一种校园外卖配送系统及递进式三维空间路径规划方法
1.本发明涉及无人机配送技术,尤其涉及一种校园外卖配送系统及递进式三维空间路径规划方法。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。民用方面目前在航拍、农业、植保、自拍、快递运输、空难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域的应用,很大程度地拓展了无人机本身的用途。
3.中国专利cn 205809702 u公开了一种无人机物流系统,包括云端服务器、无人机、发货控制终端以及收货控制终端;收货控制终端与云端服务器无线连接,将需求信息无线发送至云端服务器;云端服务器与发货控制终端无线连接,云端服务器将需求信息无线发送至发货控制终端,发货控制终端确认该需求信息,并通过云端服务器发送飞行控制指令至无人机;无人机与云端服务器无线连接,并具有货物搭载投放装置,货物搭载投放装置与无人机的主控芯片电性连接,无人机根据飞行控制指令飞行至预设地点,货物搭载投放装置将货物投放至预设地点。该系统可通过无人机运送货物,节省成本,简化运送步骤。
4.在无人机起飞至到达投送点,再从投送点回飞至起飞点,整个过程都需要远程平台进行干预控制。在山区广阔等空间有监控需求,而且障碍物高度变化较小,对无人机自主调控需求较低。平台控制的装备成本很高,不适合在园区的外卖配送场景使用。
5.在各种园区里面,例如校园、厂区等等,面积不大,但是建筑物繁多。建筑物较高,而且相互距离不大。要求无人机有自主的调控和导航能力,目前无人机在园区外面配送的应用场景上,并没有相应的技术支持。
技术实现要素:
6.本发明目的在于提供一种校园外卖配送系统及递进式三维空间路径规划方法,以解决上述现有技术存在的问题。
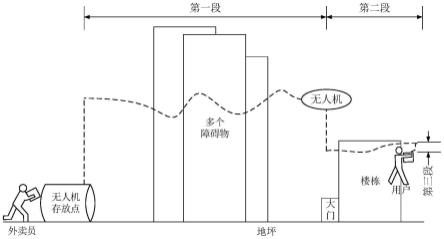
7.本发明所述一种递进式三维空间路径规划方法,将无人机起飞点至用户地址之间的路径分为三段进行递进式规划;
8.第一段路径规划步骤:获取校区巡航高度的平面地图、用户地址;以起飞点为原点建立坐标系,将高于所述巡航高度的建筑物标记为障碍物,用户地址所在楼栋大门在平面地图的投影坐标设为目标值,利用人工势场算法计算出当前最优路径到达楼栋大门上方;在楼栋大门上方下降至用户地址楼层的高度;
9.第二段路径规划步骤:通知用户打开手机gps功能,并获取用户手机gps信息;以无人机当前位置为原点重新建立坐标系,设置用户手机gps位置为目标位置,再次利用人工势场算法计算出当前最优路径到达用户所在点的一定范围之内;
10.第三段路径规划步骤:通知用户打开手机蓝牙功能,并基于蓝牙rssi信号三点定位法对手机进行最终定位,将离手机位置一定距离的地方设为无人机路径终点进行悬停;
11.所述用户地址包括所在楼栋大门信息、所在楼层信息及所在房间信息。
12.所述巡航高度为50m。
13.所述人工势场算法设有危险距离预警模块,利用sigmoid激活函数持续预测危险距离,当预测概率大于0.5时,令人工势场中的引力值等于斥力值。
14.所述人工势场算法设有防死锁模块,在无人机前进中出现路径不可用进入死锁时,对引力以角度形式增加一个增益系数。
15.所述人工势场算法中,引力常数为k(att),斥力常数为k(rep),满足关系:
16.斥力常数的自调节权重函数wf为:
[0017][0018]
其中,dist为移动路径的总距离,mindist为不同k(rep)值下的最小总距离,maxsafedist为不同k(rep)值下无人机与各障碍物最短距离中的最大值,safedis为无人机与各障碍物之间的最短距离;
[0019]
令wf最小时的k(rep)值为斥力常数的取值。
[0020]
在第二段路径规划中,无人机利用超声波实时计算与障碍物之间的距离,当小于预设值时将对应障碍物加入坐标系中,重新利用人工势场算法计算出当前最优路径。
[0021]
无人机悬停的终点离手机位置的一定距离为1m。
[0022]
本发明所述一种校园外卖配送系统,包括用户手机、多台无人机及无人机存放点;
[0023]
所述无人机存放点用于存放所述的多台无人机且对任一无人机进行充电;还用于获取外卖员输入的用户地址,匹配闲置的无人机并将用户地址及校区巡航高度的平面地图发送至匹配后的无人机上;
[0024]
所述匹配后的无人机在外卖员放入外卖后,通过所述递进式三维空间路径规划方法飞行至用户地址进行悬停;
[0025]
所述的用户手机用于与所述匹配后的无人机进行通讯。
[0026]
无人机对整个飞行轨迹进行记录,在外卖被取出后以原路线返回至所述无人机存放点。
[0027]
无人机在外卖被取出后上升至巡航高度两倍的高度,若判断出该高度在园区范围没有障碍物则直线返回至所述无人机存放点上方然后垂直降落;若存在障碍物则利用人工势场算法计算出返回所述无人机存放点的最优路径。
[0028]
本发明所述一种校园外卖配送系统及递进式三维空间路径规划方法,其优点在于,完全针对校区外卖投送场景而设定的路径规划,三段递进式的路径分配可以充分发挥电子地图、gps及蓝牙的各自优势。基于人工势场算法进大范围工作,基于蓝牙进行精准靠近,同时还能对危险距离进行实时预警。无需平台实时监控,系统设置成本大大降低,尤其适合毛利微薄的外卖行业使用。
