一种面向无人集群的分布式动态路径规划方法与流程
1.本发明属于无人集群路径规划技术领域,特别是一种面向无人集群的分布式动态路径规划方法。该方法在无人集群各成员分别得到目标位置后,结合环境信息以及与其他成员的通信交互信息,实时规划出下一步的移动位置,从而完成由当前位置飞行到目标位置的任务。
背景技术:
2.随着人工智能技术的迅猛发展,无人机逐步朝着小型化、智能化方向发展,因其成本低、灵活性高、隐蔽性强,被广泛应用于战场侦察、联合攻击、应急救援等行动,已成为未来智能化、无人化作战的重要手段之一。鉴于单架无人机在续航能力、广域侦察搜索等方面的局限性,多架无人机协同组成无人集群执行任务成为当前无人机作战应用的重要模式。较之于单架无人机,无人集群具有明显的规模优势、协同优势等,可有效提高任务完成的可靠性。然而,实现无人集群高效协同的首要问题,即是如何科学合理地为无人集群进行路径规划。
3.当前,关于单架无人机路径规划的研究较多,然而面向无人集群的路径规划研究则相对较少。不同于单无人机路径规划,无人集群的路径规划除了考虑单机的可控飞行,各种威胁之外,还需考虑集群规模、功能结构、协同方式等带来的挑战,其本质上是一个复杂的大规模约束多目标优化问题。智能优化算法因其对优化问题的性质要求低、鲁棒性高,而被广泛应用于求解路径规划问题。
技术实现要素:
4.本发明在上述背景技术的基础上提出了一种面向无人集群的分布式动态路径规划方法。相较于传统的集群路径规划方法,本发明基于无人集群分布式决策架构,通过通信获取附近无人机的位置信息,采用改进的人工势场法路径规划方法,实时规划无人机的下一步移动位置,实现无人集群的动态路径规划过程。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种面向无人集群的分布式动态路径规划方法,在每架无人机上执行如下步骤:
7.步骤1,根据本无人机的飞行目标点建立引力场,根据环境中的障碍建立相应的障碍斥力场;
8.步骤2,在本无人机通信范围内获取集群中其他无人机的实时位置信息,为避免机间碰撞,基于这些位置信息,建立碰撞斥力场;
9.步骤3,本无人机的各个附近无人机根据自身的飞行目标点,分别生成一个与自身的飞行趋势反向成正比的附加力作用于所述本无人机;
10.步骤4,计算本无人机所受的各引力场、斥力场以及附加力的合力,确定本无人机下一步的运动方向;
11.步骤5,在确定本无人机运动方向后,基于本无人机的当前位置与飞行速度,计算
本无人机下一步的飞行航点;
12.步骤6,本无人机运动到下一步的飞行航点后,再次执行步骤1-5,实现动态路径规划。
13.进一步地,步骤1中建立的引力场u
att
(x)为:
[0014][0015]
其中,x=(x,y)为本无人机的位置,xg为本无人机的飞行目标点,k
att
为引力增益系数;
[0016]
本无人机受到的引力为引力场的负梯度。
[0017]
进一步地,步骤1中建立的障碍斥力场以及步骤2中建立的碰撞斥力场具有相同形式,表示如下:
[0018][0019]
其中,x=(x,y)为本无人机的位置,u
rep
(x)为斥力场,k
rep
是斥力增益系数,x0是障碍物或其他无人机的位置,ρ0为障碍物或其他无人机对本无人机的影响距离;
[0020]
本无人机受到的各个斥力为相应斥力场的负梯度。
[0021]
进一步地,作用于本无人机的所有k个附加力的合力f
sub
为:
[0022][0023]
其中,x=(x,y)为本无人机的位置,x
uavi
为第i个附近无人机的位置,k
sub
为附加力增益系数,为第i个附近无人机的速度,ρ为附近无人机对本无人机的影响距离。
[0024]
进一步地,步骤5中,本无人机下一步的飞行航点为:
[0025][0026]
其中,x
t
为本无人机的当前位置坐标,x
t+1
为本无人机下一步的飞行航点坐标,|f
total
|为本无人机所受合力的大小,v为本无人机的速度大小。
[0027]
本发明与现有技术相比具有以下优点:
[0028]
1、本发明提出的集群动态路径规划方法基于无人集群分布式决策架构,通过在每一架无人机上部署同一算法,对当前个体进行实时规划,避免了集中式决策带来的计算量大、耦合性差等弊端,使得无人集群的路径规划更为灵活,对不同环境的适应度更高。
[0029]
