一种混合动力联调测试方法、设备及系统与流程
1.本发明涉及混合动力测试领域,尤其涉及一种混合动力联调测试方法、设备及系统。
背景技术:
2.现有功率级混合动力联调包括开环测试和在环测试,开环测试中台架主要由测功机、测功机操作台、动力总成、多合一控制器、电池包等组成,测试员操作油门、制动踏板等开关信号,混合动力整车控制器采集到踏板信号后控制动力总成工作并输出扭矩,测功机采集输出轴扭矩的同时带动输出轴转动。半实物在环测试中,将混合动力整车等模型与测功机台架、被测对象实物进行实时耦合,通过自由切换不同构型混合动力产品的模型及软件控制策略。
3.采用手动操作油门及制动踏板的动力总成开环测试,操作信号与输出扭矩不关联,将导致混合动力整车控制器的实际车速计算不准确,纯电驱动动力总成ev模式、模式纯电与发动机共同驱动模式ecvt、超速模式od以及变速箱1/2档切换等功能无法实现,测试不完整。输出轴转速由测功机单向开环带动的半实物在环测试,在联调混合动力联调测试中无法实现重型商用车标准工作循环工况c-wtvc等工况车速自动跟随测试,导致无法准确控制输出轴转速。
技术实现要素:
4.本发明提供了一种混合动力联调测试方法、设备及系统,在混动台架的联调测试中准确计算实际车速,实现实际车速自动跟随目标车速测试及准确控制输出轴转速。
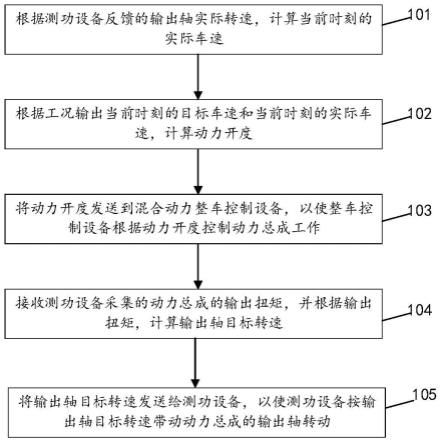
5.为了解决上述技术问题,本发明实施例提供了一种混合动力联调测试方法,包括:根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速;
6.根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度;
7.将动力开度发送到混合动力整车控制设备,以使整车控制设备根据动力开度控制动力总成工作;
8.接收测功设备采集的动力总成的输出扭矩,并根据输出扭矩,计算输出轴目标转速;
9.将输出轴目标转速发送给测功设备,以使测功设备按输出轴目标转速带动动力总成的输出轴转动。
10.实施本发明实施例,通过整车控制设备、硬件在环设备、测功设备和动力总成之间形成闭环控制,实现混动台架的联调测试,根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速,根据工况输出当前时刻的目标车速和当前时刻的实际车速计算动力开度,使混合动力整车控制设备控制动力总成工作,根据动力总成的输出扭矩计算输出轴目标转速,按输出轴目标转速带着动力总成的输出轴转动,准确控制输出轴转速,反馈输出轴实际转速,实现实际车速自动跟随目标车速的混合动力联调测试,同时目标车速信号与输
出扭矩关联变化,可开展不同工况模式进行车速自动跟随测试,保证了混动台架的测试完整度。
11.作为优选方案,根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度,具体为:
12.根据工况输出当前时刻的目标车速计算目标阻力;
13.根据当前时刻的目标车速和当前时刻的实际车速,计算目标驱动力;
14.根据目标阻力和目标驱动力,计算目标合力;
15.根据目标合力,计算动力开度。
16.实施本发明实施例,利用pid算法调节目标车速和当前实际车速,利用偏差值进行比例积分微分调节计算出目标驱动力,适应性和鲁棒性强。结合目标驱动力和工况路谱目标阻力计算目标合力,再根据目标合力计算动力开度,便于混合动力整车控制设备用过准确的动力开度信息来控制动力总成工作。
17.作为优选方案,根据目标合力计算动力开度,具体为:
18.若目标合力为正值,则根据油门曲线,计算油门开度;
19.若目标合力不为正值,则根据目标合力和制动力,计算制动踏板开度。
20.实施本发明实施例,根据目标合力的正负,计算制动踏板开度或者油门开度,从而判断出需要加速还是减速,便于动力总成执行相应动作。
21.作为优选方案,接收测功设备采集的动力总成的输出扭矩,并根据输出扭矩,计算输出轴目标转速,具体为:
22.接收测功设备采集的动力总成的输出扭矩,将输出扭矩经过主减速器模型放大后输入驱动力计算模型,通过驱动力计算模型,计算轮端驱动力;
23.根据目标合力和阻力模型,计算实际行驶阻力;
24.根据实际行驶阻力和轮端驱动力,计算整车实际合力;
