面向分数阶模型的负虚系统判别方法、系统及存储介质
transactions on automatic control,2008,53(4):1042-1046;m.mabrok,a.g.kallapur,i.r.petersen,and a.lanzon,“a generalized negative imaginary lemma and riccati-based static state-feedback negative imaginary synthesis,”systems&control letters,77:63
–
68,2015;以及m.a.mabrok,a.g.kallapur,i.r.petersen,and a.lanzon,“spectral conditions for negative imaginary systems with applications to nanopositioning,”ieee/asme transactions on mechatronics,19(3):895
–
903,2014等。
6.但是已有的判别方法存在以下局限性:已有的负虚定义、负虚判别及控制方法均只适用于整数阶系统,不适用于分数阶系统。
技术实现要素:
7.本发明所要解决的技术问题在于如何实现对分数阶负虚系统的判别。
8.本发明通过以下技术手段实现解决上述技术问题的:
9.本发明提出了一种面向分数阶模型的负虚系统判别方法,所述方法包括:
10.获取分数阶系统的矩阵输入,所述矩阵输入包括系统矩阵a、输入矩阵b、输出矩阵c和直接转移矩阵d;
11.基于所述分数阶系统的矩阵输入,在分数阶系统稳定且d=d
t
时判断是否存在hermitian矩阵p和半正定hermitian矩阵q满足矩阵不等式方程:
[0012][0013]
式中:x为矩阵p和矩阵q的正余弦表示,x
*
为x的复共轭转置,j为虚数单位,t为转置;
[0014]
若是,则确定所述分数阶系统为稳定分数阶负虚系统;
[0015]
若否,则确定所述分数阶系统不是分数阶负虚系统。
[0016]
本发明首次提出如何利用矩阵不等式条件判断一个分数阶系统是否满足分数阶负虚系统的方法,判别方法简单,实际编程实现容易,对多输入多输出系统有明显优势。
[0017]
进一步地,在所述分数阶系统为阶次(0,1)的分数阶系统时,即α∈(0,1),所述矩阵p和矩阵q的正余弦表示x为:
[0018][0019]
进一步地,在所述分数阶系统为阶次(1,2)的分数阶系统时,即α∈(1,2),所述矩阵p和矩阵q的正余弦表示x为:
[0020][0021]
进一步地,所述矩阵不等式方程的构建过程包括:
[0022]
对分数阶系统进行建模,得到基于状态空间方程的分数阶模型及传递函数矩阵,并将实有理整数阶负虚系统的定义作为分数阶负虚系统的定义;
[0023]
构建用于刻画分数阶系统曲线的代数方程,所述代数方程包括(0,1)阶次的代数方程和(1,2)阶次的代数方程;
[0024]
基于所述代数方程,利用广义kyp引理建立所述矩阵不等式方程。
[0025]
进一步地,所述构建用于刻画分数阶系统曲线的代数方程,所述代数方程包括(0,1)阶次的代数方程和(1,2)阶次的代数方程,包括:
[0026]
令λ=(jω)
α
,α∈(0,1),当ω∈[0,∞)时,λ所表示的曲线的集合为(0,1)阶次的代数方程,具体为:
[0027][0028]
令λ=(jω)
α
,α∈(1,2),当ω∈[0,∞)时,λ所表示的曲线的集合为(1,2)阶次的代数方程,具体为:
[0029][0030]
式中:re[λ]代表λ的实部,im[λ]代表λ的虚部,为复数域,当α∈(0,1)时,表示穿过一、三象限,斜率为的曲线,表示曲线限制为实轴以上的曲线;当α∈(1,2)时,表示穿过二、四象限,斜率为的曲线,表示将曲线限制为实轴以上的曲线,ψ,φ,ψ'为矩阵,其中:
[0031][0032][0033][0034]
