支配等级中量子北方苍鹰位置的拥挤度;
13.步骤六、在猎物识别攻击阶段更新量子北方苍鹰的量子位置;
14.步骤七、在追逃阶段更新量子北方苍鹰的量子位置;
15.步骤八、判断是否达到量子北方苍鹰的最大迭代次数k2,是则终止迭代,将非支配等级为1的量子北方苍鹰位置对应为任务分配矩阵,并作为抢灾救援规划的任务分配结果输出;否则令k=k+1,继续执行步骤四。
16.进一步的,步骤一中建立多无人机救援规划模型包括:
17.每个灾区群众均有一个中心位置,m架救援无人机会根据中心位置为灾区群众提供救援物资,假设灾区信息确定以后,得到n个群众中心位置,m架救援无人机执行n个救援任务,会得到m
×
n维任务分配矩阵a,a={a
m,n
|a
m,n
∈{0,1}}m×n,其中,表示第m架无人机是否执行第n个任务,m=1,2,
…
,m,n=1,2,
…
,n;不同任务分配矩阵a表示不同的任务分配方案,在燃料约束和载重约束的情况下,优化总体飞行代价和伤亡代价两个目标函数;
18.最小值联合优化模型如下:为救援无人机的总体飞行代价和受灾群众的伤亡代价,表示所有救援无人机的飞行距离总和,表示受灾群众错过救援时间后所造成的伤亡代价总和;无人机的总体飞行代价:c1、c2表示俩个约束条件,ξ1、ξ2为约束条件的影响因子,dm表示第m架无人机从出发到返回基地的飞行距离;受灾群众的伤亡代价:ξ3、ξ4为约束条件的影响因子,ln表示第n个灾区群众的总人数,其中,γ、μ为两个目标函数的影响因子,表示对应目标函数的重要程度,且满足μ>γ;
19.假设第m架无人机被安排依次执行救援任务,则第m架无人机的飞行距离为:其中,为第m架无人机从基地到n1任务地点飞行的距离,为第m架无人机执行完n1任务后,直接从n1地点飞向n2的飞行距离,ηm为第m架无人机的救援任务个数;
20.受灾群众分为四种状态:重伤、轻伤、口渴、饥饿,四种状态的救援期限为:重伤救援期限最短,其次是轻伤、口渴、饥饿;如果第n个灾区的第l个灾民到达救援期限时还没有得到无人机的援助,则判定其为死亡,此时u
n,l
=1,如果在救援期限达到前得到无人机援助,则u
n,l
=0;
21.m架无人机在执行救援任务时,要满足两个约束条件:其一是燃料约束c1,燃料约束条件为:其中,表示两个变量比较大小,第一个数值大于第二个时返回值1,否则返回值0,ιm为第m架无人机携带的燃料,vm为燃料消耗速度;其二是救援任务约束,多架无人机不能重复执行同一任务,救援任务约束为:
其中,是判断两个函数是否相等的函数,相等返回值0,不相等返回值1,是判断非零函数,函数中变量值为0时,返回0值,否则返回1值;
22.设计任务负载均衡因子用于评估方案,当存在不合理的分配方案时,任务负载因子通过判断条件区别分配方案是否合理,不合理的方案将被其剔除,判断条件如下:其中表示向上取整函数。
23.进一步的,步骤二中初始化量子北方苍鹰的量子位置并设定参数包括:
24.设置种群规模为k1,最大迭代次数为k2,在初始种群中,随机初始量子北方苍鹰的量子位置,第i只量子北方苍鹰的第1代初始量子位置为方苍鹰的第1代初始量子位置为其中s是量子位置向量的最大维数,所有量子位置的任一维都是[0,1]之间的随机数,量子北方苍鹰的位置通过量子位置测量得到;第k次迭代中第i只量子北方苍鹰的量子位置为则测量得到第k次迭代中第i只量子北方苍鹰的位置为其中表示第i只量子北方苍鹰位置的第h维变量,为[0,1]之间的随机数,h=1,2,
…
,s。
[0025]
进一步的,步骤三中计算所有量子北方苍鹰的目标函数值包括:
[0026]
第k代第i只量子北方苍鹰的位置均对应一个多无人机的救援任务分配矩阵,具体:将的对应救援任务分配矩阵中第一行的a
1,1
,a
1,2
,
…
,a
1,n
;对应救援任务分配矩阵中第二行的a
2,1
,a
2,2
,
…
,a
2,n
;以此类推,对应救援任务分配矩阵中最后一行的a
m,1
,a
m,2
,
…
,a
m,n
,构成的任务分配矩阵记作最大维数s要满足s=n
·
m;
[0027]
将映射为任务分配矩阵代入到步骤一建立的模型中,得到第k次迭代第i只量子北方苍鹰的目标函数值其中,t=1时表示目标函数飞行代价总和,t=2时表示目标函数伤亡代价总和。
[0028]
进一步的,步骤四中根据所有量子北方苍鹰位置的目标函数值进行非支配解排序包括:
[0029]
存在两个标号为i1和i2的量子北方苍鹰位置分别为和如果所有目标函数都满足且至少有一个目标函数则量子北方苍鹰位置支配量子北方苍鹰位置为非支配解;如果所有目标函数都满足且至少
有一个目标函数则量子北方苍鹰支配量子北方苍鹰为非支配解;如果没有上述关系,则这两个量子北方苍鹰没有支配关系;
[0030]
遍历量子北方苍鹰种群中每只量子北方苍鹰得到支配第i只量子北方苍鹰位置的量子北方苍鹰数目和被支配的量子北方苍鹰位置集合然后统计所有量子北方苍鹰位置的被支配数目,如果则说明没有量子北方苍鹰位置支配的非支配等级为1;如果则的非支配等级为2;以此类推,每只量子北方苍鹰位置的非支配等级为被支配数目加1;最后将所有量子北方苍鹰按照非支配等级升序排序。
[0031]
进一步的,步骤五中计算每一非支配等级中量子北方苍鹰位置的拥挤度包括:
[0032]
假设非支配等级为w的量子北方苍鹰集中有b只量子北方苍鹰,根据第t个目标函数值,进行升序排列,t=1,2,为排序后第量子北方苍鹰的第t个目标函数值,f
tmax
为该量子北方苍鹰集中第t个目标函数的最大值,f
tmin
为该量子北方苍鹰集中第t个目标函数的最小值,则第只量子北方苍鹰中第t个目标函数的拥挤度当或者时,则第只量子北方苍鹰的总拥挤度值为最后对b只量子北方苍鹰按照拥挤度降序排列。
[0033]
进一步的,步骤六中在猎物识别攻击阶段更新量子北方苍鹰的量子位置包括:
[0034]
在猎物识别攻击阶段,受到第i只量子北方苍鹰攻击的猎物量子位置为在猎物识别攻击阶段,受到第i只量子北方苍鹰攻击的猎物量子位置为其中,r是[1,n]之间的随机数,且r≠i;
[0035]
通过更新量子旋转角和量子旋转门得到量子北方苍鹰的量子位置,第i只量子北方苍鹰的第h维量子旋转角为其中,为第k次迭代第i只量子北方苍鹰的第h维量子位置,表示第k次迭代猎物的第h维量子位置,是被第i只量子北方苍鹰捕食的猎物,τ是[0,1]之间的随机数,χ随机取值1或2;
[0036]
利用量子旋转门更新第i只量子北方苍鹰个体的第h维量子位置:通过量子位置测量得到位置然后计算的目标函数值并分类讨论,如果支配则保持结果不变;否则,令具体如下:
[0037]
进一步的,步骤七中在追逃阶段更新量子北方苍鹰的量子位置包括:
[0038]
在追逃阶段,假设狩猎的攻击半径为r,则得到第i只量子北方苍鹰的第h维量子旋
转角:其中攻击半径τ为[0,1]之间的随机数;
[0039]
利用量子旋转门更新第i只量子北方苍鹰个体的第h维量子位置:然后计算的目标函数值并分类讨论,如果支配则保持结果不变,否则,令具体如下:
[0040]
本发明的有益效果:与现有技术相比,本发明的有益效果是:
[0041]