25.根据整车实际合力计算模型车速,再根据模型车速,计算输出轴目标转速。
26.实施本发明实施例,将输出扭矩经过一系列计算,计算出输出轴目标转速,实现动力总成输出扭矩与输出轴转速之间相互关联,形成完整的自动闭环测试,从而可开展动力总成ev/od/ecvt/模式以及变速箱1/2档切换等功能的完整闭环测试,无需人工参与控制。
27.作为优选方案,根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度,其中,当工况为循环工况时,根据循环工况的路谱输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度,并执行混合动力联调测试过程中相应动作,执行到将输出轴目标转速发送给测功设备,以使测功设备按输出轴目标转速动动力总成的输出轴转动时,路谱的时刻增加预设时间,转至根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速的步骤,直至路谱运行结束。
28.实施本发明实施例,当工况是循环工况时,计算出动力开度后,执行混合动力联调测试过程中相应动作,执行到测功设备按输出轴目标转速带动着动力总成的输出轴转动,将路谱的时刻增加预设时间,获得下一时刻的目标车速,再根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速,再通过目标车速和实际车速计算出动力开度,执行之后相应动作,实现循环工况控制,直至路谱运行结束。实现了在循环工况下,车速的自动跟随联调测试,可用于重型商用车标准工作循环c-wtvc工况、纯电汽车综合里程测试nedc工况
等循环工况的自动循环测试,适用性强。
29.作为优选方案,为了解决相同的技术问题,本发明实施例还提供了一种硬件在环设备,包括:包括:转化计算模块、驾驶员模块、动力控制模块、目标转速计算模块和目标转速计算模块;
30.其中,转化计算模块用于根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速;
31.驾驶员模块用于根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度;
32.动力控制模块用于将动力开度发送到混合动力整车控制设备,以使整车控制设备根据动力开度控制动力总成工作;
33.目标转速计算模块用于接收测功设备采集的动力总成的输出扭矩,并根据输出扭矩,计算输出轴目标转速;
34.输出轴转动模块用于将输出轴目标转速发送给测功设备,以使测功设备按输出轴目标转速带动动力总成的输出轴转动。
35.作为优选方案,驾驶员模块包括目标阻力计算单元、目标驱动力计算单元、目标合力计算单元和动力开度计算单元;
36.其中,目标阻力计算单元用于根据工况输出当前时刻的目标车速计算目标阻力;
37.目标驱动力计算单元用于根据当前时刻的目标车速和当前时刻的实际车速,计算目标驱动力;
38.目标合力计算单元用于根据目标阻力和目标驱动力,计算目标合力;
39.动力开度计算单元用于根据目标合力,计算动力开度,若目标合力为正值,则根据油门曲线,计算油门开度;若目标合力不为正值,则根据目标合力和最大制动力,计算制动踏板开度。
40.作为优选方案,目标转速计算模块包括轮端驱动力计算单元、实际行驶阻力计算单元、整车实际合力计算单元和输出轴目标转速计算单元;
41.其中,轮端驱动力计算单元用于接收测功设备采集的动力总成的输出扭矩,将输出扭矩经过主减速器模型放大后输入驱动力计算模型,通过驱动力计算模型,计算轮端驱动力;
42.实际行驶阻力计算单元用于根据目标合力和阻力模型,计算实际行驶阻力;
43.整车实际合力计算单元用于根据实际行驶阻力和轮端驱动力,计算整车实际合力;
44.输出轴目标转速计算单元用于根据整车实际合力计算模型车速,再根据模型车速,计算输出轴目标转速。
45.作为优选方案,为了解决相同的技术问题,本发明实施例还提供了一种混合动力联调测试系统,包括:整车控制设备、硬件在环设备、测功设备和动力总成;其中,硬件在环设备执行混合动力联调测试方法;
46.其中,设备的连接如下:硬件在环设备与整车控制设备连接,整车控制设备与动力总成连接,动力总成与测功设备连接,测功设备与硬件在环设备连接。