进一步地,所述稳定分数阶负虚系统的定义为g(s)在右半闭区域内没有极点,且对所有ω》0满足j[g(jω)-g(jω)]≥0;
[0035]
所述基于所述代数方程,利用广义kyp引理建立所述矩阵不等式方程,包括:
[0036]
令所述代数方程对所有ω≥0满足j[c((jω)
α
i-a)-1
b-b
t
(-jωi-a
t
)-1ct
]≥0,等价于:
[0037][0038]
式中:h(λ)=(λi
n-a)-1
b,h
n+m
代表n+m维的hermitian矩阵;im为合适维度的单位矩阵;λ为(jω)
α
,属于曲线λ(φ,ψ)集合;
[0039]
根据广义kyp引理,等价于存在hermitian矩阵p和半正定hermitian矩阵q满足:
[0040][0041]
简化为存在hermitian矩阵p和矩阵q,其中q≥0满足:
[0042][0043]
式中:x为矩阵p和矩阵q的正余弦表示,x
*
为x的复共轭转置,j为虚数单位,t为转置。
[0044]
进一步地,所述分数阶系统包括分数阶粘弹阻尼器、分数阶rlc电路系统、二阶挠性结构系统及纳米定位仪系统。
[0045]
此外,本发明还提出了一种面向分数阶模型的负虚系统判别系统,所述系统包括:
[0046]
获取模块,用于获取分数阶系统的矩阵输入,所述矩阵输入包括系统矩阵a、输入矩阵b、输出矩阵c和直接转移矩阵d;
[0047]
判断模块,用于基于所述分数阶系统的矩阵输入,在分数阶系统稳定且d=d
t
时判断是否存在hermitian矩阵p和半正定hermitian矩阵q,满足矩阵不等式方程:
[0048][0049]
式中:x为矩阵p和矩阵q的正余弦表示,x
*
为x的复共轭转置,j为虚数单位,t为转置;
[0050]
确定模块,用于在所述判断模块输出结果为是时,确定所述分数阶系统为稳定分数阶负虚系统;以及用于在所述判断模块输出结果为否时,确定所述分数阶系统不是分数阶负虚系统。
[0051]
此外,本发明还提出了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如上所述的面向分数阶模型的负虚系统判别方法。
[0052]
此外,本发明还提出了一种状态反馈控制器,采用如上所述的面向分数阶模型的负虚系统判别方法设计。
[0053]
本发明的优点在于:
[0054]
(1)本发明首次提出如何利用矩阵不等式条件判断一个分数阶系统是否满足分数阶负虚系统的方法,判别方法简单,实际编程实现容易,对多输入多输出系统有明显优势。
[0055]
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0056]
图1是本发明一实施例中面向分数阶模型的负虚系统判别方法的流程示意图;
[0057]
图2是本发明一实施例中矩阵不等式方程的构建流程示意图;
[0058]
图3是本发明一实施例中(0,1)阶次分数阶系统的分数阶曲线;
[0059]
图4是本发明一实施例中(1,2)阶次分数阶系统的分数阶曲线;
[0060]
图5是本发明一实施例中分数阶粘弹阻尼器示意图;
[0061]
图6是本发明一实施例中粘弹系统g1(s)的曲线轨迹图;
[0062]
图7是本发明一实施例中分数阶rlc电路系统结构图;
[0063]
图8是本发明一实施例中rlc电路系统g2(s)的曲线轨迹图;
[0064]
图9是本发明一实施例中的曲线轨迹图;
[0065]
图10是本发明一实施例中面向分数阶模型的负虚系统判别系统的结构示意图。
具体实施方式
[0066]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0067]
如图1所示,本发明第一实施例提出了一种面向分数阶模型的负虚系统判别方法,所述方法包括以下步骤:
[0068]
s10、获取分数阶系统的矩阵输入,所述矩阵输入包括系统矩阵a、输入矩阵b、输出矩阵c和直接转移矩阵d;
[0069]
s20、基于所述分数阶系统的矩阵输入,在分数阶系统稳定且d=d
t
