一种基于T-S模糊的并网同步控制系统大信号建模方法
一种基于t-s模糊的并网同步控制系统大信号建模方法
技术领域
1.本发明涉及电力电子并网同步控制技术领域,具体涉及一种基于t-s模糊的并网同步控制系统大信号建模方法。
背景技术:
2.随着当今社会的发展,环境污染越来越严重,可再生能源受到人们的青睐并被广泛利用。在未来,可再生能源(风力、光伏)将会成为我国供电的主要来源,而这些大量的可再生能源通过电力电子变换器作为电网接口,将会导致电力系统日益电力电子化,随之新能源并网的稳定性问题也日渐凸显出来。
3.目前,对于并网变换器暂态大信号暂态问题的研究尚处于初步探索阶段,相比于小扰动的稳定性,变换器的大信号暂态稳定性呈现出更为复杂的形式,并网系统展现出越来越强的非线性特征。并网同步控制是并网变换器的关键控制环节,承担着获取并网电压相位信息的功能,对逆变器内部控制具有重要的作用。然而,并网同步控制环节由于进行坐标变换,其控制过程是复杂非线性的。目前已有大量研究指出并网同步控制的稳定性直接影响整个并网系统的稳定运行。为此,基于小信号扰动的并网同步控制等效模型已受到广泛关注,并取得了显著成果。然而,目前仍缺乏能够准确描述并网同步控制大信号暂态行为的等效分析模型。为此,提出一种基于t-s模糊的并网同步控制系统大信号建模方法。
技术实现要素:
4.本发明所要解决的技术问题在于:如何能准确描述系统的非线性特性,便于利用数值方法求解系统的李雅普诺夫函数,对并网系统同步控制的稳定性分析具有重要的意义,提供了一种基于t-s模糊的并网同步控制系统大信号建模方法,基于传统的并网同步控制原理框图,建立系统的同步控制微分方程,使用t-s模糊理论逼近同步控制非线性系统,从而建立系统的大信号分析模型。
5.本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
6.s1:基于传统的并网同步控制系统的非线性模型,将静态工作点使用变量替换的方法转移到原点,分别对非线性模型当中两个状态变量求偏导,得到二阶雅可比矩阵;
7.s2:根据步骤s1中二阶雅可比矩阵,选取锁相环输出相角与稳定时相角之差x1(t)作为前置变量,确定x1(t)的论域;
8.s3:根据步骤s2中所确定的论域选择论域当中所需线性化的点,即线性化点;
9.s4:将步骤s3中所确定的线性化点分别代入到步骤s1中得到的二阶雅可比矩阵之中,得到分别与线性化点所对应的雅可比矩阵;
10.s5:根据步骤s4中所得到的与线性化点所对应的雅可比矩阵列列得到线性矩阵不等式组,通过当今完备的线性理论,如通过matlab软件中的lmi工具箱求得一个公共的正定矩阵p;如果能够找到正定矩阵p,返回步骤s2,扩大论域,直到找不到正定矩阵p,如果找不到正定矩阵p,返回步骤s2,缩小论域,直到找到正定矩阵p;如果始终找不到正定矩阵p,则
说明所述建模方法找不到系统的稳定域;最终得到x1(t)最大范围为(-c,c),c>0;
11.s6:根据步骤s5中x1(t)的最大范围重新选取线性化点;
12.s7:根据步骤s6中所确定的线性化点进行隶属度函数、模糊规则以及仿射项的确定,最终得到基于t-s模糊的并网同步控制系统等效模型。
13.更进一步地,在所述步骤s1中,传统的并网同步控制系统的非线性模型如下:
[0014][0015]
其中,α为锁相环pi控制器中积分器输出,k
p
和ki分别为pi控制器中的比例系数和积分系数,ic为并网电流幅值,vg为电网电压幅值,θ
pll
为锁相环输出相角,θg为电网相角,ωg电网角速度,lg为电网寄生电感,ic为参考电流幅值。
[0016]
更进一步地,在所述步骤s1中,将传统的并网同步控制系统关于锁相环的非线性模型的静态工作点转移到原点的模型如下:
[0017][0018]
其中,x1(t)为锁相环输出相角与系统稳定时输出相角之差,x2(t)为锁相环中pi控制器积分器输出与系统稳定输出之差,为稳定时锁相环输出相角与电网相角差。
[0019]
更进一步地,在所述步骤s1中,对转移到原点的模型中的x1(t)和x2(t)求偏导得到二阶雅可比矩阵j:
[0020][0021]
更进一步地,在所述步骤s2中,第一次确定x1(t)的论域时,将x1(t)的论域确定为0周围一个较小的邻域,如果步骤s5返回时能够找到正定矩阵p,则扩大上一次x1(t)所选的论域,直到找不到正定矩阵p,如果步骤s5返回时找不到正定矩阵p,则缩小上一次x1(t)所选的论域,直到找到正定矩阵p,此时x1(t)所选的论域为x1(t)最终所确定的论域。
[0022]