47.作为优选方案,整车控制设备、硬件在环设备、测功设备和动力总成;
48.其中,整车控制设备用于根据动力开度控制动力总成工作;
49.硬件在环设备用于执行混合动力联调测试方法;
50.测功设备用于采集动力总成的输出扭矩,反馈输出扭矩给硬件在环设备,按输出轴目标转速带着动力总成的输出轴转动,并反馈输出轴实际转速给硬件在环设备;
51.动力总成用于执行动力控制动作和输出轴转动动作。
附图说明
52.图1:为本发明提供的混合动力联调测试方法的一种实施例的流程示意图;
53.图2:为本发明提供的混合动力联调测试方法的一种实施例的c-wtvc工况流程示意图;
54.图3:为本发明提供的混合动力联调测试方法的一种实施例的c-wtvc工况路谱的车速变化曲线;
55.图4:为本发明提供的混合动力联调测试方法的一种实施例的目标驱动力pid算法模型;
56.图5:为本发明提供的硬件在环设备的一种实施例的结构示意图;
57.图6:为本发明提供的混合动力联调测试系统的一种实施例的连接示意图。
具体实施方式
58.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
59.实施例一
60.请参照图1,为本发明实施例提供的一种混合动力联调测试方法的流程示意图。本实施例通过实现实际车速自动跟随目标车速测试及准确控制输出轴转速,目标车速信号与输出扭矩关联变化,在混动台架的联调测试中准确计算实际车速,可开展不同工况模式进行车速自动跟随测试。该联调测试方法包括步骤101至步骤105,各步骤具体如下:
61.步骤101:根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速。
62.在本实施例中,根据测功设备反馈的输出轴实际转速(rmp)转化成当前时刻的实际车速(m/s),实际车速的计算公式包括但不限于以下公式:
63.输出轴角速度(rad/s)=输出轴实际转速/(30/pi)
64.实际车速(m/s)=(输出轴角速度/主减比)*轮胎半径(m)
65.其中,pi为圆周率。
66.步骤102:根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度。
67.在本实施例中,工况可以是动力总成ev/od/ecvt/模式以及变速箱1/2档切换等功能测试下的工况,还可以包括重型商用车标准工作循环c-wtvc工况、纯电汽车综合里程测试nedc工况等循环工况。
68.可选的,当工况为循环工况时,根据循环工况的路谱输出当前时刻的目标车速和
当前时刻的实际车速,计算动力开度,并执行混合动力联调测试过程中相应动作,执行到将输出轴目标转速发送给测功设备,以使测功设备按输出轴目标转速动动力总成的输出轴转动时,路谱的时刻增加预设时间,转至根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速的步骤,直至路谱运行结束。
69.在本实施例中,在进行循环工况时,工况输出当前时刻的目标车速的不断变化,实际车速的自动跟随目标车速进行混合动力联调循环测试。以c-wtvc工况为例,如图2所示的c-wtvc工况流程示意图,初始状态下(t=0s),测功设备(测功机)反馈的输出轴实际转速等于0。c-wtvc工况路谱输出目标车速,根据测功设备(测功机)反馈的输出轴实际转速,计算当前的实际车速,目标车速和实际车速通过驾驶员模型将出计算动力开度(制动踏板开度和油门开度),混合动力整车控制设备(混动总成-hcu)以此控制混动总成工作,混动总成工作输出扭矩,测功设备(测功机)采集输出扭矩,测功设备(测功机)将输出扭矩发送回硬件在环设备(hil),经过主减速模型、纵向动力学模型、车速计算模型和转速计算模型计算输出轴目标转速,将输出轴目标转速发送给测功设备(测功机),测功设备(测功机)按输出轴目标转速带动动力总成的输出轴转动,可得到输出轴实际转速,每运算一次后,c-wtvc工况路谱的时刻增加1s,输出当前时刻的目标车速,再根据测功设备(测功机)反馈的输出轴实际转速,计算当前时刻的实际车速,再根据当前目标车速和实际车速经驾驶员模型计算动力开度,继续执行混合动力联调测试过程中相应动作,如此往复不停循环,实现循环工况的车速自动跟随联调测试。如图3所示的c-wtvc工况路谱的车速变化曲线,横坐标为时间(单位s),纵坐标为车速(单位km/h),c-wtvc工况路谱实质是车速随时间变化的一条曲线,通过本方法保证目标车速按c-wtvc既定曲线对应时刻的车速输出,实现实际车速与路谱目标车速的自动跟随,可通过硬件在环设备的上位机同时观察实际车速和目标车速曲线。