时判断是否存在hermitian矩阵p和半正定hermitian矩阵q满足矩阵不等式方程,若是则执行步骤s30,若否则执行步骤s40,其中,矩阵不等式方程表示为:
[0070][0071]
式中:x为矩阵p和矩阵q的正余弦表示,x
*
为x的复共轭转置,j为虚数单位,t为转置;
[0072]
s30、确定所述分数阶系统为稳定分数阶负虚系统;
[0073]
s40、确定所述分数阶系统不是分数阶负虚系统。
[0074]
本实施例提出如何利用矩阵不等式条件判断一个分数阶系统是否满足分数阶负虚系统的方法,判别方法简单,实际编程实现容易,对多输入多输出系统有明显优势。
[0075]
在一实施例中,在所述分数阶系统为阶次(0,1)的分数阶系统时,即α∈(0,1),所
述矩阵p和矩阵q的正余弦表示x为:
[0076][0077]
在一实施例中,在所述分数阶系统为阶次(1,2)的分数阶系统时,即α∈(1,2),所述矩阵p和矩阵q的正余弦表示x为:
[0078][0079]
在一实施例中,如图2所示,所述矩阵不等式方程的构建过程包括:
[0080]
s1、对分数阶系统进行建模,得到基于状态空间方程的分数阶模型及传递函数矩阵,并将实有理整数阶负虚系统的定义作为分数阶负虚系统的定义。
[0081]
对于阶次为(0,1)或(1,2)的齐次分数阶系统,考虑(a,b)能控,(a,c)能观的矩阵输入,建立基于状态空间方程的分数阶模型为:
[0082][0083]
式中:x(t)∈rn是伪状态变量,w(t)∈rm是输入向量,y(t)∈rm是输出向量,a∈rn×n是状态矩阵,b∈rn×m是输入矩阵,c∈rm×n是输出矩阵,d∈rm×m是直接转移矩阵,rn×m代表n
×
m维的实矩阵,m≤n,d
α
x(t)为x(t)的α阶caputo导数。
[0084]
通过一个拉普拉斯变换,考虑分数阶微分的caputo定义,可得到分数阶模型表达式(1-1)的传递函数矩阵为:
[0085]
g(s)=c(s
α
i-a)-1
b+d,
[0086]
式中:α为分数阶系统的阶次,0《α《2;α=1时,为整数阶系统;i代表具有合适维度的单位矩阵,a-1
代表矩阵a的逆。
[0087]
为了避免负虚系定义的概念混淆和负虚系统定义的统一,本实施例中将伪有理分数阶负虚系统定义与实有理整数阶负虚系统定义相同,具体为:
[0088]
定义1:分数阶系统(1-1)是负虚的如果满足以下条件:
[0089]
(1)g(s)在右半闭区域内没有极点;
[0090]
(2)对所有ω∈(0,∞),j[g(jω)-g
*
(jω)]≥0。
[0091]
其中:g
*
(jω)代表g(jω)的复共轭转置,j为虚数单位,a》(≥)0代表a为正定(半正定)对称矩阵。
[0092]
条件(1)等价于系统是bibo稳定系统,如果系统是能控能观的,即(a,b,c,d)是系统的最小实现,则系统bibo稳定等价于系统是渐进稳定的,等价于a的特征值均在稳定区域内,即
[0093]
条件(2)可得出,对于ω=0,j[g(jω)-g
*
(jω)]=0,所以对于ω∈[0,∞),j[g(jω)-g
*
(jω)]≥0,其中ω=0时,j[g(jω)-g
*
(jω)]恒为0。因为条件(1)的稳定性要求,定义1中的分数阶负虚系统又可称为稳定分数阶负虚系统。
[0094]
s2、构建用于刻画分数阶系统曲线的代数方程,所述代数方程包括(0,1)阶次的代数方程和(1,2)阶次的代数方程。
[0095]
构建过程具体包括:
[0096]
命题1:令λ=(jω)
α
,α∈(0,1),当ω∈[0,∞)时,λ代表如图3所示曲线。
[0097]
图3所示曲线可有如下集合定义:
[0098][0099]
其中,为复数域,有:
[0100][0101]
证明:令λ=(jω)
α
,α∈(0,1),当ω∈[0,∞)时,λ代表如图3所示的曲线。将公式(1-3)中的φ,ψ代入公式(1-2)中,得到如下集合:
[0102][0103]
式中:re[λ]代表λ的实部,im[λ]代表λ的虚部;当α∈(0,1)时,代表穿过一、三象限,斜率为的曲线;进一步将曲线限制为实轴以上的部分,即如图3所示的曲线。
