一种多无人机区域协同监控系统及方法与流程
1.本发明涉及无人机技术领域,尤其涉及一种多无人机区域协同监控系统及方法。
背景技术:
2.近些年来,随着无人机产业的飞速发展,无人机领域受到了越来越多的关注,并且由于其越来越低的造价成本,使得其慢慢被广泛应用于各个领域中,尤其在森林救火、环境监测等领域较为突出;当前,无人机应用主要是通过控制单体无人机系统以实现对目标任务监测;但单体无人机系统只能提供有限的操作功能,其任务处理能力已经捉襟见肘,远远不能满足复杂飞行任务的需求,而且单体无人机系统在面对较大监测区域时其续航能力难以支撑;相较于单无人机系统,多无人机协同系统能够更大的覆盖区域,且具备高并发解决的能力,能够满足大规模监测任务;然而多无人机协同系统在执行任务时也存在诸多问题,如何解决这些问题,以使多无人机协同系统得以完美执行任务,已成为当下研究重点;
3.目前,现有的多无人机协同系统方式主要通过对每架无人机进行飞行路线预设以实现任务执行,例如:中国专利号cn112146615b公开了基于多架无人机的边坡监测方法,该发明虽然通过对每架无人机飞行路线进行预设实现了对边坡的监测,但其对每架无人机一一进行飞行路线预设不仅费时费力,且难以应用于实际飞行场景,而且当受到外界因素干扰,会引起无人机之间相碰撞或脱离监测区域等问题的发生,其也无法实现自我调整;此外,多无人机协同系统的信号延迟和干扰等通信因素,也制约着多无人机协同系统的实际应用;为此,我们提出一种多无人机区域协同监控系统及方法。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种多无人机区域协同监控系统及方法。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种多无人机区域协同监控系统,包括地面控制中心、一架主无人机以及多架从无人机;所述地面控制中心包括区域地理围栏构建模块、编号处理模块、路径规划模块、相对坐标模式设定模块、任务调度模块和无线通信模块;
7.所述区域地理围栏构建模块用于对待监测目标区域进行一个主监控区域地理围栏和多个子监控区域地理网格的构建;
8.所述编号处理模块用于对所述多个子监控区域地理网格进行顺序编号,以得到网格围栏序号;
9.所述编号处理模块还用于对所述一架主无人机以及多架从无人机进行任务编号,并同所述网格围栏序号进行一一对应;
10.所述路径规划模块用于对网格围栏序号对应后的主无人机进行飞行路线规划,形成网格内飞行路线;
11.所述相对坐标模式设定模块用于将每一个在子监控区域地理网格中的无人机与
在相邻多个子监控区域地理网格的多个无人机进行相对坐标设定,形成相对坐标模式;
12.所述任务调度模块用于根据所述网格围栏序号和任务编号,将一架主无人机以及多架从无人机调度至待监测目标区域进行协同工作;
13.所述无线通信模块用于一架主无人机以及多架从无人机进行远程通信;
14.所述一架主无人机以及多架从无人机均包括监测模块、位置检测模块和通信模块;所述多架从无人机还包括微处理及控制模块;
15.所述一架主无人机用于通过所述监测模块并根据所述网格内飞行路线在对应子监控区域地理网格中进行飞行监测,获取目标区域监测信息;
16.所述多架从无人机用于通过所述监测模块并根据相对坐标模式在对应子监控区域地理网格中进行飞行监测,获取目标区域监测信息。
17.进一步地,所述区域地理围栏构建模块的具体构建过程包括:
18.获取待监测目标区域的电子地图;
19.利用一个大正多边形将所述电子地图中待监测目标区域进行框选,并将大正多边形作为待监测目标区域的虚拟地理围栏,并进行构建,得到一个主监控区域地理围栏;
20.利用多个小正多边形对所述一个主监控区域地理围栏进行网格划分,形成多个子监控区域地理网格。
21.进一步地,所述一架主无人机在对待监测目标区进行飞行监测时,其处于一个主监控区域地理围栏和多个子监控区域地理网格的中心位置。
22.进一步地,所述位置检测模块用于根据一个主监控区域地理围栏和多个子监控区域地理网格检测自身是否脱离任务区域边界,以得到检测信息;所述位置检测模块还内置有gps定位单元,用于实时获取主无人机的坐标信息;所述通信模块用于采用多跳式无线自组网方式实现主从无人机及与地面控制中心之间的相互通信。
