一种太阳直接辐射仪及其自动跟踪方法
1.本发明涉及一种太阳直接辐射仪及其自动跟踪方法,属于检测技术领域。
背景技术:
2.目前国内太阳直接辐射测量的设计主要是固定式、单轴的追踪,并且采用方法较为单一,单轴的追踪方式只能在方位轴方向对准太阳,垂直方向每隔几天就需要人工调整,只能进行半自动检测。
3.同时,在已有的全自动跟踪方式中,视日运动轨迹的跟踪方式,不能自行消除累计误差,而单光电跟踪方式易受复杂天气的影响。
4.因此亟需设计一种新型的辐射仪,基于其的跟踪方法能够解决实时跟踪太阳造成测量不精确的问题。
技术实现要素:
5.本发明提供一种太阳直接辐射仪及其自动跟踪方法,提高了跟踪太阳测量的精确性。
6.本发明解决其技术问题所采用的技术方案是:
7.一种太阳直接辐射仪,包括步进电机模块、主控模块、光电检测模块以及辐射检测模块,所述步进电机模块包括方位轴步进电机和高度轴步进电机,方位轴步进电机固定在底座上,且方位轴步进电机的电机轴垂直安装在底座中心,以底座中心为原点,穿过原点的x轴和y轴构成的坐标面平行于底座平面,方位轴步进电机的电机轴轴向方向为z轴,构建三维坐标系;
8.高度轴步进电机设置在方位轴步进电机位于y轴方向的顶部,且高度轴步进电机的电机轴垂直于z轴方向设置;
9.光电检测模块和辐射检测模块连接形成检测构件,高度轴步进电机的电机轴与检测构件连接;
10.主控模块同时与步进电机模块、检测构件连通,主控模块向方位轴步进电机发送启动指令,检测构件能够在x轴和y轴构成的坐标面内移动,主控模块向高度轴步进电机发送启动指令,检测构件能够在x轴和z轴构成的坐标面、y轴和z轴构成的坐标面内移动;
11.作为本发明的进一步优选,检测构件安装在圆柱形光筒内,圆柱形光筒的一端安装辐射检测模块,其中,辐射检测模块包括透镜、感应面、热电堆以及测量底座,在测量底座的表面顺次叠设热电堆、感应面以及透镜,透镜罩设在圆柱形光筒的一端端口;
12.且透镜朝向太阳方向;
13.作为本发明的进一步优选,在圆柱形箱体的箱体外壁上套设光筒卡轮,光筒卡轮与高度轴步进电机的电机轴固定;
14.作为本发明的进一步优选,所述光电检测模块为光电检测传感器,多个光电检测传感器沿着透镜的圆周边均匀分布;
15.作为本发明的进一步优选,光电检测传感器设置四个,沿着透镜的圆周四个象限均匀分布;
16.作为本发明的进一步优选,步进电机模块、主控模块均置于方型箱体内,步进电机模块的方位轴步进电机的电机轴伸出方型箱体与底座固定;
17.在方型箱体内底部布设电机托盘,方位轴步进电机置于电机托盘上;
18.作为本发明的进一步优选,所述主控模块包括stm32微处理器、步进电机驱动模块、无线通信模块以及外围电路,四者连通;
19.光电检测模块、辐射检测模块以及步进电机模块同时与主控模块连通,且步进电机模块与辐射检测模块连通,还包括上位机模块,其同样与主控模块连通;
20.作为本发明的进一步优选,所述无线通信模块选用zigbee进行数据传输。
21.一种基于所述太阳直接辐射仪的自动跟踪方法,具体包括以下步骤:
22.步骤s1:上位机通过zigbee无线通信向主控模块发出启动指令,通过主控模块获取当前检测地的经度、纬度以及时间,计算太阳时角ω,计算公式为:
[0023][0024]
公式(1)中,ω为太阳时角,n0为当前检测地的经度,n
st
为制定标准时间所采用的标准经度,t0为当前检测地的时间,w为经度修正系数;
[0025]
步骤s2:通过主控模块获取当前检测地的经度、纬度以及时间,计算太阳赤纬角δ,计算公式为:
[0026][0027]
公式(2)中,b为太阳相对于地球的角度,且n为天数,且从每年的1月1日开始记录天数;
[0028]
步骤s3:通过步骤s1和步骤s2计算得到的太阳时角和太阳赤纬角计算太阳高度角以及太阳方位角,其中太阳高度角γs的计算公式为:
[0029][0030]
公式(3)中,δ为太阳赤纬角,φ为检测地的纬度角,ω为太阳时角;
[0031]
太阳方位角的计算公式为:
[0032][0033]
