一种车辆超车场景下紧急避让功能测试系统及测试方法与流程
1.本发明涉及汽车电气测试领域,尤其涉及一种车辆超车场景下紧急避让功能测试系统及测试方法。
背景技术:
2.汽车工业技术的不断发展,智能网联功能逐步成为目前各大汽车厂商产品新的竞争方向,汽车消费者也愈加青睐与认可智能网联功能的产品。其中,紧急车道保持功能(emergency lane keeping)也受到了广泛的关注,紧急车道保持功能可以分为:路沿场景下的紧急车道保持、对向会车场景下的紧急车道保持、后方超车场景下的紧急车道保持。由于厂商具体的配置及开发方案存在不同,通常来说紧急车道保持功能由上述子功能的一种或多种构成。此类驾驶辅助功能也给汽车厂商的测试验证工作带来了全新的挑战。目前,针对紧急车道保持等驾驶辅助功能的验证大多集中应用硬件在环的虚拟仿真方式进行验证与评价,此类测试方式虽然可通过上位机实现测试场景搭建与序列的执行。但因仿真模型是抽象化理想化的,因此测试结果无法完全替真实外部环境下的车辆表现。而现有的实车测试方案面临测试数据精度差、不同测试数据同步困难等的一系列问题,基于上述现状,亟需构建出一种基于激光雷达的超车场景下的紧急避让功能测试系统及方法。
技术实现要素:
3.为了解决现有技术存在的上述问题,本发明一种车辆超车场景下紧急避让功能测试系统及测试方法,测试人员可以以can数据的形式获取车辆控制器数据及外部车辆与自车的位置姿态信息,且两种数据可实时同步发送到上位机中进行显示与存储。相比于硬件在环虚拟仿真的测试验证方法,本发明由于测试环境是真实的外部道路环境,有效规避因仿真模型理想化所带来的不足,满足测试人员对于超车场景的紧急避让测试功能的验证需求,弥补了虚拟仿真测试的不足,完成超车场景下的紧急车道保持的功能测试验证与评价,优化了该功能的测试质量。
4.本发明的目的是通过以下技术方案实现的:
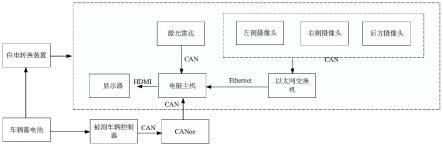
5.本发明首先提供一种车辆超车场景下紧急避让功能测试系统,包括车载供电装置、激光雷达、行车摄像头、上位机、被测车辆控制器;行车摄像头信息经以太网交换机与上位机通讯连接;激光雷达探测位置姿态信息并处理成500kb can信号上传至上位机;被测车辆控制器通过can信号与上位机通讯连接;上位机电脑主机通过hdmi信号线与显示器连接;上位机分别接收行车摄像头采集的视频信号、激光雷达探测位置姿态信息以及被测车辆控制器的can信号,进行同步存储并通过显示器显示。
6.进一步地,所述行车摄像头包括左侧摄像头、右侧摄像头、后方摄像头;被测车辆两侧后视镜下方安装左、右侧摄像头,且拍摄方向为斜后方;被测车辆后风挡玻璃上方安装后向视频摄像头;各摄像头用以太网的输出方式汇总到交换机后发送到上位机中。
7.进一步地,所述激光雷达安装到自车后保险杠正中央。
8.进一步地,所述车载供电装置包括车辆蓄电池、供电装换装置,车辆蓄电池与被测车辆控制器电性连接,车辆蓄电池通过供电转换装置与所述上位机电脑主机、激光雷达、行车摄像头以及显示器连接。
9.本发明同时提供一种车辆超车场景下紧急避让功能测试系统的测试方法,包括以下步骤:
10.步骤一、测试系统设备硬件连接;
11.步骤二、测试系统硬件接连完毕后,进行测试系统软件配置;
12.步骤三、设置测试用例,测试用例由车辆运动状态、外部环境条件两部分构成,将车辆运动状态要素与外部环境状态要素进行匹配,逐条生成具体测试项,将测试项汇总生成测试用例;
