一种移动机器人
1.本公开属于移动机器人技术领域,具体涉及一种移动机器人。
背景技术:
2.随着机器人、人工智能技术的发展,使得智能移动机器人代替传统人工巡检成为可能,巡检机器人在工业、电力、安防巡逻等领域都有着广泛的用途。但不同行业对移动机器人用途性能、搭载传感器类型等提出了不同的需求。比如在电力行业,变电站巡检机器人代替传统人工巡检已成为趋势,智能巡检机器人逐渐代替人工完成表计读数、红外测温等巡检任务,通过在线巡检降低运维人员的负担和工作强度,提升了变电站设备巡检效率和安全性,使运维人员及时发现设备不良的运行状况,从而保障变电站安全可靠运行。多自由度的机械臂和灵巧手在工业装配、消费电子自动化领域有着广泛用途,其与移动机器人的结合用于变电站智能巡检,使得传统巡检任务从被动观测转为主动式任务实施成为可能,比如特定目标物体的识别、抓取,拾捡线缆,开关操作等特定任务。
技术实现要素:
3.针对现有技术中的不足,本公开的目的在于提供一种移动机器人,该机器人具备类似人的足、手、眼等模块,适用于工业、电力等多个行业的无人化、智能化业务实现。
4.为实现上述目的,本公开提供以下技术方案:
5.一种移动机器人,包括:
6.移动平台;
7.移动平台上搭载有3d视觉模块、主控模块和灵巧手拾取模块,其中,
8.所述3d视觉模块用于扫描机器人行进过程中的路面信息以及用于采集机器人周边环境信息;
9.所述主控模块用于根据所述3d视觉模块采集的路面信息控制机器人自动避障,以及根据周边环境信息控制灵巧手拾取模块对目标物进行拾取。
10.优选的,所述3d视觉模块包括激光雷达和多路广角rgb摄像头。
11.优选的,所述灵巧手拾取模块包括六自由度机械臂,六自由度机械臂上设置有灵巧手和rgbd深度相机。
12.优选的,所述灵巧手采用多自由度的五指灵巧手。
13.优选的,所述rgbd深度相机包括单目结构光深度相机、双目结构光深度相机和tof深度相机中的任意一种。
14.优选的,所述主控模块采用npu板。
15.优选的,所述机器人还包括通讯模块。
16.与现有技术相比,本公开带来的有益效果为:本公开所述机器人具备类似人类的足、手、眼、脑、通信功能模块,结合嵌入式ai算法,适用于工业、电力等多个行业的无人化、智能化业务实现。
附图说明
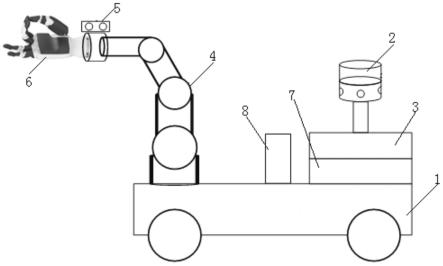
17.图1是本公开一个实施例提供的一种移动机器人的结构示意图;
18.图2是本公开一个实施例提供的基于四摄像头的360
°
环视模块结构的俯视图;
19.图3是本公开另一个实施例提供的主控模块的接口示意图;
20.附图中标记说明如下:
21.1、移动平台;2、3d视觉模块;3、主控模块;4、六自由度机械臂;5、手眼系统-rgbd深度相机;6、灵巧手;7、机械臂控制器;8、通讯模块。
具体实施方式
22.下面将参照附图1至图3详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以通过各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
23.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本公开的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本公开的范围。本公开的保护范围当视所附权利要求所界定者为准。
24.为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本公开实施例的限定。
25.一个实施例中,如图1所示,本公开提供一种移动机器人,包括:
26.移动平台1,
27.移动平台1上搭载有3d视觉模块2、主控模块3和灵巧手拾取模块,其中,