公式(4)中,τs为太阳方位角,δ为太阳赤纬角,φ为检测地的纬度角,γs为太阳高度角;
[0034]
步骤s4:根据步骤s3,获取太阳高度角以及太阳方位角,调整太阳直接辐射仪的初始位置,使其进入初始状态;
[0035]
步骤s5:若初始状态跟踪后无累积误差,则直接获取太阳直接辐射测量值,若跟踪后存在累积误差,则进行下一步;
[0036]
步骤s6:太阳直接辐射进行视日运动轨迹跟踪,太阳光在四个光电检测器内形成圆形光斑,光斑在四象限的部分分别假设为ⅰ、ⅱ、ⅲ、ⅳ,由光电效应产生的电信号分别为vⅰ、vⅱ、vⅲ、vⅳ,设定光斑中心与检测构件在x轴和y轴构成的坐标面内的偏差值为g
xy
,光斑中心与检测构件在x轴和z轴构成的坐标面、y轴和z轴构成的坐标面内的偏差值为gh,偏差值的计算公式分别为:
[0037][0038]
同时,辐射测量模块获取本次的辐射测量值以及上一次太阳的辐射测量值,计算太阳直接辐射的相对变化值:
[0039]
s=(s
1-s0)/(s1+s0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0040]
公式(6)中,s1为本次的辐射测量值,s0为上一次的太阳辐射测量值;
[0041]
步骤s7:通过步骤s6获取的偏差值以及太阳直接辐射的相对变化值计算得出当前方位轴步进电机和高度轴步进电机的运动方向,即
[0042]
dxy=ag
xy
+bs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0043]
dh=agh+bs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0044]
公式(7)、公式(8)中,a为光电检测传感器的权重系数,可取0.4,b为太阳辐射测量值的权重系数,可取0.6,dxy为方位轴步进电机在x轴和y轴构成的坐标面内的移动方位,dh为高度轴步进电机在x轴和z轴构成的坐标面、y轴和z轴构成的坐标面内的移动方位;
[0045]
步骤s8:由主控模块根据dxy及dh分别对方位轴步进电机和高度轴步进电机进行步进旋转微调,同时再次分别进行太阳直接辐射值及光电传感器的检测并计算dxy及dh,若dxy及dh的符号即方向改变时,分别停止调节,直到方位角及高度角调整完毕;
[0046]
步骤s9:每隔1分钟,重复按照步骤s1-s7进行检测构件的姿态调整,直至获取无误差的太阳直接辐射测量值,并将结果通过zigbee无线通信传送至上位机,结束跟踪;
[0047]
作为本发明的进一步优选,步骤s9中获取太阳直接辐射测量值的具体步骤为:
[0048]
步骤s91:太阳光直射至透镜表面,通过透镜传至感应面,当感应面接受太阳光辐射后,达到相对热平衡时计算公式为
[0049]
i=k1*(t
1-t2)+(1-ε)*i+k2*(t
1-t3)
ꢀꢀꢀꢀꢀ
(9)
[0050]
公式(9)中,k1为传导到底端测量底座的热传导系数,k2为空气温度与感应面温度的热传导系数,t1为感应面的温度,t2为测量底座的温度,ε为感应面的吸收率,i为检测入射辐射值,t3为空气温度;
[0051]
步骤s92:通过获取感应面与测量底座的温差,计算热电堆产生的电动势,公式为
[0052]
v=i0*(t
1-t2)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0053]
公式(10)中,i0为热电端转换系数,单位为μv/℃,t1为感应面的温度,t2为测量底座的温度;
[0054]
步骤s93:结合步骤s91的公式(9)和步骤s92的公式(10),得到电动势信号的计算
公式为
[0055][0056]
公式(11)中,i0为热电端转换系数,单位为μv/℃,k1为传导到底端测量底座的热传导系数,k2为空气温度与感应面温度的热传导系数,t1为感应面的温度,t2为测量底座的温度,ε为感应面的吸收率,i为检测入射辐射值,t3为空气温度,由公式(11)得出辐射检测模块的输出电信号大小,从而计算出直接辐射度的强弱。
[0057]