23.进一步地,所述微处理及控制模块用于多架从无人机根据相对坐标模式进行位置飞行计算,以实现与主无人机的协同工作。
24.进一步地,所述微处理及控制模块还用于获取检测信息,若所述检测信息显示无人机脱离任务区域边界,则获取其他相邻无人机的坐标,并根据相对坐标模式控制无人机进行飞行调整。
25.一种多无人机区域协同监控方法,该区域协同监控方法具体如下:
26.步骤一:区域地理围栏构建,获取待监测目标区域的电子地图,根据所述电子地图构建一个主监控区域地理围栏和多个子监控区域地理网格,同时对多个子监控区域地理网格进行编号,得到网格围栏序号;
27.步骤二:飞行任务处理,根据所述多个子监控区域地理网格的数量进行对一架主无人机、多架从无人机进行任务编号,并同所述网格围栏序号进行一一对应,同时对所述一架主无人机进行飞行路线规划,并将每个子监控区域地理网格的相邻子监控区域地理网格进行相对坐标绑定,形成相对坐标模式;
28.步骤三:区域协同监测,根据任务编号将所述一架主无人机及多架从无人机派遣至待监测目标区域中的多个子监控区域地理网格中,由一架主无人机根据飞行路线规划进行飞行监测,其他多架从无人机通过多跳式无线自组网方式进行通信,实时获取相邻子监控区域地理网格中无人机的坐标,并根据所述相对坐标模式进行协同运行,以实现区域协
同监测;
29.步骤四:监测过程控制,通过步骤一所述一个主监控区域地理围栏和多个子监控区域地理网格对区域协同工作中的一架主无人机及多架从无人机进行位置监督,当某一无人机触碰一个主监控区域地理围栏或多个子监控区域地理网格时,系统会发出警告,同时无人机会获取其他相邻无人机的坐标,并根据相对坐标模式回到正常飞行路线中。
30.相比于现有技术,本发明的有益效果在于:
31.本技术提出的一种多无人机区域协同监控系统及方法,其利用地理围栏技术划分多个监测区域网格,并通过对一个主无人机进行飞行线路规划,将其置于多个监测区域网格中心位置,同时利用相对坐标模式控制多个从无人机进行协同工作,其相较于现有的对每架无人机进行飞行路线规划的系统而言,其极大程度降低了对多架无人机进行飞行路线规划的成本,省时省力;而且本发明同时利用地理围栏技术对无人机进行边界监测,通过相对坐标模式进行调控,有利于避免无人机之间相碰撞或脱离监测区域等问题的发生;此外,本发明基于多跳式无线自组网方式实现主从无人机及与地面控制中心之间的相互通信,进而有利于保证无人机之间的信息通信,且有利于保证目标区域监测信息能被快速和顺利获取,从而有利于满足大规模监测任务。
附图说明
32.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
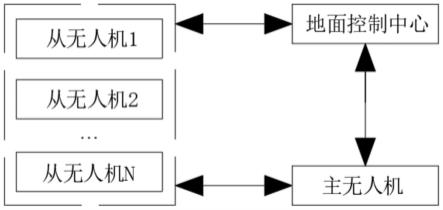
33.图1为本发明提出的一种多无人机区域协同监控系统的整体结构框图;
34.图2为本发明提出的一种多无人机区域协同监控方法的整体流程图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
36.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.在一个实施例中,参照图1,提供了一种多无人机区域协同监控系统,包括地面控制中心、一架主无人机以及多架从无人机;地面控制中心包括区域地理围栏构建模块、编号处理模块、路径规划模块、相对坐标模式设定模块、任务调度模块和无线通信模块;
38.区域地理围栏构建模块用于对待监测目标区域进行一个主监控区域地理围栏和多个子监控区域地理网格的构建;
39.具体的,该区域地理围栏构建模块的具体构建过程包括:
40.获取待监测目标区域的电子地图;
41.利用一个大正多边形将电子地图中待监测目标区域进行框选,并将大正多边形作为待监测目标区域的虚拟地理围栏,并进行构建,得到一个主监控区域地理围栏;
42.利用多个小正多边形对一个主监控区域地理围栏进行网格划分,形成多个子监控
区域地理网格。