2、本发明在原有人工势场法提出的引力场和斥力场的基础上,对所需规划的无人机增加了两种斥力,由附近无人机生成斥力,以及根据附近无人机的运动趋势生成辅助斥力,可以有效地避免与其他无人机发生碰撞的风险。
附图说明
[0030]
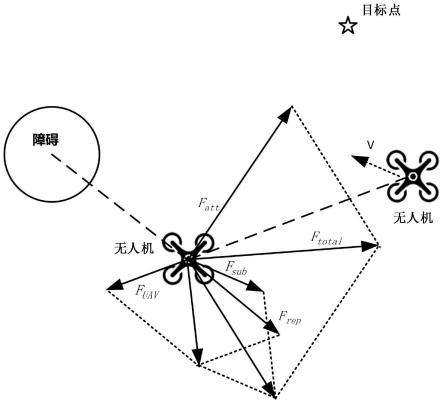
图1为本发明实施例中面向无人集群分布式动态路径规划方法的原理示意图;
[0031]
图2为本发明实施例中面向无人集群分布式动态路径规划方法的流程图。
具体实施方式
[0032]
下面结合附图和具体实施方式对本发明作进一步详细说明。
[0033]
如图1、图2所示,一种面向无人集群的分布式动态路径规划方法,具体实施步骤如下:
[0034]
步骤1,对无人机的飞行目标点及环境中的障碍建立相应的引力场和斥力场;
[0035]
步骤2,在无人机通信范围内可获知集群中其他无人机的实时位置信息,基于这些位置信息,为避免机间的碰撞问题,对附近无人机建立斥力场;
[0036]
步骤3,在无人集群动态路径规划过程中,通信获取到附近无人机的飞行目标点后,将附近无人机的飞行趋势(可用无人机当前速度作为表示方式)作为路径规划的考虑因素之一,在无人机路径规划时,除了步骤1、2所包含的力以外,由附近无人机分别生成一个与反向成正比的附加力f
sub
作用于无人机;
[0037]
步骤4,计算无人机所受以上力的合力,确定无人机下一步的运动方向;
[0038]
步骤5,在确定无人机运动方向后,基于当前位置与飞行速度,计算无人机下一步的飞行航点;
[0039]
步骤6,无人机运动到规划航点后,再次执行步骤1-5,实现无人集群的动态路径规划。
[0040]
步骤1中,目标位置与无人机之间的引力场为:
[0041][0042]
其中,x=(x,y)为无人机在环境中的位置,xg为无人机路径规划任务的目标,k
att
为引力增益系数。定义引力f
att
(x)为引力场的负梯度:
[0043][0044]
无人机与障碍物的斥力场函数定义为:
[0045][0046]
其中,k
rep
是斥力增益系数,x0是障碍物的位置,ρ0为障碍物对无人机的影响距离。当障碍物与无人机间的距离大于ρ0时,无人机不受障碍物的影响,当障碍物与无人机间的距离在ρ0范围之内时,障碍物对无人机产生斥力。斥力场的负梯度:
[0047][0048]
步骤2中,在传统人工势场法的基础上,将附近无人机的实时位置作为障碍点构建斥力作用于待规划无人机上,使得机间产生一定排斥力,保证集群个体之间互相避免碰撞
的问题。
[0049]
附近无人机作用在待规划无人机上的斥力为:
[0050][0051]
其中,x
uav
为附近无人机在环境中的位置,k
uav
为斥力增益系数,|x-x
uavi
|为本机与附近无人机的距离,ρ为无人机的安全距离。
[0052]
步骤3中,由于无人集群个体都处于动态移动的过程中,仅将附近无人机的当前位置作为规划依据不能很好地满足集群动态路径规划的需求,还应该考虑附近无人机的飞行趋势。为此,附近的每一架无人机都会生成一个与自身飞行趋势反向成正比的附加力f
sub
作用于无人机上进行部分调整,该附加力可以在一定程度上使得无人机的规划航点避免出现在其他无人机的飞行路线上,再次降低了无人集群间个体发生碰撞的机会,同时也提高了无人集群的飞行效率。
[0053]
无人机所受到的附加力如下:
[0054][0055]
其中,k
sub
为附加力增益系数,附近无人机的速度。
[0056]
步骤4中,计算无人机所受合力为:
[0057]ftotal
=f
att
+f
rep
+f
uav
+f
sub
[0058]
步骤5中,无人机下一步飞行航点为:
[0059][0060]
其中,x
t
为无人机当前位置坐标,x
t+1
为无人机下一步规划位置坐标,|f
total
|为无人机所受合力大小,v为无人机速度大小。
[0061]
总之,本发明提出了一种面向无人集群的分布式动态路径规划方法,该方法在无人集群各成员分别得到目标位置后,结合环境信息以及与其他成员的通信交互信息,实时规划出下一步的移动位置,从而完成由当前位置飞行到目标位置的任务。该方法在原始人工势场法的基础上,增加了两种辅助力作用于无人机上,可以有效地避免与其他无人机发生碰撞的风险,适用于分布式无人集群路径规划。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1