通过以上技术方案,相对于现有技术,本发明具有以下有益效果:
[0058]
1、本发明提供的太阳直接辐射仪,通过方位轴步进电机和高度轴步进电机的设置,能够在如图1所示x轴和y轴构成的坐标面内移动,同时还能够在x轴和z轴构成的坐标面、y轴和z轴构成的坐标面内移动,解决了单轴固定式检测不能够实时准确跟踪的问题,提高了仪器跟踪的精度,实现更为精准的直接辐射测量;
[0059]
2、本发明提供的太阳直接辐射仪,视日运动轨迹的跟踪方式,可以自行消除累计误差,解决了光电跟踪易受复杂天气的影响以及视日运动轨迹跟踪积累误差的影响,提高了仪器设备跟踪运行检测的稳定性和准确性。
附图说明
[0060]
下面结合附图和实施例对本发明进一步说明。
[0061]
图1是本发明提供的模块连接示意框图;
[0062]
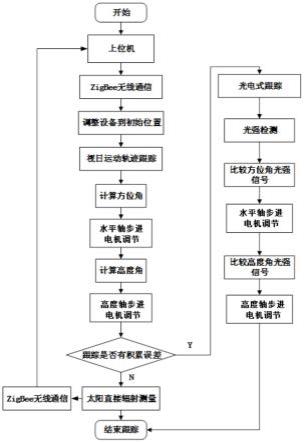
图2是本发明提供的太阳直接辐射仪的工作流程示意图;
[0063]
图3a-图3b是本发明提供的太阳直接辐射仪的左视图以及右视图;
[0064]
图4a-图4b是本发明提供的太阳直接辐射仪的正视图以及俯视图;
[0065]
图5是本发明提供的辐射检测装置的剖视图;
[0066]
图6本发明提供的光电检测模块运行时的光斑分布示意图。
[0067]
图中:1为辐射检测模块,2为光筒,3为光筒卡轮,4为光电检测传感器,5为步进电机卡套,6为高度轴步进电机,7为方位轴步进电机,8为stm32微处理器,9为底座,10为仪器后盖,11为方型箱体,12为电机托盘,13为遮尘透明玻璃盖,14为透镜,15为感应面,16为热电堆,17为测量底座,18为辐射测量外壳。
具体实施方式
[0068]
现在结合附图对本发明作进一步详细的说明。本技术的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0069]
如背景技术中阐述的,目前关于国内太阳直接辐射测量的全自动跟踪方式中,首先是以单轴的追踪方式,因此只能在方位轴方向对准太阳,其次是由于受复杂天气的影响,容易出现误差,但是却无法自行消除累积误差。因此本技术在现有跟踪方式的基础上,做了
改进与试验,提供一种太阳直接辐射仪,图1中可以看出,本技术基于的模块图主要包括步进电机模块、主控模块、光电检测模块以及辐射检测模块1,主控模块包括stm32微处理器8、步进电机驱动模块、无线通信模块以及外围电路,四者连通;光电检测模块、辐射检测模块以及步进电机模块同时与主控模块连通,且步进电机模块与辐射检测模块连通,还包括上位机模块,其同样与主控模块连通。这里优选实施例中,步进电机模块中的步进电机(即下文阐述的方位轴步进电机7和高度轴步进电)采用57byg250b-8型号步进电机,步进电机驱动芯片采用tb67s1109aftg支持最高32步进角度细分,无线通信模块是以cc2530芯片为核心的zigbee。
[0070]
在本技术提供的系统中,步进电机模块包括方位轴步进电机和高度轴步进电机6,此种结构的设置,能够满足在方位轴以及垂直向双向的自动调节,以提高测量的精确度,同时光电检测模块的设置,可以在视日运动轨迹的跟踪方式中,自行消除累计误差,从而进一步提高检测的精确度。
[0071]
接下来就针对上述原理,进行具体阐述,图3a-图4b所示,方位轴步进电机固定在底座9上,且方位轴步进电机的电机轴垂直安装在底座中心,由于后续阐述自动跟踪方法时需要利用方位问题,因此为了方便描述,本技术以底座中心为原点,穿过原点的x轴和y轴构成的坐标面平行于底座平面,方位轴步进电机的电机轴轴向方向为z轴,构建三维坐标系;
[0072]
高度轴步进电机设置在方位轴步进电机位于y轴方向的顶部,且高度轴步进电机的电机轴垂直于z轴方向设置;光电检测模块和辐射检测模块连接形成检测构件,高度轴步进电机的电机轴与检测构件连接;
[0073]
主控模块同时与步进电机模块、检测构件连通,主控模块向方位轴步进电机发送启动指令,检测构件能够在x轴和y轴构成的坐标面内移动,主控模块向高度轴步进电机发送启动指令,检测构件能够在x轴和z轴构成的坐标面、y轴和z轴构成的坐标面内移动;上述移动方式满足了仪器在方位轴以及垂直向双向的调节,完全实现了全自动的跟踪方式。