针对地震灾区环境复杂、灾区群众急需物资的难题,本发明设计了量子北方苍鹰机制规划无人机并救援灾区群众,以最小化总体飞行距离和伤亡代价作为两个目标函数。使用量子北方苍鹰机制优化目标函数,得到一组pareto前端解。由于总体飞行代价和伤亡代价目标函数存在冲突,减少总体飞行距离的同时,会增加伤亡代价;减少伤亡代价的同时,会增加无人机的飞行距离,每架无人机携带的燃料是有限的,过于注重减少伤亡代价,反而会影响无人机的执行任务效率,最终会导致极大伤亡。因此,设计了量子北方苍鹰机制,克服过去算法易陷入局部收敛问题。并使用了非支配解排序和拥挤度计算的方法对量子北方苍鹰个体进行评价,使整个量子北方苍鹰群向有较高的非支配等级和较大拥挤度的量子北方苍鹰个体演化。
[0042]
(1)设计的多无人机救援规划方法,考虑问题更加全面。在群众灾民中,设置了灾民的四种状态:重伤、轻伤、口渴和饥饿,分别对应不同的救援期限;在现实生活中,受难人群总是倾向于聚集在一起的特点,所以引入了灾民中心位置,更符合实际救援中的灾民情况,也缩短了仿真时间。在无人机中,引入了载重约束条件和燃料约束条件,使得无人机更加贴近现实情况。
[0043]
(2)本发明建立的模型属于多目标优化问题,这是现有技术较少研究的,相比于以往的单目标多无人机救援规划,极大地增加了仿真难度。模型中建立的目标函数:伤亡代价和飞行代价总和。在优化一个目标函数时,另一个目标函数往往会变差,这符合现实生活中,不能片面考虑问题的思路,因此本发明具有现实研究意义。
[0044]
本发明设计了多目标量子北方苍鹰机制方法,设计了量子编码的北方苍鹰量子位置演化机制,得到一种新的量子北方苍鹰机制方法,克服了过去方法容易陷入局部收敛的弊端,也提升了演化机制的寻优速率。并且使用了非支配解排序方法和拥挤度计算法对种群进行排序,最终可以得到均匀的pareto前端解。
附图说明
[0045]
图1为本发明所设计的基于量子北方苍鹰机制的多无人机抢灾救援规划方法流程图。
[0046]
图2为moqngo和moqkh方法获得的非支配解对比图。
[0047]
图3为moqngo和moqkh方法得到的非支配解对比图。
[0048]
图4为moqngo和moqkh方法得到的非支配解对比图。
[0049]
图5为moqngo和moqkh方法得到的非支配解对比图。
具体实施方式
[0050]
下面结合说明书附图和具体实施例对本发明做进一步说明。
[0051]
结合图1,本发明包括以下步骤:
[0052]
步骤一,建立多无人机救援规划模型。
[0053]
根据灾区群众倾向于聚集在一起等待救援的特点,则每个灾区群众均有一个中心位置,m架救援无人机会根据这些中心位置为灾区群众提供救援物资。假设灾区信息确定以后,这时会得到n个群众中心位置。m架救援无人机执行n个救援任务,会得到m
×
n维任务分配矩阵a,a={a
m,n
|a
m,n
∈{0,1}}m×n,其中,表示第m架无人机是否执行第n个任务,m=1,2,
…
,m,n=1,2,
…
,n。不同任务分配矩阵a表示不同的任务分配方案,在燃料约束和载重约束的情况下,优化总体飞行代价和伤亡代价两个目标函数,是本发明的重点。
[0054]
最小值联合优化模型如下:为救援无人机的总体飞行代价和受灾群众的伤亡代价。前者表示所有救援无人机的飞行距离总和,后者表示受灾群众错过救援时间后所造成的伤亡代价总和。无人机的总体飞行代价:c1、c2表示俩个约束条件,ξ1、ξ2为约束条件的影响因子,dm表示第m架无人机从出发到返回基地的飞行距离,由于群众中心位置确定,故飞行距离可以提前预测。受灾群众的伤亡代价:前预测。受灾群众的伤亡代价:ξ3、ξ4为约束条件的影响因子,ln表示第n个灾区群众的总人数。其中,γ、μ为两个目标函数的影响因子,表示对应目标函数的重要程度,且满足μ>γ。