13.步骤四、测试用例生成完毕后,开始测试执行工作:根据测试用例逐条进行测试验证并记录各测试项的结果,采集被测车辆控制器的can信号与激光雷达输出的两车位置信息;
14.步骤五、每条测试用例测试执行完成后,按照用例编号存储对应的数据,依据系统功能指标及性能要求与实际测试结果进行分析比较。
15.进一步地,所述步骤二系统软件配置包括:
16.配置行车摄像头,在电脑网络设置本地连接中配置摄像头相同的ip地址;
17.配置激光雷达,在电脑网络设置本地连接中配置激光雷达相同的ip地址;
18.驾驶被测车辆行驶到公共直线道路,打开激光雷达界面观察界面光点是否与系统界面的网格保持平行,校正激光雷达安装角度;
19.通过上位机将被测车辆长宽高以及激光雷达与被测车辆相对位置信息进行配置。
20.进一步地,所述步骤三设置测试用例中,车辆运动状态为被测车辆的运动状态,其包括车辆档位状态、车辆行驶姿态以及车速;
21.车辆档位包括d/n/m/s不同档位;车辆行驶姿态包括直行、左侧快/慢偏、右侧快/慢偏;车速选取25km/h、35km/h、45km/h、55km/h。
22.进一步地,所述步骤三设置测试用例中,外部环境状态为被测车辆运行的实际外部环境,包括从车车速、道路曲率;
23.从车车速须大于自车车速,将从车车速设定为自车车速+5km/h、+10km/h、+15km/h、+20km/h;
24.道路曲率包括右/左弯与直道。
25.进一步地,所述步骤四中,采集的被测车辆控制器的can信号包括自车的车速信号、自车的档位信号、自车方向盘手力矩信号、自车elk工作状态信号。
26.进一步地,所述步骤四中,激光雷达输出的两车位置信息包括两车横向干预时刻的横向速度、加速度、碰撞距离、ttc。
27.本发明具有以下有益效果:
28.本发明一种车辆超车场景下紧急避让功能测试系统及测试方法,可在真实外部道路中,获得超车场景的紧急车道保持功能测试数据,且实现数据精度高、信息的同步显示及存储。高精度测试数据除两车实时的纵/横向距离、纵/横向速度、加速度外,还可以直接通过上位机直接导出被测车辆与后方目标车的碰撞ttc信息,减轻了测试人员后期处理数据
的工作负荷,提高了超车场景下紧急车道保持功能的测试质与效率量。
附图说明
29.图1为本发明实施例1所述的一种车辆超车场景下紧急避让功能测试系统框架图;
30.图2为本发明实施例2所述的一种车辆超车场景下紧急避让功能测试系统测试方法后方超车场景示意图;
31.图3为本发明实施例2所述的一种车辆超车场景下紧急避让功能测试系统测试方法测试用例示意图。
具体实施方式
32.以下结合附图及实施例进一步说明本发明的技术方案:
33.实施例1
34.如图1所示,一种车辆超车场景下紧急避让功能测试系统,包括车载供电装置、激光雷达、行车摄像头、以太网交换机、汽车can盒工具以及上位机电脑主机。
35.为了实时获得精确的自车及后方目标车两车之间的位置姿态信息,选用激光雷达来实现。除激光雷达外,应用行车摄像头记录后方视频来进行配合。摄像头信息经以太网交换机传输到电脑主机中。上位机电脑主机通过hdmi信号线与显示器连接。上位机电脑主机除行车摄像头采集的视频信号外,还接受激光雷达探测的位置姿态信息并处理成500kb can信号,与被测车辆控制器can信号、视频数据同步存储并通过显示器显示。从而得到超车场景下的紧急车道保持功能充足的测试数据。
36.如图2所示,行车摄像头包括左侧摄像头、右侧摄像头、后方摄像头;被测车辆两侧后视镜下方安装左、右侧摄像头,且拍摄方向为斜后方;被测车辆后风挡玻璃上方安装后向视频摄像头,用于数据记录;各摄像头用以太网的输出方式汇总到交换机后发送到上位机电脑主机中。