[0104]
需要说明的是,对同一曲线的代数表达式,φ和ψ的选取不唯一,本实施例仅提供一种代数表达式。
[0105]
命题2:令λ=(jω)
α
,α∈(1,2)。当ω∈[0,∞)时,λ代表如图4所示的曲线。
[0106]
这条曲线可有如下集合定义:
[0107][0108]
其中,为复数域,有:
[0109][0110]
证明:令λ=(jω)
α
,α∈(1,2),当ω∈[0,∞)时,λ代表如图4所示的曲线。将公式(1-5)中的φ,ψ'代入公式(1-4)中,得到如下集合:
[0111][0112]
式中,当α∈(1,2)时,代表穿过二、四象限,斜率为的曲线;进一步将曲线限制为实轴以上的部分,即如图4所示的曲线。
[0113]
s3、基于所述代数方程,利用广义kyp引理建立所述矩阵不等式方程。
[0114]
具体地,对于α∈(0,1)情况:对于给定的能控能观输入(a,b,c,d),首先判断系统是否稳定,并判断是否存在hermitian矩阵p和半正定hermitian矩阵q满足以下矩阵不等式方程:
[0115][0116]
其中,且d=d
t
,a
t
代表矩阵a的转置。
[0117]
满足则系统为稳定分数阶负虚系统,不满足则系统不是稳定分数阶负虚系统。
[0118]
针对α∈(1,2)情况:对于给定的能控能观输入(a,b,c,d),同样首先判断系统是否稳定,并判断是否存在hermitian矩阵p和半正定hermitian矩阵q,满足以下矩阵不等式方程:
[0119][0120]
其中且d=d
t
。
[0121]
满足则系统为稳定分数阶负虚系统,不满足则系统不是稳定分数阶负虚系统。
[0122]
引理1:对于α∈(0,1)的情况,分数阶系统的模型表达式(1-1)是渐近稳定的当且
仅当存在正定hermitian矩阵p和q使得以下矩阵不等式成立
[0123]ejθ
pa+e-jθat
p+e-jθ
qa+e
jθ
aq《0(1-7)
[0124]
其中
[0125]
引理2:对于α∈(1,2)的情况,分数阶系统模型表达式(1-1)是渐近稳定的当且仅当存在正定hermitian矩阵p使得以下矩阵不等式成立:
[0126][0127]
引理3:(广义kyp引理):令矩阵a∈rn×n,b∈rn×m,θ∈h
n+m
,ψ∈h2,φ∈h2,集合λ定义为:
[0128][0129]
假设λ代表复平面的一条曲线。下面条件等价:
[0130]
(1)对于h(λ)=(λi
n-a)-1
b,下面条件成立:
[0131][0132]
(2)存在hermitian矩阵p和q,其中q》0满足:
[0133][0134]
如果(a,b)可控,令ω为矩阵a在λ中的特征值集合,则对任意λ属于λ中除去ω的集合,则上述等价条件中的严格不等式符号可替换为非严格不等式符号;代表矩阵的克罗内克(kronecker)乘积运算,hn代表n阶的hermitian矩阵集合。
[0135]
给出定理1及其证明过程:
[0136]
定理1:考虑分数阶系统的模型表达式(1-1),令(a,b,c,d)为m
×
m维正则伪有理传递函数矩阵g(s)=c(s
α
i-a)-1
b+d的一个最小实现,a∈rn×n,b∈rn×m,c∈rm×n,d∈rm×m,m≤n,α∈(0,1)。(a,b)能控,(a,c)能观,则g(s)是分数阶负虚系统当且仅当:
[0137]
(1)分数阶系统的模型表达式(1-1)是渐进稳定的,即满足引理1中的条件;
[0138]
(2)d=d
t
,且存在hermitian矩阵p和q,其中q≥0,满足以下矩阵不等式方程
[0139][0140]
其中
[0141]
证明过程为:根据分数阶负虚系统的定义,g(s)是分数阶负虚系统等价于g(s)在右半闭区域内没有极点,且对所有ω》0满足j[g(jω)-g(jω)]≥0。因为(a,b,c,d)是g(s)的一个最小实现,定理1中的条件(1)等价于g(s)在右半闭区域内没有极点,则定义1中的条件1得证。
[0142]
下面证明定义1中的条件2:
[0143]