[0055]
假设第m架无人机被安排依次执行救援任务,则第m架无人机的飞行距离为:其中,为第m架无人机从基地到n1任务地点飞行的距离,为第m架无人机执行完n1任务后,直接从n1地点飞向n2的飞行距离,ηm为第m架无人机的救援任务个数。
[0056]
在受灾群众里,均具有各自的健康情况,并且需要不同的援助。大致可以分为四种状态:重伤、轻伤、口渴、饥饿。四种状态的救援期限不同,其中,重伤最为紧急,救援期限最短,其次是轻伤、口渴、饥饿。如果第n个灾区的第l个灾民到达救援期限时还没有得到无人机的援助,则判定其为死亡,此时u
n,l
=1,如果在救援期限达到前得到无人机援助,则u
n,l
=0。
[0057]
m架无人机在执行救援任务时,要满足两个约束条件。其一是燃料约束c1,无人机携
带的燃料是有限的,燃料限制了无人机的总航程,因此燃料约束条件为:带的燃料是有限的,燃料限制了无人机的总航程,因此燃料约束条件为:其中,表示两个变量比较大小,第一个数值大于第二个时返回值1,否则返回值0。lm为第m架无人机携带的燃料,vm为燃料消耗速度。其二是救援任务约束,每个救援任务只能得到一架无人机执行,所以多架无人机不能重复执行该任务,救援任务约束为:其中,是判断两个函数是否相等的函数,相等返回值0,不相等返回值1。是判断非零函数,函数中变量值为0时,返回0值,否则返回1值。
[0058]
在分配救援任务时,有可能会出现多数任务分给一架无人机的情况,然而救援任务时有限的,这就导致了有的无人机做了多个任务,有的无人机没有任务可做。从而降低了任务执行效率,使大多数灾民错过救援期限。基于此,提出了任务负载均衡因子,任务负载均衡因子会评估方案,当存在不合理的分配方案时,任务负载因子通过判断条件区别分配方案是否合理,不合理的方案将被其剔除,判断条件如下:其中表示向上取整函数。
[0059]
步骤二,初始化量子北方苍鹰的量子位置并设定参数。
[0060]
设置种群规模为k1,最大迭代次数为k2。在初始种群中,随机初始量子北方苍鹰的量子位置,第i只量子北方苍鹰的第1代初始量子位置为量子位置,第i只量子北方苍鹰的第1代初始量子位置为其中s是量子位置向量的最大维数,所有量子位置的任一维都是[0,1]之间的随机数,量子北方苍鹰的位置可通过量子位置测量得到。第k次迭代中第i只量子北方苍鹰的量子位置为则可以测量得到第k次迭代中第i只量子北方苍鹰的位置为其中表示第i只量子北方苍鹰位置的第h维变量,为[0,1]之间的随机数,h=1,2,
…
,s。
[0061]
步骤三,计算所有量子北方苍鹰的目标函数值。
[0062]
第k代第i只量子北方苍鹰的位置均对应一个多无人机的救援任务分配矩阵,具体:将的对应救援任务分配矩阵中第一行的a
1,1
,a
1,2
,
…
,a
1,n
;对应救援任务分配矩阵中第二行的a
2,1
,a
2,2
,
…
,a
2,n
;以此类推,对应救援任务分配矩阵中最后一行的a
m,1
,a
m,2
,
…
,a
m,n
,构成的任务分配矩阵记作因此,最大维数s要满足s=n
·
m。
[0063]
将映射为任务分配矩阵带入到本发明建立的模型中,得到第k次迭代第i只量子北方苍鹰的目标函数值其中,t=1时表示目
标函数飞行代价总和,t=2时表示目标函数伤亡代价总和。