更进一步地,在所述步骤s3中,选择步骤s2中所确定的x1(t)论域的左右边界以及原点作为线性化点。
[0023]
更进一步地,在所述步骤s4中,将步骤s3中所确定的线性化点分别代入到步骤s1所确定的二阶雅可比矩阵中,得到矩阵ai:
[0024][0025]
其中i=1,2,3。
[0026]
更进一步地,在所述步骤s5中,根据步骤s4中所确定的雅可比矩阵列得到线性矩阵不等式组:
[0027][0028]
更进一步地,在所述步骤s5中,利用matlab软件中的lmi工具箱求得的公共正定矩阵p,如果lmi工具箱没有求出公共正定矩阵p,则说明在步骤s2中确定的论域选取偏大,则需要进一步减小论域,直到lmi工具箱能够找到公共正定矩阵p;如果直接就能够找到正定矩阵p,则说明在步骤s2中所确定的论域偏小,可以扩大论域,直到找不到正定矩阵p;最终所得到的论域为x1(t)最大范围为(-c,c),c>0。
[0029]
更进一步地,在所述步骤s6中,根据步骤s5中所确定的x1(t)的最大论域重新选取线性化点,分别为
±
c,
±
0.75c,
±
0.5c和0。
[0030]
更进一步地,在所述步骤s7中,根据步骤s6中所确定的线性化点来确定隶属度函数以模糊规则,并确定仿射项,最终得到需要的并网同步控制系统大信号的t-s模糊模型为:
[0031][0032][0033]
其中,r=7,i=1,2,3,4,5,6,7,ωi(x1(t))为前置变量x1每个线性点的隶属度,bi为仿射项,
[0034]
本发明相比现有技术具有以下优点:该一种基于t-s模糊的并网同步控制系统大信号建模方法,为并网同步控制的稳定性分析提供了新思路,在并网同步控制的稳定性分析当中,根据传统的并网同步控制系统模型选取李雅普诺夫函数具有一定的困难,然而,本发明所提出的并网同步控制系统大信号模型,利用matlab软件中的lmi工具箱可以很容易地找出李雅普诺夫函数,与传统的技术相比大大减小了并网同步控制大信号稳定性分析的
难度,值得被推广使用。
附图说明
[0035]
图1是本发明实施例中并网同步控制系统拓扑图;
[0036]
图2是本发明实施例中锁相环结构图;
[0037]
图3是本发明实施例中最大论域下并网同步控系统大信号的最大稳定域;
[0038]
图4是本发明实施例中并网同步控制系统大信号t-s模糊模型隶属度函数示意图;
[0039]
图5是本发明实施例中并网同步控制系统线性化前后系统动态响应对比图;
[0040]
图6是本发明实施例中并网同步控制系统线性化前后系统动态响应对比图;
[0041]
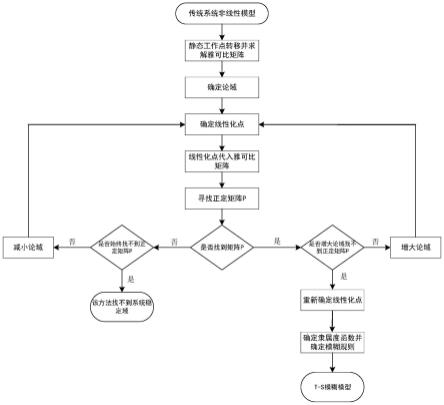
图7是本发明实施例中并网同步控制系统大信号建模流程图。
具体实施方式
[0042]
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0043]
如图7所示,本实施例提供一种技术方案:一种基于t-s模糊的并网同步控制系统大信号建模方法,包括以下步骤:
[0044]
步骤1:基于传统的并网同步控制系统的非线性模型,将静态工作点使用变量替换的方式转移到原点,分别对非线性模型当中两个状态变量求偏导,得到二阶雅可比矩阵;
[0045]
步骤2:根据步骤1中的二阶雅可比矩阵,选取锁相环输出相角与稳定时相角之差x1(t)作为前置变量,确定x1(t)的论域;
[0046]
步骤3:根据步骤2中所确定的论域选择论域当中所需线性化的点,即线性化点;
[0047]
步骤4:将步骤3中所确定的线性化点分别代入到步骤1中得到的二阶雅可比矩阵之中,得到分别与线性化点所对应的雅可比矩阵;
[0048]
步骤5:根据步骤4中所得到的与线性化点所对应的雅可比矩阵列列写出线性矩阵不等式组,通过当今完备的线性理论,如通过matlab软件中的lmi工具箱寻找一个公共的正定矩阵p;如果能找到正定矩阵p,返回步骤2,适当扩大论域,直到找不到正定矩阵p,如果找不到正定矩阵p,返回步骤2,适当缩小论域,直到找到正定矩阵p,如果始终找不到正定矩阵p,则说明该方法找不到系统的稳定域;最终得到x1(t)最大范围为(-c,c),c>0,;
[0049]
步骤6:根据步骤5中x1(t)的最大范围重新选取线性化点;
[0050]
步骤7:根据步骤6中所确定的线性化点进行隶属度函数、模糊规则以及仿射项的确定,最终得到基于t-s模糊模型并网同步控制系统等效模型。
[0051]
对本方法的具体说明如下:
[0052]
并网同步控制系统拓扑图如图1所示,锁相环结构如图2所示,在并网同步控制当中,将并网变换器等效为电流源,ic为参考电流幅值,θ