28.所述3d视觉模块2用于扫描机器人行进过程中的路面信息以及用于采集机器人周边环境信息;
29.所述主控模块3用于根据所述3d视觉模块2采集的路面信息控制机器人自动避障,以及根据周边环境信息控制灵巧手拾取模块对目标物进行拾取。
30.本实施例中,移动平台内设置有110~200v交流电源,输出为多路直流电源,比如12v、24v、48v等,可为其它模块提供一定功率的电源;移动平台内还设置有电机,可控制移动平台底端的车轮进行移动或转向。
31.另一个实施例中,所述3d视觉模块2包括激光雷达和多路广角rgb摄像头。
32.本实施例中,激光雷达可采用4线、8线、16线、32线、64线、128线激光雷达或tof面激光雷达,可对路面实时扫描并生成路面的三维点云信息。rgb摄像头则实时对机器人的周边环境进行拍照,采集地面图像。示例性的,如图2所示,4个摄像头前后左右对称分布,每个rgb摄像头与相邻的两个rgb摄像头都有一定的视场重叠,可保证图像采集无死角,无遗漏。
33.另一个实施例中,所述灵巧手拾取模块包括六自由度机械臂4,六自由度机械臂4连接有机械臂控制器7,且六自由度机械臂4上设置有灵巧手6和rgbd深度相机5。
34.本实施例中,rgbd深度相机的usb信号线可通过六自由度机械臂的各轴内空间走线,使得在运动过程中不会出现usb信号线缠绕的情况。rgbd深度相机可实时获取目标物的rgb图像和depth深度图像并传输给主控模块,主控模块根据图像则可进行目标物的ai识别、实时计算目标物的三维坐标等一系列操作。
35.另一个实施例中,所述灵巧手采用多自由度的五指灵巧手。
36.本实施例中,灵巧手模拟人手进行设计,包括5个手指,每个手指包括2~4个运动关节,每个关节有2至3个自由度,并且手指末端内嵌高精度力反馈器,可以类似人手一样抓取物品。相比现有的机械手,本实施例给出的灵巧手具有更高的抓取灵活度,可适用于对不同形状目标物的抓取,特别适用于一些具有不规则形状的现有机械手难以正常抓取的目标物,避免了人工参与,从而提高了巡检效率以及最大程度保证作业人员的安全。
37.另一个实施例中,所述rgbd深度相机包括单目结构光深度相机、双目结构光深度相机和tof深度相机中的任意一种。
38.另一个实施例中,所述主控模块3采用npu板。
39.本实施例中,如图3所示,npu板通过can总线或rs485串口通信连接3d视觉模块。其可对由rgb摄像头拍摄的rgb图像进行鱼眼校正、合成拼接、视角转换计算,以生成360
°
环视图和机器人四周的俯视图,并通过与由激光雷达获取的三维点云数据融合,从而为机器人模块提供3d视觉导航功能和自动避障功能。
40.此外,npu板还通过usb接口连接灵巧手拾取模块,rgbd深度相机可实时获取点rgb图像以及目标物深度图像,其根据图像进行目标物体ai识别和实时计算目标物三维坐标,并控制机械臂控制器驱动六自由度机械臂以及灵巧手对目标物实施拾取等相应操作。
41.npu板还通过can总线或rs485串口通信连接移动平台,其可实时读取电源的状态信息,从而对移动平台的移动状态做出相应控制。
42.另一个实施例中,所述机器人还包括通讯模块8。
43.本实施例中,通讯模块采用5g路由器,具有延时短、带宽大的特点,其通过无线wifi或有线以太网接口连接至主控模块。一方面,该路由器与远程操控模块进行通信,包括实时图像数据(点云、环视图、俯视图、灵巧手上的手眼系统rgbd数据)和机器人状态数据的上传、控制指令的接收下达;另一方面,与机器人模块中的主控模块进行通信交互,使得远程操控模块能够实时在线观察并操控移动机器人模块。
44.以上应用了具体实施例对本公开进行了阐述,只是用于帮助理解本公开,并不用于限制本公开。任何熟悉该技术的技术人员在本公开所揭示的技术范围内的局部修改或替换,都应涵盖在本公开的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1