对所有ω》0满足j[g(jω)-g(jω)]≥0;
[0144]
等价于d=d
t
,且对所有ω》0满足其中
[0145]
等价于d=d
t
,且对所有ω≥0满足j[c((jω)
α
i-a)-1
b-b
t
(-jωi-a
t
)-1ct
]≥0。
[0146]
令λ(ω)=(jω)
α
,α∈(0,1),代表命题1中的曲线(1-2)λ(φ,ψ),所以选取φ,ψ为命题1中公式(1-3)中的φ,ψ,对所有ω≥0满足j[c((jω)
α
i-a)-1
b-b
t
(-jωi-a
t
)-1ct
]≥0,等价于:
[0147][0148]
其中,h(λ)=(λi
n-a)-1
b,λ=(jω)
α
[0149]
根据广义kyp引理,(1-12)式等价于存在hermitian矩阵p和q,其中q≥0,满足:
[0150][0151]
式(1-13)中的φ,ψ为命题1中公式(1-3)中的φ,ψ,in为n阶单位矩阵。
[0152]
整理可得等价于存在hermitian矩阵p和q,其中q≥0满足
[0153][0154]
化简为存在hermitian矩阵p和q,其中q≥0,满足:
[0155][0156]
其中,
[0157]
至此,定义1中的条件2得证。
[0158]
给出定理2及其证明过程:
[0159]
定理2:考虑分数阶系统的模型表达式(1-1),令(a,b,c,d)为m
×
m维正则伪有理传递函数矩阵g(s)=c(s
α
i-a)-1
b+d的一个最小实现,a∈rn×n,b∈rn×m,c∈rm×n,d∈rm×m,m≤n,α∈(1,2);(a,b)能控,(a,c)能观。则g(s)是分数阶负虚系统当且仅当
[0160]
(1)分数阶系统的模型表达式(1-1)是渐进稳定的,即满足引理2中的条件;
[0161]
(2)d=d
t
,且存在hermitian矩阵p和q,其中q≥0,满足以下矩阵不等式方程:
[0162][0163]
其中,
[0164]
定理2证明过程与定理1的证明过程思路相似,将定理1证明中的曲线替换为命题2
中的曲线表达即可,即ψ和φ替换为命题2中公式(1-5)中的ψ'和φ,即可得证。
[0165]
在一实施例中,所述分数阶系统包括但不限于分数阶粘弹阻尼器、分数阶rlc电路系统、二阶挠性结构系统及纳米定位仪系统。
[0166]
为了检验本实施例提出的面向分数阶模型的负虚系统判别方法的有效性和实用性,进行一个四维粘弹系统和一个三维电路系统的仿真实验:
[0167]
仿真一:考虑如下分数阶微分方程代表的一类粘弹系统,粘弹阻尼器如图5所示,粘弹系统公式表示为:
[0168][0169]
x(0)=a1,
[0170]
其中,m,γ,和k分别代表粘弹系统的质量,阻尼系数和弹性系数;x(t)是粘弹系统的位移函数;u(t)为输入信号;为位移函数x(t)的α阶caputo导数。
[0171]
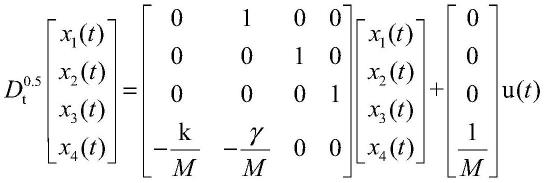
选取状态变量x1(t)=x(t),阶次α=0.5,有:
[0172][0173]
式中:k为粘弹系统的弹性系数,γ为粘弹系统的阻尼系数,u为输入,m为粘弹系统的质量。
[0174]
选取x1(t)为输出信号,整理可得如下分数阶状态方程模型:
[0175][0176][0177]
设变量m=0.5,γ=0.5,k=1,分数阶系统具有如下参数:
[0178]
c=[1 0 0 0],d=0。
[0179]
第一步:判断系统以上输入参数是否满足定理1中的条件1,经matlab验证,存在矩阵:
[0180][0181]
q=p
*
》0
[0182]
式中:j是虚数单位,p
*
是p的复共轭转置。
[0183]
使得定理1中条件1成立,所以该分数阶粘弹系统是稳定的。
[0184]
系统矩阵a的特征值为:0.8498
±
1.0082j,-0.8498
±
0.6543j,均在稳定区域内。
[0185]
第二步:判断系统以上输入参数是否满足定理1中的条件2,经matlab中yalmip工具箱验证,存在矩阵:
[0186][0187][0188]
