1.本发明实施例涉及机器人导航技术,尤其涉及一种基于二维码的机器人导航方法。
背景技术:2.随着自动化技术的发展,机器人越来越普遍的出现在了人们的生活和工作中,承担着各类生产生活任务,对机器人工作过程中的定位导航精度直接影响机器人的工作完成情况。
3.现有技术中,通常通过采用激光slam的方式实现机器人工作过程中的导航,但是通过激光slam的定位精度不高,在机器人运行的过程在中存在激光slam失效、定位丢失的问题,无法满足某些应用场景下对机器人定位精度的要求。
技术实现要素:4.为了解决现有技术中的问题,本发明提供一种机器人导航方法,以增加机器人运行过程中的定位精度。
5.本发明提供了一种机器人导航方法,包括:
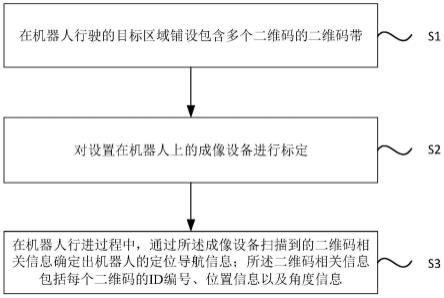
6.s1、在机器人行驶的目标区域铺设包含多个二维码的二维码带;
7.s2、对设置在机器人上的成像设备进行标定;
8.s3、在机器人行进过程中,通过所述成像设备扫描到的二维码相关信息确定出机器人的定位导航信息;所述二维码相关信息包括每个二维码的id编号、位置信息以及角度信息。
9.可选的,该方法还包括:
10.在机器人行进过程中,通过所述成像设备扫描到的二维码相关信息以及激光slam导航模式对机器人进行定位导航。
11.可选的,所述二维码带中的各二维码id编号按照二维码带起点到终点的顺序依次增大。
12.可选的,所述成像设备固定安装在机器人车体的中心线上且拍摄面朝向底面。
13.可选的,所述s3包括:
14.s31、根据所述成像设备首次扫描到的任一二维码进行初始定位,确定该二维码的初始全局定位坐标;
15.s32、在机器人行驶过程中若扫描到二维码,则根据扫描到的二维码相关信息确定机器人的全局坐标,若扫描不到二维码,则执行s33;
16.s33、计算自上次检测到二维码后机器人行驶的路程,判断该路程是否超过设定路程阈值,若没有则执行s34;否则,则进行报警;
17.s34、根据里程计增量以及上一次确定的机器人全局坐标,确定当前机器人的全局坐标;
18.s35、继续执行s32。
19.可选的,在机器人行进过程中,通过所述成像设备扫描到的二维码相关信息以及激光slam导航模式对机器人进行定位导航,包括:
20.s41:通过slam导航,得到机器人在slam地图下的全局定位坐标;
21.s42:若所述成像设备扫描到二维码,则根据扫描到的二维码相关信息确定出机器人的全局坐标;若扫描不到二维码,则执行s43;
22.s43:计算自上次检测到二维码后机器人行驶的路程,判断该路程是否超过设定路程阈值,若超过,则使用slam导航;否则,则执行s44;
23.s44:根据里程计增量以及上一次确定的机器人全局坐标,得到当前机器人的全局坐标;
24.s45:继续执行s42。
25.可选的,该方法还包括:
26.所述二维码带包括设置在停靠站点附近铺设一段至少包括3个二维码的二维码带,以通过所述成像设备扫描到的停靠站点附近的二维码实现对机器人在停靠站点的定位。
27.可选的,所述方法还包括:
28.在所述停靠站点附近铺设的二维码带周围还铺设有一定数量的二维码。
29.本发明通过在机器人行驶的目标区域铺设包含多个二维码的二维码带,通过成像设备扫描到的二维码相关信息来对机器人进行定位导航,增加了机器人的定位精度,实用性强。
附图说明
30.图1为本发明实施例中的一种机器人导航方法的流程图;
31.图2是本发明实施例中采用的二维码的示意图;
32.图3是本发明实施例中的单个二维码的角度的判断标准示意图;
33.图4是本发明实施例中的机器人行驶过程中路线角度的判断标准示意图;