70.当工况是循环工况时,计算出动力开度后,执行混合动力联调测试过程中相应动作,执行到测功设备按输出轴目标转速带动着动力总成的输出轴转动,将路谱的时刻增加预设时间,获得下一时刻的目标车速,再根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速,再通过目标车速和实际车速计算出动力开度,执行之后相应动作,实现循环工况控制,直至路谱运行结束。实现了在循环工况下,车速的自动跟随联调测试,可用于重型商用车标准工作循环c-wtvc工况、纯电汽车综合里程测试nedc工况等循环工况的自动循环测试,适用性强。
71.可选的,根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度,具体为:
72.根据工况输出当前时刻的目标车速计算目标阻力;
73.根据当前时刻的目标车速和当前时刻的实际车速,计算目标驱动力;
74.根据目标阻力和目标驱动力,计算目标合力;
75.根据目标合力,计算动力开度。
76.在本实施例中,根据工况模式或者循环工况路谱输出当前时刻的目标车速,根据工况输出当前时刻的目标车速计算目标阻力,利用滚阻计算模型和风阻计算模型依据目标车速计算出目标滚阻和目标风阻;利用爬坡阻力计算模型依据车重和坡度角计算出目标坡阻。
77.利用如图4所示的目标驱动力pid算法模型,依据目标车速和实际车速进行调节
实际制动力。
94.车速计算模型首先依据整车实际合力算出整车加速度(加速度=整车实际合力/质量),然后再将整车加速度对时间进行积分运算,计算得出模型车速;转速计算模型通过模型车速反算出输出轴目标车速转速,输出轴目标车速转速=(车速/轮胎半径)*主减比*(30/pi)。
95.将输出扭矩经过一系列计算,计算出输出轴目标转速,实现动力总成输出扭矩与输出轴转速之间相互关联,形成完整的自动闭环测试,从而可开展动力总成ev/od/ecvt/模式以及变速箱1/2档切换等功能的完整闭环测试,无需人工参与控制。
96.步骤105:将输出轴目标转速发送给测功设备,以使测功设备按输出轴目标转速带动动力总成的输出轴转动。
97.在本实施例中,通过can报文发送给测功设备,测功设备按硬件在环设备输出转速带着动力总成的输出轴转动,并通过can报文反馈实际转速给硬件在环设备;同时整车控制设备按输出轴实际转速计算出车速供内部工作模式作切换判断。
98.经上述步骤,实现混动台架的联调测试,根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速,根据工况输出当前时刻的目标车速和当前时刻的实际车速计算动力开度,使混合动力整车控制设备控制动力总成工作,根据动力总成的输出扭矩计算输出轴目标转速,按输出轴目标转速带着动力总成的输出轴转动,准确控制输出轴转速,反馈输出轴实际转速,实现实际车速自动跟随目标车速的混合动力联调测试,同时目标车速信号与输出扭矩关联变化,可开展不同工况模式进行车速自动跟随测试,保证了混动台架的测试完整度。
99.实施例二
100.相应地,参见图5,图5是本发明提供的硬件在环设备的实施例二的结构示意图。如图5所示,硬件在环设备包括转化计算模块501、驾驶员模块502、动力控制模块503、目标转速计算模块504和输出轴转动模块505;
101.其中,转化计算模块501用于根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速;
102.驾驶员模块502用于根据工况输出当前时刻的目标车速和当前时刻的实际车速,计算动力开度;
103.动力控制模块503用于将动力开度发送到混合动力整车控制设备,以使整车控制设备根据动力开度控制动力总成工作;
104.目标转速计算模块504用于接收测功设备采集的动力总成的输出扭矩,并根据输出扭矩,计算输出轴目标转速;
105.输出轴转动模块505用于将输出轴目标转速发送给测功设备,以使测功设备按输出轴目标转速带动动力总成的输出轴转动。