[0074]
本技术中,步进电机模块、主控模块均置于方型箱体11内,这里主控模块位于方型箱体的内壁左侧(以图3a中视角为例),以图3b中角度所示,方型箱体的背部为活动结构,即为仪器后盖10,方便整个方型箱体拆卸安装。步进电机模块的方位轴步进电机的电机轴伸出方型箱体与底座固定;在方型箱体内底部布设电机托盘12,方位轴步进电机置于电机托盘上;方位轴步进电机以及高度轴步进电机之间是通过步进电机卡套5实现紧固。检测构件安装在圆柱形光筒2内,圆柱形光筒的一端安装辐射检测模块,其中,图5所示,辐射检测模块包括透镜14、感应面15、热电堆16以及测量底座17,在测量底座的表面顺次叠设热电堆、感应面以及透镜,透镜罩设在圆柱形光筒的一端端口;且透镜朝向太阳方向,可以进行视日运动轨迹的跟踪方式。
[0075]
为了保护透镜,会在透镜的表面罩设一个遮尘透明玻璃盖13;同时所谓的辐射检测模块安装在辐射测量外壳18内,整个辐射测量外壳嵌设在圆柱形光筒的一端。
[0076]
在实施例中,为了将检测构件与步进电机模块连接,在圆柱形箱体的箱体外壁上套设光筒卡轮3,光筒卡轮与高度轴步进电机的电机轴固定。
[0077]
当实施例提供了全自动跟踪模式后,还需要解决自行消除累计误差的问题,本技术中解决此问题的结构是光电检测模块,所述光电检测模块为光电检测传感器,多个光电检测传感器沿着透镜的圆周边均匀分布。在优选实施例中,光电检测传感器设置四个,沿着
透镜的圆周四个象限均匀分布,图6即为在进行误差累计消除时光电检测模块的光斑分布图。
[0078]
接下来如图2所示,提供了本技术基于优选实施例的自动跟踪方法,具体包括以下步骤:
[0079]
步骤s1:上位机通过zigbee无线通信向主控模块发出启动指令,通过主控模块获取当前检测地的经度、纬度以及时间,计算太阳时角ω,计算公式为:
[0080][0081]
公式(1)中,ω为太阳时角,n0为当前检测地的经度,n
st
为制定标准时间所采用的标准经度,t0为当前检测地的时间,w为经度修正系数;
[0082]
步骤s2:通过主控模块获取当前检测地的经度、纬度以及时间,计算太阳赤纬角δ,计算公式为:
[0083][0084]
公式(2)中,b为太阳相对于地球的角度,且n为天数,且从每年的1月1日开始记录天数;
[0085]
步骤s3:通过步骤s1和步骤s2计算得到的太阳时角和太阳赤纬角计算太阳高度角以及太阳方位角,其中太阳高度角γs的计算公式为:
[0086][0087]
公式(3)中,δ为太阳赤纬角,φ为检测地的纬度角,ω为太阳时角;
[0088]
太阳方位角的计算公式为:
[0089][0090]
公式(4)中,τs为太阳方位角,δ为太阳赤纬角,φ为检测地的纬度角,γs为太阳高度角;
[0091]
步骤s4:根据步骤s3,获取太阳高度角以及太阳方位角,调整太阳直接辐射仪的初始位置,使其进入初始状态;
[0092]
步骤s5:若初始状态跟踪后无累积误差,则直接获取太阳直接辐射测量值,若跟踪后存在累积误差,则进行下一步;
[0093]
步骤s6:太阳直接辐射进行视日运动轨迹跟踪,光电检测模块检测当前的光照强度,四个完全相同的光电检测传感器均匀的分布在光电检测模块的四个象限上,进入到光电检测模块的太阳光会在探测模块内部形成圆形的光斑,光斑在四象限的部分分别假设为ⅰ、ⅱ、ⅲ、ⅳ,由光电效应产生的电信号分别为vⅰ、vⅱ、vⅲ、vⅳ,设定光斑中心与检测构件在x轴和y轴构成的坐标面内的偏差值为g
xy
,光斑中心与检测构件在x轴和z轴构成的坐标面、y
轴和z轴构成的坐标面内的偏差值为gh,偏差值的计算公式分别为:
[0094][0095]
同时,辐射测量模块获取本次的辐射测量值以及上一次太阳的辐射测量值,计算太阳直接辐射的相对变化值:
[0096]
s=(s
1-s0)/(s1+s0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0097]