34.图5是本发明实施例中的相机标定时的坐标系示意图;
35.图6是本发明实施例中的相机校验的示意图;
36.图7是本发明实施例中的采用二维码进行机器人导航的流程图;
37.图8是本发明实施例中的结合二维码和激光slam进行机器人导航的流程图;
38.图9是站点附近二维码的铺设示意图;
39.图10是站点附近二维码的另一种铺设示意图。
具体实施方式
40.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
41.实施例
42.图1为本发明实施例提供的一种机器人导航方法的流程图,本实施例可适用于对
运行过程中的机器人进行导航的情况,具体包括如下步骤:
43.s1、在机器人行驶的目标区域铺设包含多个二维码的二维码带。
44.其中,上述目标区域优选为满足高度对称、固定参照物稀少或者动态事物过多的条件的环境,该环境需要干净无油污且行人车辆不多。
45.参见图2,本实施例中的二维码中间有两条粗线的邻边,可看作是二维码坐标系的x轴和y轴,图中粗箭头方向为单个二维码的0
°
方向,id通常在二维码的右下角。每个二维码都有自己的id,本实施例中为了简化工作量,所铺设的这条二维码带的二维码id是连续的,开始id《结束id。二维码带中二维码的铺设间隔为相邻二维码的距离,二维码带的坐标需要一段段直线分别生成。
46.进一步的,单个二维码的角度的判断标准如图3所示,图3的左下角为地图的坐标系。
47.若导航过程中使用到激光导航,则二维码带中第一个二维码的坐标为车体运动中心在第一个二维码上的时候,车在激光slam地图下的全局坐标;如果是纯二维码导航,则根据目标区域中二维码的位置、二维码之间的距离等要素自定义二维码在全局地图下的坐标。
48.图4为机器人行驶过程中路线角度的判断标准示意图,该角度判断标准与二维码的id排序有关,图4的左下角为地图的坐标系。二维码路线起点为最小id,终点为最大id,看起始二维码指向终点二维码的箭头方向的角度。
49.最后根据铺设的二维码以及相关规则生成每个二维码的相关信息[id,x0,y0,θ0],其中,x0为二维码的x轴坐标,y0为二维码的y轴坐标,θ0二维码的角度。
[0050]
s2、对设置在机器人上的成像设备进行标定。
[0051]
上述成像设备可以为固定安装在机器人车体中心线上的相机,若安装在其它位置,则需要根据实际的安装位置适当的调整二维码的铺设位置。相机朝地面拍摄且人为设定一定的高度,在工作之前,需要提前设置相机的ip和通信方式。
[0052]
进一步参见图5,因二维码相机坐标系为右手坐标系,与通常使用的左手坐标系不一致,故标定相机的角度时可将粗箭头方向看作它的x轴正方向。
[0053]
相机的标定:使用机械参数,即相机安装位置与运动中心的物理距离及角度作为二维码相机的坐标(x,y,θ),该坐标表示相机相对于运动中心的坐标。
[0054]
相机的校验:
[0055]
第1步:参见图6,沿着二维码的中心线在地上画出延长线,使用两侧的十字光标参照,使得机器人的运动中心对准二维码,横向的偏差可用尺测量出来;
[0056]
第2步:配置该二维码id和坐标,坐标设为(0,0,0);
[0057]
第3步:通过相机读取的运动中心的坐标,即相机相对于运动中心的偏差量,在机械参数作为二维码相机的坐标(x,y,θ)上进行补偿;
[0058]
第4步:相机再次读取的运动中心的坐标,则此时偏差量的值应接近于(0,0,0),如还有偏差,则重复上述步骤。
[0059]
s3、在机器人行进过程中,通过所述成像设备扫描到的二维码相关信息确定出机器人的定位导航信息。
[0060]
具体的参见图7,所述s3包括:
[0061]