106.在本实施例中,硬件在环设备包括但不限于硬件在环hil机柜、hil上位机和hil测试模型。
107.可选的,驾驶员模块502包括目标阻力计算单元5021、目标驱动力计算单元5022、目标合力计算单元5023和动力开度计算单元5024;
108.其中,目标阻力计算单元5021用于根据工况输出当前时刻的目标车速计算目标阻
力;
109.目标驱动力计算单元5022用于根据当前时刻的目标车速和当前时刻的实际车速,计算目标驱动力;
110.目标合力计算单元5023用于根据目标阻力和目标驱动力,计算目标合力;
111.动力开度计算单元5024用于根据目标合力,计算动力开度,若目标合力为正值,则根据油门曲线,计算油门开度;若目标合力不为正值,则根据目标合力和最大制动力,计算制动踏板开度。
112.可选的,目标转速计算模块504包括轮端驱动力计算单元5041、实际行驶阻力计算单元5042、整车实际合力计算单元5043和输出轴目标转速计算单元5044;
113.其中,轮端驱动力计算单元5041用于接收测功设备采集的动力总成的输出扭矩,将输出扭矩经过主减速器模型放大后输入驱动力计算模型,通过驱动力计算模型,计算轮端驱动力;
114.实际行驶阻力计算单元5042用于根据目标合力和阻力模型,计算实际行驶阻力;
115.整车实际合力计算单元5043用于根据实际行驶阻力和轮端驱动力,计算整车实际合力;
116.输出轴目标转速计算单元5044用于根据整车实际合力计算模型车速,再根据模型车速,计算输出轴目标转速。
117.硬件在环设备用于混合动力联调测试,根据测功设备反馈的输出轴实际转速,计算当前时刻的实际车速,根据工况输出当前时刻的目标车速和当前时刻的实际车速计算动力开度,使混合动力整车控制设备控制动力总成工作,根据动力总成的输出扭矩计算输出轴目标转速,按输出轴目标转速带着动力总成的输出轴转动,准确控制输出轴转速,反馈输出轴实际转速,实现实际车速自动跟随目标车速的混合动力联调测试,同时目标车速信号与输出扭矩关联变化,可开展不同工况模式进行车速自动跟随测试。
118.实施例三
119.相应地,参见图6,图6是本发明提供的混合动力联调测试系统的实施例三的连接示意图。如图6所示,混合动力联调测试系统包括:整车控制设备601、硬件在环设备602、测功设备603和动力总成604;其中,硬件在环设备执行混合动力联调测试方法;
120.其中,设备的连接如下:硬件在环设备602与整车控制设备601连接,整车控制设备601与动力总成604连接,动力总成604与测功设备603连接,测功设备603与硬件在环设备602连接。
121.在本实施例中,整车控制设备包括但不限于混合动力整车控制器hcu和多合一控制器,硬件在环设备包括但不限于硬件在环hil机柜、hil上位机和hil测试模型,测功设备包括但不限于测功机和测功机操作台,动力总成包括但不限于发动机、变速箱、变速箱输出轴、电机和电池包(ev模式驱动时提供动力)。
122.可选的,其中,整车控制设备601用于根据动力开度控制动力总成工作;
123.硬件在环设备602用于执行混合动力联调测试方法;
124.测功设备603用于采集动力总成的输出扭矩,反馈输出扭矩给硬件在环设备,按输出轴目标转速带着动力总成的输出轴转动,并反馈输出轴实际转速给硬件在环设备;
125.动力总成604用于执行动力控制动作和输出轴转动动作。
126.本发明提供的混合动力联调测试系统通过整车控制设备、硬件在环设备、测功设备和动力总成之间形成闭环控制,可实现混动台架的车速跟随联调测试,可实现c-wtvc循环工况车速自动跟随测试;可实现输出轴转速与动力总成输出扭矩关联变化;可开展动力总成ev/od/ecvt/模式以及变速箱1/2档切换等功能的测试,保证了台架的测试完整度;测试系统方法原理还可改造用于纯电汽车nedc工况(纯电汽车综合里程测试工况)的自动循环测试,适用性强;
127.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步的详细说明,应当理解,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围。特别指出,对于本领域技术人员来说,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1