附图说明
[0029]
图1是本发明所述递进式三维空间路径规划方法的工作过程立面示意图。
[0030]
图2是本发明所述递进式三维空间路径规划方法的工作过程平面示意图。
具体实施方式
[0031]
当前疫情环境大背景下,外卖不能送进校园,需要学生自取。采用无人机应用于校园外卖,采取人机协作配送方式,可以方便用户提取外卖,也可以避免外卖员与用户的直接接触。用户通过手机app下单,外卖员将外卖送到校园无人机存放点开始本发明公开的配送工作。
[0032]
首先匹配闲置的无人机,将用户地址信息传递给无人机,由无人机直接将外卖送至顾客宿舍窗台,顾客通过向无人机展示订单二维码或者直接通过人脸识别领取外卖。外卖取出后,无人机将会飞回存放点的充电桩进行充电。
[0033]
具体的工作流程如图1、2所示。
[0034]
第一段路径规划具体步骤:先获取校区巡航高度的高空平面地图,巡航高度可以根据不同校区环境进行配置,例如配置为50m。以起飞点为原点建立二维坐标轴,将高于50m的建筑物设置为障碍物,用户所在楼栋大门50m上空位置为目标值,采用人工势场算法,将障碍物位置点建立斥力势场,目标位置处建立引力势场。则其中,u(总体)是总势场;urep(q)是斥力势场;uatt(q)是引力势场;f(q)是引力与斥力的合力;是总势场的梯度;q是位置。
[0035]
urep(q)与无人机和目标点之间的距离成反比,uatt(q)与无人机和目标点之间的距离成正比。利用f(q)获得每一步长的方向,从而找出最优路径。
[0036]
人工势场算法的参数选取包括:k(att)、k(rep)、step、obstacles_dis、danger_dist。其中step是步长,取地图对应实际生活中2m的值;obstacles_dis是障碍物影响距离,取地图对应实际生活障碍物半径10倍的值;danger_dist是危险距离,避免出现与障碍物相撞的安全问题,取地图中对应实际生活中障碍物半径2倍的值;k(att)是引力常数,k(rep)是斥力常数,二者满足关系:
[0037]
由于斥力常数k(rep)是未知变量,为了计算k(rep)值,需要同时考虑安全性与路径最短。因此设置了dist和safedist两个辅助参数。dist是无人机从起点到终点走过的总距离;safedist是无人机与所有障碍物之间的最短距离。考虑让safedist尽可能的大的同时,保证dist尽可能的小,采用自调节权重函数wf进行自适应调整:
[0038]
其中,mindist为不同k(rep)值下的最小总距离,maxsafedist为不同k(rep)值下无人机与各障碍物最短距离中的最大值,safedis为无人机与各障碍物之间的最短距离。根据地图上障碍物多少,设置自调节方法,随着无人机地图的变化来自动更新k(rep)值。计算出自调节权重函数wf出现最小值时,对应的k(rep)值即为斥力常数的当前最优取值。
[0039]
人工势场算法中加入危险距离预警模块,采用sigmoid激活函数把danger_dist加权为1,dist加权为-1后进行预测。若预测概率大于0.5则激活紧急避险功能令人工势场中引力值等于斥力值。为了防止引力方向和斥力方向相反而令无人机死锁,人工势场算法设有防死锁模块,在无人机前进中出现路径不可用进入死锁时,对引力以角度形式增加一个
增益系数。
[0040]
到达大门50m正上空后根据用户app中填写的楼层信息,无人机调整到对应高度。
[0041]
第二段路径规划具体步骤:无人机发送信息给用户,要求其将手机gps打开,并且走至阳台。无人机获取此时手机gps经纬度信息,以无人机当前经纬度为原点,再次建立坐标系。设置手机位置为目标位置。再次利用人工势场计算最优路径。同时利用超声波实时计算无人机与障碍物之间的距离,当距离小于预设值时将障碍物位置加入坐标系中重新生成新的路径。最终实现无人机避障与路径规划,到达宿舍阳台一定范围之内。
[0042]
第三段路径规划具体步骤:由于民用gps精度存在米级误差,无人机此时与阳台仍然有一定的距离。虽然军用gps能高达厘米级误差,但是明显不能直接转用至民用领域,而且尤其不适用于校区外卖配送场景。此时,无人机通过连接用户蓝牙,获取更加精确的位置信息。采用基于蓝牙rssi信号的三点定位法来进行对手机定位,用手机模拟来信标,通过发送广播获得信标的rssi。只需获取三个信标分别计算信标与手机的距离,再利用三点定位算法即可获得手机的位置坐标。无人机获取手机位置后,为了避免直接撞击手机或用户而发生意外,飞至离手机一定距离后进行悬停,等待用户进行取餐操作。
[0043]
无人机在用户取餐完毕后需要自行返回存放点可至少基于以下两种方法实现:
[0044]
a)无人机在前面三个步骤的过程中,对于行进的轨迹进行记录,当无人机送达外卖之后,无人机按照之前的前行轨迹,原路返回。
[0045]
b)无人机飞行至100m高空,存放点预先给出100m高空的电子地图,判断如果无障碍物则起点与终点两点间直线返回。如果有障碍物,再利用如上所述的递进式三维空间路径规划方法计算出返回路径。
[0046]
对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1