pll
为锁相环输出相角,zg为电网寄生电阻,lg为电网寄生电感,vg为电网幅值,θg为电网相角。
[0053]
本实施例中系统的并网电流的参考值ic为3.93a,参考电流相角为锁相环输出相角,电网电压的幅值vg为120v,电网频率为50hz,电网寄生电阻zg为0.5ω,电网寄生电感lg为0.001h,比例系数k
p
为1.457,积分系数ki为129.4813。
[0054]
根据图1所得出的传统的非线性模型为:
[0055][0056]
其中,α为锁相环pi控制器中积分器输出,θ
pll
为锁相环输出相角,θg为电网相角,ωg电网角速度。
[0057]
令式(1)左边为0即工作在稳定时:
[0058][0059]
得到θ
pll
=θ
pll0
,α=α0,令x1=θ
pll-θ
pll0
,x2=α-a0将传统非线性模型静态工作点转移到原点之后的模型如式(2)所示:
[0060][0061]
其中,线路阻抗对锁相环输出的影响相角,将式(3)对x1(t)、x2(t)分别求偏导,得出雅可比矩阵j(二阶雅可比矩阵)如式(4)所示:
[0062][0063]
根据步骤2,选取x1为前置变量,第一次选取x1论域为0周围较小的邻域,为
±
0.05π,将
±
0.05π和0分别代入到式(4)中,得到ai:
[0064][0065]
i=1,2,3,根据ai可得到线性矩阵不等式组:
[0066][0067]
通过当今完备的线性理论,如通过matlab软件中的lmi工具箱可以找到正定矩阵
[0068]
根据步骤5继续扩大论域,扩大论域到
±
0.2π,依旧可以找到正定矩阵一直将论域扩大到
±
0.44π,在这之间都可以找到正定矩阵p,即论域的最大范围为
±
0.44π。
[0069]
根据步骤6选取线性化点分别为
±
0.44π,
±
0.33π,
±
0.22π和0;最终所选取的正定矩阵为李雅普诺夫函数v(x(t))=x(t)
t
px(t),令0=即可确定系统的最大稳定域,如图3所示,其中
[0070]
根据步骤7选取隶属度函数,如式(7)-(13)所示,函数图像如图4所示:
[0071][0072][0073][0074][0075][0076][0077][0078]
确定模糊规则为:
[0079]
1)如果x1在-0.44π附近,则状态空间矩阵a=a1;
[0080]
2)如果x1在-0.33π附近,则状态空间矩阵a=a2;
[0081]
3)如果x1在-0.22π附近,则状态空间矩阵a=a3;
[0082]
4)如果x1在0附近,则状态空间矩阵a=a4;
[0083]
5)如果x1在0.22π附近,则状态空间矩阵a=a5;
[0084]
6)如果x1在0.33π附近,则状态空间矩阵a=a6;
[0085]
7)如果x1在0.44π附近,则状态空间矩阵a=a7;
[0086]
最终得到并网同步控制系统的t-s模糊模型为:
[0087][0088][0089]
在式(14)中r=7,i=1,2,3,4,5,6,7,ωi(x1(t))为前置变量x1每个线性点的隶属度,式(15)中bi为仿射项,b
11
=313.6562,b
12
=141.2648,b
13
=40.9811,b
14
=-4.5624,b
15
=-52.0319,b
16
=-154.0522,b
17
=-327.7557,b
21
=86.1127,b
22
=38.7835,b
23
=11.2512,b
24
=-1.2526,b
25
=-14.2851,b
26
=-42.2942,b
27
=-89.9836。
[0090]
如图5和图6为并网逆变器同步控制系统动态特性验证,分别在0.05s以及0.1s时设置0.2π和0.4π的输出相角跳变,可见该并网同步控制大信号模型与传统模型动态特性一致,即本发明所提出的并网同步控制大信号模型具有正确性。
[0091]
综上所述,上述实施例的一种基于t-s模糊的并网同步控制系统大信号建模方法,为并网同步控制的稳定性分析提供了新思路,在并网同步控制的稳定性分析当中,根据传统的并网同步控制系统模型选取李雅普诺夫函数具有一定的困难,然而,本发明所提出的并网同步控制系统大信号模型,利用matlab软件中的lmi工具箱可以很容易地找出李雅普诺夫函数,与传统的技术相比大大减小了并网同步控制大信号稳定性分析的难度,值得被推广使用。
[0092]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1