[0064]
步骤四,根据所有量子北方苍鹰位置的目标函数值进行非支配解排序。
[0065]
本发明建立的模型中,属于最小值优化问题。因此,存在两个标号为i1和i2的量子北方苍鹰位置分别为和如果所有目标函数都满足且至少有一个目标函数则量子北方苍鹰位置支配量子北方苍鹰位置为非支配解。反之,如果所有目标函数都满足且至少有一个目标函数则量子北方苍鹰支配量子北方苍鹰为非支配解。如果没有上述关系,则这两个量子北方苍鹰没有支配关系。
[0066]
遍历量子北方苍鹰种群中每只量子北方苍鹰得到支配第i只量子北方苍鹰位置的量子北方苍鹰数目和被支配的量子北方苍鹰位置集合p
ik
。然后统计所有量子北方苍鹰位置的被支配数目,如果则说明没有量子北方苍鹰位置支配的非支配等级为1;如果则的非支配等级为2;以此类推,每只量子北方苍鹰位置的非支配等级为被支配数目加1。最后将所有量子北方苍鹰按照非支配等级升序排序。
[0067]
步骤五,计算每一非支配等级中量子北方苍鹰位置的拥挤度。
[0068]
假设非支配等级为w的量子北方苍鹰集中有b只量子北方苍鹰,根据第t个目标函数值,进行升序排列,t=1,2,为排序后第量子北方苍鹰的第t个目标函数值,f
tmax
为该量子北方苍鹰集中第t个目标函数的最大值,f
tmin
为该量子北方苍鹰集中第t个目标函数的最小值,则第只量子北方苍鹰中第t个目标函数的拥挤度当或者时,则第只量子北方苍鹰的总拥挤度值为最后对b只量子北方苍鹰按照拥挤度降序排列。
[0069]
步骤六,在猎物识别攻击阶段更新量子北方苍鹰的量子位置。
[0070]
量子北方苍鹰在狩猎过程中,主要有两种行为:猎物识别攻击阶段和追逃阶段。这是模拟了自然界中北方苍鹰的捕食习性,前者用于全局搜索,后者用于局部搜索。在猎物识别攻击阶段:量子北方苍鹰随机选择一个猎物迅速攻击它,由于在搜索空间中随机选择,这一阶段增加了对搜索空间的全局搜索,目的是确定最优区域。受到第i只量子北方苍鹰攻击的猎物量子位置为其中,r是[1,n]之间的随机数,且r≠i。
[0071]
在量子北方苍鹰方法中,量子北方苍鹰的量子位置是通过更新量子旋转角和量子旋转门得到的,相比北方苍鹰方法,提高了寻优速率和最优解质量,第i只量子北方苍鹰的
第h维量子旋转角为其中,为第k次迭代第i只量子北方苍鹰的第h维量子位置。表示第k次迭代猎物的第h维量子位置,是被第i只量子北方苍鹰捕食的猎物。τ是[0,1]之间的随机数,χ随机取值1或2。
[0072]
利用量子旋转门更新第i只量子北方苍鹰个体的第h维量子位置:通过量子位置测量得到位置然后计算的目标函数值并分类讨论,如果支配则保持结果不变;否则,令具体如下:
[0073]
步骤七,在追逃阶段更新量子北方苍鹰的量子位置。
[0074]
在二阶段,量子北方苍鹰攻击猎物后,猎物会试图逃跑,这时将持续追逃猎物。由于北方苍鹰的高速飞行,它几乎可以追到任何猎物并捕猎。这种行为模拟提高了算法的局部搜索能力。假设这种狩猎的攻击半径为r,则得到第i只量子北方苍鹰的第h维量子旋转角:其中攻击半径τ为[0,1]之间的随机数。
[0075]
利用量子旋转门更新第i只量子北方苍鹰个体的第h维量子位置:然后计算的目标函数值并分类讨论,如果支配则保持结果不变,否则,令具体如下:
[0076]
步骤八,判断是否达到量子北方苍鹰的最大迭代次数k2,是则终止迭代,将非支配等级为1的量子北方苍鹰位置对应为任务分配矩阵,并作为抢灾救援规划的任务分配结果输出;否则令k=k+1,继续执行步骤四。
[0077]