43.在这需要说明一点的是:该大正多边形和小正多边形边数相互对应,其具体边数根据待监测目标区域边界确定,该待监测目标区域边界越复杂,则对应大正多边形和小正多边形边数就越多。
44.编号处理模块用于对多个子监控区域地理网格进行顺序编号,以得到网格围栏序号;
45.编号处理模块还用于对一架主无人机以及多架从无人机进行任务编号,并同网格围栏序号进行一一对应;
46.路径规划模块用于对网格围栏序号对应后的主无人机进行飞行路线规划,形成网格内飞行路线;
47.相对坐标模式设定模块用于将每一个在子监控区域地理网格中的无人机与在相邻多个子监控区域地理网格的多个无人机进行相对坐标设定,形成相对坐标模式;
48.具体的,该相对坐标模式是指处于某一子监控区域地理网格的无人机根据相邻无人机进行相对坐标的飞行运动;假设一个无人机飞行路线坐标为(x1,y1,z1),(x1,y2,z3),
…
,(x2,y3,z4);根据相对坐标模式则相邻无人机的飞行路线则是(x10,y10,z10),(x11,y12,z13),
…
,(x22,y33,z44);
49.在这需要说明一点的是:每个无人机会依据编号最近的相邻无人机进行相对飞行;若最近的相邻无人机处于异常飞行状态(该异常飞行状态包括脱离任务区域边界),则依据编号第二近的相邻无人机进行相对飞行,依次类推;
50.任务调度模块用于根据网格围栏序号和任务编号,将一架主无人机以及多架从无人机调度至待监测目标区域进行协同工作;
51.无线通信模块用于一架主无人机以及多架从无人机进行远程通信;
52.一架主无人机以及多架从无人机均包括监测模块、位置检测模块和通信模块;多架从无人机还包括微处理及控制模块;
53.具体的,该一架主无人机在对待监测目标区进行飞行监测时,其处于一个主监控区域地理围栏和多个子监控区域地理网格的中心位置;
54.具体的,该位置检测模块用于根据一个主监控区域地理围栏和多个子监控区域地理网格检测自身是否脱离任务区域边界,以得到检测信息;位置检测模块还内置有gps定位单元,用于实时获取主无人机的坐标信息;通信模块用于采用多跳式无线自组网方式实现主从无人机及与地面控制中心之间的相互通信;
55.微处理及控制模块用于多架从无人机根据相对坐标模式进行位置飞行计算,以实现与主无人机的协同工作。
56.在一个实施例中,该微处理及控制模块还用于获取检测信息,若检测信息显示无人机脱离任务区域边界,则获取其他相邻无人机的坐标,并根据相对坐标模式控制无人机进行飞行调整。
57.一架主无人机用于通过监测模块并根据网格内飞行路线在对应子监控区域地理网格中进行飞行监测,获取目标区域监测信息;
58.多架从无人机用于通过监测模块并根据相对坐标模式在对应子监控区域地理网格中进行飞行监测,获取目标区域监测信息。
59.在一个实施例中,参照图2,提供了一种多无人机区域协同监控方法,该区域协同监控方法具体如下:
60.步骤一:区域地理围栏构建,获取待监测目标区域的电子地图,根据电子地图构建一个主监控区域地理围栏和多个子监控区域地理网格,同时对多个子监控区域地理网格进行编号,得到网格围栏序号;
61.步骤二:飞行任务处理,根据多个子监控区域地理网格的数量进行对一架主无人机、多架从无人机进行任务编号,并同网格围栏序号进行一一对应,同时对一架主无人机进行飞行路线规划,并将每个子监控区域地理网格的相邻子监控区域地理网格进行相对坐标绑定,形成相对坐标模式;
62.步骤三:区域协同监测,根据任务编号将一架主无人机及多架从无人机派遣至待监测目标区域中的多个子监控区域地理网格中,由一架主无人机根据飞行路线规划进行飞行监测,其他多架从无人机通过多跳式无线自组网方式进行通信,实时获取相邻子监控区域地理网格中无人机的坐标,并根据相对坐标模式进行协同运行,以实现区域协同监测;
63.步骤四:监测过程控制,通过步骤一一个主监控区域地理围栏和多个子监控区域地理网格对区域协同工作中的一架主无人机及多架从无人机进行位置监督,当某一无人机触碰一个主监控区域地理围栏或多个子监控区域地理网格时,系统会发出警告,同时无人机会获取其他相邻无人机的坐标,并根据相对坐标模式回到正常飞行路线中。
64.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1