37.激光雷达安装到自车后保险杠正中央,通过数据传输线与上位机电脑主机相连。
38.包含显示器及以上用电设备由车载供电装置进行供电。
39.车载供电装置包括车辆蓄电池、供电装换装置,车辆蓄电池与被测车辆控制器电性连接,车辆蓄电池通过供电转换装置与所述上位机电脑主机、激光雷达、行车摄像头以及显示器连接。
40.实施例2
41.一种车辆超车场景下紧急避让功能测试系统测试方法,包括以下步骤:
42.步骤一、测试系统设备硬件连接:
43.被测车辆(注:配备elk-ot的测试车辆可被称为被测车辆、自车、自车,后方目标车可被成为从车)左、右侧摄像头分别安装在两侧后视镜下方,且拍摄方向为斜后方;后方摄像头安装在被测车辆后风挡玻璃上方,用于数据记录;各摄像头用以太网的输出方式汇总到交换机后发送给上位机电脑主机;
44.激光雷达安装被测车辆后保险杠正中央,通过数据传输线与上位机电脑主机相连;
45.显示器及以上用电设备均由车载供电装置进行供电。
46.步骤二、软件配置:
47.测试系统硬件接连完毕,需要进行软件配置;
48.首先配置行车摄像头,需要在电脑网络设置本地连接中配置摄像头相同的ip地址;
49.激光雷达也需要标定,同样需要在电脑网络设置本地连接中配置激光雷达相同的ip地址;
50.驾驶被测车辆行驶到公共直线道路(道路中央有护栏),打开激光雷达界面观察界面光点是否与系统界面的网格保持平行,校正激光雷达安装角度;
51.另外测试前需要通过上位机将本车长宽高以及激光雷达与被测车辆相对位置信息进行配置,从而使系统输出数据与实际情况趋近一致。
52.步骤三、设置测试用例,测试用例由车辆运动状态、外部环境条件两部分构成。
53.1)如图3所示,设置车辆运动状态为被测车辆(自车)的运动状态,包括车辆档位状态、车辆行驶姿态以及车速;
54.车辆档位包括了d/n/m/s不同档位;车辆行驶姿态包括直行、左侧快/慢偏、右侧快/慢偏。(左偏对应从车在自车左后方、右偏对应从车在自车右后方),车速选取的典型值有25km/h、35km/h、45km/h、55km/h;测试人员通过调整上述三个变量获得完整的自车车辆运动状态要素;
55.2)如图3所示,外部环境状态为被测车辆运行的实际外部环境,外部环境由从车车速、道路曲率构成;
56.由于是超车场景下,从车车速须大于自车车速,因此从车车速设定为自车车速+5km/h、+10km/h、+15km/h、+20km/h;
57.道路曲率包括右/左弯与直道;
58.测试人员通过组合上述两个变量获得完整的外部环境状态要素。
59.3)将车辆运动状态要素与外部环境状态要素进行匹配,逐条生成具体测试项,将测试项汇总生成测试用例。
60.步骤四、测试用例生成完毕后,开始测试执行工作:根据测试用例逐条进行测试验证并记录各测试项的结果,采集被测车辆控制器的can信号与激光雷达输出的两车位置信息。被测车辆控制器的can信号包括但不局限于以下信息:自车的车速信号、自车的档位信号、自车方向盘手力矩信号、自车elk工作状态信号;激光雷达输出的两车位置信息包括激光雷达所提供的两车横向干预时刻的横向速度、加速度、碰撞距离、ttc等信息。
61.步骤五、每条测试用例测试执行完成后,按照用例编号存储对应的数据,依据系统功能指标及性能要求与实际测试结果进行分析比较。
62.完成上述步骤即完成了对此种超车场景下的车辆紧急车道保持实车环境的功能测试验证。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1