s31、根据所述成像设备首次扫描到的任一二维码进行初始定位,确定该二维码的初始全局定位坐标;其中,相机需提前设置ip和通信方式。
[0062]
s32、继续行驶,在机器人行驶过程中若扫描到二维码,则根据扫描到的二维码相关信息[id,x0,y0,θ0]确定出局部坐标和机器人的全局坐标,若扫描不到二维码,则执行s33;
[0063]
其中,局部坐标为二维码相对机器人车体运动中心的坐标;全局坐标为根据目标区域中二维码的位置、二维码之间的距离等要素自定义二维码在全局地图下的坐标。
[0064]
s33、匹配度的计算:在扫描到二维码的时候,匹配度为100%;在扫描不到的时候,计算自上次检测到二维码后机器人行驶的路程,路程越远,匹配度越低,判断该路程是否超过设定路程阈值,若没有则执行s34;否则,则进行报警。
[0065]
s34、根据里程计增量以及上一次确定的机器人全局坐标,确定当前机器人的全局坐标;其中,里程计增量为相机扫描到二维码时记录的里程计数据与当前里程计的差值,通过该差集与上一次确定的机器人全局坐标即可得到机器人当前的全局坐标,实现机器人的导航功能。
[0066]
s35、继续执行s32。
[0067]
作为另一种可选的实施方式,在机器人行进过程中,通过所述成像设备扫描到的二维码相关信息以及激光slam导航模式对机器人进行定位导航。上述实施方式相对于纯二维码导航,多了对于长时间未扫描到二维码,即二维码导航匹配度过低之后报警的处理,在二维码不可信的时候切换到激光slam导航。
[0068]
具体的参见图8,结合二维码和激光slam混合导航的具体步骤如下:
[0069]
s41:通过slam导航,得到机器人在slam地图下的全局定位坐标;
[0070]
s42:若所述成像设备扫描到二维码,则根据扫描到的二维码相关信息[id,x0,y0,θ0]确定出局部坐标和机器人的全局坐标;若扫描不到二维码,则执行s43;其中,上述局部坐标为二维码相对机器人车体运动中心的坐标。
[0071]
s43:匹配度的计算:在扫描到二维码的时候,匹配度为100%;在扫描不到的时候,计算自上次检测到二维码后机器人行驶的路程,路程越远,匹配度越低。判断该路程是否超过设定路程阈值,若超过,则使用slam导航;否则,则执行s44;
[0072]
s44:根据里程计增量以及上一次确定的机器人全局坐标,得到当前机器人的全局坐标;
[0073]
s45:继续执行s42。
[0074]
在上述实施例的基础上,还可以通过利用二维码进行末端定位。具体的,有些站点(货物搬运点,货物交接点)对机器人定位要求比较高,在这些站点使用激光导航定位不一定能达到定位要求,可以在这些站点附近铺设一段二维码带,切换成二维码导航。
[0075]
如图所9示,在终点处及前方贴上一串贴上二维码,最左侧绿色箭头为车行进方向,星星为目标点,以目标点作为局部地图的原点。其中,站点处的二维码带所铺设的二维码个数大于等于3个。
[0076]
在一些特殊情况下,由于二维码相机所拍摄的范围有限,如果在之前的行驶过程中,机器人的行走偏差很大,到了精度要求较高的站点附近,机器人上的相机有可能扫描不到所铺设的二维码,鉴于此,可以在上述二维码带的周围再铺设一定数量的二维码,如图10
中t字型贴法,或者九宫格贴法等,只要机器人上的二维码相机拍摄到任意一个二维码,即可保证机器人最终停的位置达到定位需求。
[0077]
本发明实施例的技术方案,通过在机器人行驶的目标区域铺设二维码来对机器人进行定位导航,增加了定位精度,实用性强。
[0078]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。