使得定理1中条件2成立,综上根据定理1可得该粘弹系统满足分数阶负虚系统。该粘弹系统的传递函数为:
[0189][0190]
g1(s)的曲线轨迹如图6所示,满足对所有ω∈[0,∞)。
[0191]
仿真二:考虑如图7所示的分数阶rlc电路系统。
[0192]
其中,ri,i=1,
…
,5为给定的电阻,l1,l2为给定的电感,c为给定的电容,ik,k=1,
…
,3是电流,e为给定的电压源。为电流ik的α阶caputo导数,为电压u的β阶caputo导数。根据kirchhoff定理写出如下电路方程:
[0193][0194][0195][0196]
(r2+r4)i1+(r4+r5)i
2-(r2+r3+r4+r5)i3=0
[0197]
选取i1,i2,u为状态变量,e为输入变量,i1为输出,令r1=r2=r3=r4=r5=1,c=2,l1=l2=1,α=β=0.5。整理可得如下分数阶状态方程模型:
[0198][0199][0200]
第一步:判断该分数阶rlc电路系统以上输入参数是否满足定理1中的条件1,经验证系统矩阵a的特征值为:-0.5
±
0.8660j,-2,均在稳定区域内,显然满足定理1中条件1,所以该分数阶rlc电路系统是稳定的。
[0201]
第二步:判断系统以上输入参数是否满足定理1中的条件2,经matlab中yalmip工具箱验证,存在矩阵:
[0202][0203][0204]
使得定理1中条件2成立,综上根据定理1可得该rlc系统满足分数阶负虚系统,其传递函数为:
[0205][0206]
g2(s)的负虚频域响应条件的曲线轨迹如图8所示,满足对所有ω∈[0,∞)。
[0207]
仿真三:
[0208]
考虑如下分数阶系统
[0209][0210]
以下为具体实施步骤:
[0211]
步骤1:输入为:c=(240),d=-1,其中(a,b)能控,(a,c)能观,a是hurwitz的。
[0212]
步骤2:验证给定的输入参数是否存在矩阵p,q满足定理1中的条件2,利用matlab的yalmip求解得到一组解为:
[0213][0214][0215]
同时d=d
t
,定理1中条件2满足,系统(1-18)为分数阶负虚系统。
[0216]
进一步,系统(1-18)的传递函数为图9展示了ω∈[0,∞)的曲线轨迹,从图9可以看出,对所有ω∈[0,∞),
[0217]
此外,本发明第二实施例提出了一种面向分数阶模型的负虚系统判别系统,所述系统包括:
[0218]
获取模块10,用于获取分数阶系统的矩阵输入,所述矩阵输入包括系统矩阵a、输入矩阵b、输出矩阵c和直接转移矩阵d;
[0219]
判断模块20,用于基于所述分数阶系统的矩阵输入,在分数阶系统稳定且d=d
t
时判断是否存在hermitian矩阵p和半正定hermitian矩阵q满足矩阵不等式方程:
[0220][0221]
式中:x为矩阵p和矩阵q的正余弦表示,x
*
为x的复共轭转置,j为虚数单位,t为转置;
[0222]
确定模块30,用于在所述判断模块输出结果为是时,确定所述分数阶系统为稳定分数阶负虚系统;以及用于在所述判断模块输出结果为否时,确定所述分数阶系统不是分数阶负虚系统。
[0223]
本实施例提出如何利用矩阵不等式条件判断一个分数阶系统是否满足分数阶负虚系统的方法,判别方法简单,实际编程实现容易,对多输入多输出系统有明显优势。
[0224]
在一实施例中,在所述分数阶系统为阶次(0,1)的分数阶系统时,即α∈(0,1),所述矩阵p和矩阵q的正余弦表示x为:
[0225][0226]
在一实施例中,在所述分数阶系统为阶次(1,2)的分数阶系统时,即α∈(1,2),所述矩阵p和矩阵q的正余弦表示x为:
[0227][0228]
在一实施例中,所述系统还包括矩阵不等式方程构建模块,具体包括:
[0229]
建模单元,用于对分数阶系统进行建模,得到基于状态空间方程的分数阶模型及传递函数矩阵,并将实有理整数阶负虚系统的定义作为分数阶负虚系统的定义;
[0230]