下面结合具体参数给出实施例并对本发明性能进行说明,将多目标量子北方苍鹰优化方法记为moqngo,多目标量子磷虾方法记为moqkh。为了验证基于量子北方苍鹰机制的多目标无人机救援方法的性能,本发明进行了四组仿真实验测试。设置种群规模为k1=100,最大迭代次数k2=300,飞行代价影响因子γ=0.1,伤亡代价影响因子μ=0.3,ξ1=150,ξ2=500,ξ3=1,ξ4=2,维数s=m
×
n,无人机基地位置为(0,0),无人机航程约束d=1000,重伤状态的灾民救援期限为12h,轻伤状态的灾民救援期限为24h,口渴状态的灾民救援期限为96h,饥饿状态的灾民救援期限为120h,无人机飞行速度为20单位/h。仿真实验中,需满足两个假设:每架无人机携带的救援物资满足灾区使用,以及无人机在为灾民提供物资的时间忽略不计。表一给出了灾区群众的中心位置。
[0078]
表一 灾区群众中心位置
[0079][0080]
灾区群众状态如下:
[0081]
表二 灾民状态
[0082][0083][0084]
在第一组实验中,n=4架无人机执行t=9个救援任务,共计378个灾民,其中t1~4灾区重伤状态灾民居多,而重伤灾民救援期限最短,生命垂危,因此要优先救援。图2是以无人机总飞行代价和灾民伤亡代价为优化目标时,利用moqngo和moqkh方法得到的非支配解
对比图。从图中可以看到,moqngo方法产生的最优解在总飞行代价上略小于moqngo方法产生的最优解,同时做到了0伤亡代价完成救援任务。救援任务分配方案如表3所示:
[0085]
表3 pareto前端中部分个体对应的任务分配方案
[0086][0087]
在第二组实验中,n=6架无人机执行t=14个救援任务,共计586个灾民,其中t1~t4、t13和t14灾区重伤状态灾民居多,t11中轻伤状态灾民居多,在救援任务规划中,优先救援重伤灾民居多的地区,其次是轻伤灾民居多的地区。moqngo和moqkh方法得到的非支配解如图3所示,由于重伤状态灾区数目与无人机数目相等,且救援任务较少,故只产生一个最优解,可以看出,moqngo方法产生的最优解同样实现了0伤亡代价完成救援任务,并且可以支配moqkh方法产生的最优解。救援任务分配方案如表4所示:
[0088]
表4 pareto前端中部分个体对应的任务分配方案
[0089][0090]
在第三组实验中,n=8架无人机执行t=18个救援任务,共计748个灾民,其中t1~t4、t13、t14和t18灾区重伤状态灾民居多,t11和t15中受伤灾民居多。moqngo和moqkh方法得到的非支配解如图4所示。同样可以看出,moqngo方法产生的最优解可以支配moqkh方法产生的最优解。救援任务分配方案如表5所示:
[0091]
表5 pareto前端中部分个体对应的任务分配方案
[0092][0093]
在第四组实验中,n=10架无人机执行t=25个救援任务,共计994个灾民,其中t1~t4、t13、t14、t18、t19和t23灾区重伤状态灾民居多,其次是t11、t15、t20和t25受伤灾民居多。moqngo和moqkh方法得到的非支配解如图5所示。总体来看,四组实验中,moqngo方法产生的最优解均可以支配moqkh方法产生的最优解,并且救援任务分配的更均匀合理。救援任务分配方案如表6所示:
[0094]
表6 pareto前端中部分个体对应的任务分配方案
[0095][0096]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1