公式(6)中,s1为本次的辐射测量值,s0为上一次的太阳辐射测量值;
[0098]
步骤s7:通过步骤s6获取的偏差值以及太阳直接辐射的相对变化值计算得出当前方位轴步进电机和高度轴步进电机的运动方向,即
[0099]
dxy=ag
xy
+bs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0100]
dh=agh+bs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0101]
公式(7)、公式(8)中,a为光电检测传感器4的权重系数,可取0.4,b为太阳辐射测量值的权重系数,可取0.6,dxy为方位轴步进电机在x轴和y轴构成的坐标面内的移动方位,dh为高度轴步进电机在x轴和z轴构成的坐标面、y轴和z轴构成的坐标面内的移动方位;
[0102]
步骤s8:由主控模块根据dxy及dh分别对方位轴步进电机和高度轴步进电机进行步进旋转微调,同时再次分别进行太阳直接辐射值及光电传感器的检测并计算dxy及dh,若dxy及dh的符号即方向改变时,分别停止调节,直到方位角及高度角调整完毕;
[0103]
步骤s9:每隔1分钟,重复按照步骤s1-s7进行检测构件的姿态调整,直至获取无误差的太阳直接辐射测量值,微处理器将结果通过zigbee无线通信传送至上位机,服务器内存储数据,而上位机显示辐射检测数据以及当前太阳高度角、方位角等信息,结束跟踪。
[0104]
在步骤s9中获取太阳直接辐射测量值的具体步骤为:
[0105]
步骤s91:太阳光直射至透镜表面,通过透镜传至感应面,当感应面接受太阳光辐射后,达到相对热平衡时计算公式为
[0106]
i=k1*(t
1-t2)+(1-ε)*i+k2*(t
1-t3)
ꢀꢀꢀꢀꢀ
(9)
[0107]
公式(9)中,k1为传导到底端测量底座的热传导系数,k2为空气温度与感应面温度的热传导系数,t1为感应面的温度,t2为测量底座的温度,ε为感应面的吸收率,i为检测入射辐射值,t3为空气温度;
[0108]
步骤s92:通过获取感应面与测量底座的温差,计算热电堆产生的电动势,公式为
[0109]
v=i0*(t
1-t2)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0110]
公式(10)中,i0为热电端转换系数,单位为μv/℃,t1为感应面的温度,t2为测量底座的温度;
[0111]
步骤s93:结合步骤s91的公式(9)和步骤s92的公式(10),得到电动势信号的计算公式为
[0112][0113]
公式(11)中,i0为热电端转换系数,单位为μv/℃,k1为传导到底端测量底座的热传导系数,k2为空气温度与感应面温度的热传导系数,t1为感应面的温度,t2为测量底座的温
度,ε为感应面的吸收率,i为检测入射辐射值,t3为空气温度,由公式(11)得出辐射检测模块的输出电信号大小,从而计算出直接辐射度的强弱。
[0114]
通过上述阐述可知,本技术采用的是双轴跟踪方式,解决了单轴固定式检测不能够实时准确跟踪问题,提高了仪器跟踪的精度,实现更精准直接辐射测量,将常用的两种常用的跟踪方式相结合,解决了光电跟踪易受复杂天气的影响以及视日运动轨迹跟踪积累误差的影响,提高了仪器设备跟踪运行检测的稳定性和准确性。
[0115]
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本技术所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0116]
本技术中所述的“和/或”的含义指的是各自单独存在或两者同时存在的情况均包括在内。
[0117]
本技术中所述的“连接”的含义可以是部件之间的直接连接也可以是部件间通过其它部件的间接连接。
[0118]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1