代数方程建立单元,用于构建用于刻画分数阶系统曲线的代数方程,所述代数方程包括(0,1)阶次的代数方程和(1,2)阶次的代数方程;
[0231]
不等式方程建立单元,用于基于所述代数方程,利用广义kyp引理建立所述矩阵不等式方程。
[0232]
在一实施例中,所述代数方程建立单元用于:
[0233]
令λ=(jω)
α
,α∈(0,1),当ω∈[0,∞)时,λ所表示的曲线的集合为(0,1)阶次的代数方程,具体为:
[0234][0235]
令λ=(jω)
α
,α∈(1,2),当ω∈[0,∞)时,λ所表示的曲线的集合为(1,2)阶次的代数方程,具体为:
[0236][0237]
式中:re[λ]代表λ的实部,im[λ]代表λ的虚部,为复数域,当α∈(0,1)时,表示穿过一、三象限,斜率为的曲线,表示曲线限制为实轴以上;当α∈(1,2)时,表示穿过二、四象限,斜率为的曲线,表示将曲线限制为实轴以上,ψ,φ,ψ'为矩阵,其中:
[0238][0239][0240][0241]
在一实施例中,所述不等式方程建立单元用于:
[0242]
令所述代数方程对所有ω≥0满足j[c((jω)
α
i-a)-1
b-b
t
(-jωi-a
t
)-1ct
]≥0,等价于:
[0243]
[0244]
式中:h(λ)=(λi
n-a)-1
b,h
n+m
代表n+m维的hermitian矩阵集合,im为单位矩阵,λ为(jω)
α
属于曲线λ(φ,ψ)集合;
[0245]
根据广义kyp引理,等价于存在hermitian矩阵p和q,其中q≥0满足:
[0246][0247]
简化为存在hermitian矩阵p和q,其中q≥0满足:
[0248][0249]
需要说明的是,本发明所述面向分数阶模型的负虚系统判别系统的其他实施例或具有实现方法可参照上述各方法实施例,此处不再赘余。
[0250]
此外,本发明第三实施例还提出了一种状态反馈控制器,采用如上第一实施例所述的面向分数阶模型的负虚系统判别方法设计,所设计的状态反馈控制器具体为:
[0251]
u(t)=gx-1
x(t)
[0252]
其中,g和为实矩阵,且x可逆,α∈(0,1),g,p,q满足一定矩阵不等式条件,x(t)∈rn是伪状态变量。
[0253]
本实施例给出了具有一般性的状态反馈控制方法,根据判别分数阶负虚系统的相关矩阵不等式条件,设计一种使闭环满足分数阶负虚的状态反馈控制器,可确保控制器参数为实矩阵,对于一个不满足负虚性质的分数阶系统,将其转换为满足负虚性质且稳定的分数阶系统。
[0254]
此外,本发明第四实施例还提出了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上第一实施例所述的面向分数阶模型的负虚系统判别方法。
[0255]
需要说明的是,在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,“计算机可读介质”可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(ram),只读存储器(rom),可擦除可编辑只读存储器(eprom或闪速存储器),光纤装置,以及便携式光盘只读存储器(cdrom)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。
[0256]
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述
实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
[0257]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0258]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0259]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1