一种分布式的水面舰艇和水下航行器协同控制系统和方法
1.本发明涉及无人水面舰艇与水下航行器的技术领域,尤其涉及一种分布式的水面舰艇和水下航行器协同控制系统,以及这种分布式的水面舰艇和水下航行器协同控制系统所采用的方法,用于实现多台无人的水面和水下航行器可重构编队控制和目标跟踪控制。
背景技术:
2.异构多平台多机协同控制技术,可以弥补单个水面或水下航行器(统称“航行器”)的不足,具有良好的可拓展性,能够执行更复杂、持续时间更久、覆盖范围更广的任务,成为近海、远海观测与目标探测的重要手段。水面与水下航行器的协同控制能够充分利用各自优势,实现水面与水下的同时、同步观测,或敏捷的水下目标探测,一方面提高了海洋在时间和空间的观测精度,实现分布式的感知,另一方面提升了获得水下目标的探测信息的及时性,并可实现多机的追踪。近年来,随着多智能体技术的成熟和应用,水面与水下航行器领域也开展了协同控制方向的研究,但多局限于各自领域。面向一致性的异构多机协同控制是一类控制算法,每个航行器通过水下通讯仅需获取临近航行器的信息,即可实现与其他航行器的协同。
3.分布式的异构水面和水下航行器协同控制是指每个航行器从任意初始态出发,通过水下通讯获得邻居信息,利用其装载的协同控制算法,实现与其他航行器协同的,达成状态一致。
4.目前国内外学者分别在水面舰艇、水下航行器的协同控制方面做的一定工作,主要集中在采用人工势能场法、虚拟结构、基于行为、基于图论等。以上控制针对单个种类,目前尚缺少对具有不同动力学特征的跨平台航行器的分布式控制系统和方法。
技术实现要素:
5.为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种分布式的水面舰艇和水下航行器协同控制系统,其一方面实现异构多航行器可按照期望的可重构的编队队形进行海洋观测和目标探测,增强了可拓展性和鲁棒性,另外一方面实现异构多航行器协同地对目标进行追踪。
6.本发明的技术方案是:这种分布式的水面舰艇和水下航行器协同控制系统,其包括一个岸基控制中心和航行器队列;
7.航行器为水面舰艇asv或水下航行器auv,每个航行器具有定位模块、通讯模块、协同控制器、点位跟踪控制器、执行器;航行器队列由若干asv和auv组成;
8.岸基控制中心依据任务需求发出编队队形结构d指令给asv;
9.asv通过定位模块和通讯模块获得本体、临近auv和asv航位状态信息以及编队队形结构d指令,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制;
10.auv通过本体惯导装置获得本体航位信息,并通过通讯模块获得
11.asv航位信息以矫正本体航位状态,通过通讯模块获得临近auv和asv航位状态信息,通过水听器获得目标状态信息,通过通讯模块发送本体航位信息给临近auv和asv,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制。
12.本发明通过岸基控制中心依据任务需求发出编队队形结构d指令给asv,asv通过定位模块和通讯模块获得本体、临近auv和asv航位状态信息以及编队队形结构d指令,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制,auv通过本体惯导装置获得本体航位信息,并通过通讯模块获得asv航位信息以矫正本体航位状态,通过通讯模块获得临近auv和asv航位状态信息,通过水听器获得目标状态信息,通过通讯模块发送本体航位信息给临近auv和asv,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制本体航位信息,因此一方面实现异构多航行器可按照期望的可重构的编队队形进行海洋观测和目标探测,增强了可拓展性和鲁棒性,另外一方面实现异构多航行器协同地对目标进行追踪。
13.还提供了一种分布式的水面舰艇和水下航行器协同控制系统的工作方法,其包括以下步骤:
14.(1)岸基控制中心依据任务需求发出编队队形结构d指令给asv;
15.(2)asv通过通讯模块获得本体、临近auv和asv航位状态信息以及编队队形结构d指令,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制;
16.(3)auv通过本体惯导装置获得本体航位信息,并通过通讯模块获得asv航位信息以矫正本体航位信息状态,通过通讯模块获得临近auv和asv航位状态信息,通过水听器获得目标状态信息,通过通讯模块发送本体航位信息给临近auv和asv,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行轨迹跟踪控制。
附图说明
17.图1是根据本发明的分布式的水面舰艇和水下航行器协同控制系统的异构多航行器系统通讯示意图。
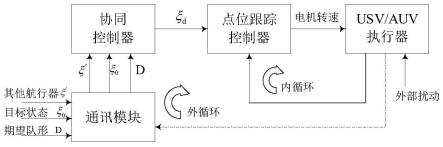
18.图2是根据本发明的分布式的水面舰艇和水下航行器协同控制系统的一个航行器的控制系统结构图。
19.图3是根据本发明的adrc点位跟踪控制图。
20.图4是根据本发明的分布式的水面舰艇和水下航行器协同控制系统的工作方法的流程图。
具体实施方式
21.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
22.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“包括”以及任
何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他步骤或单元。
23.如图1-4所示,这种分布式的水面舰艇和水下航行器协同控制系统,其包括一个岸基控制中心和航行器队列;
24.航行器为水面舰艇asv或水下航行器auv,每个航行器具有定位模块、通讯模块、协同控制器、点位跟踪控制器、执行器;航行器队列由若干asv和auv组成;
25.岸基控制中心依据任务需求发出编队队形结构d指令给asv;
26.asv通过定位模块和通讯模块获得本体、临近auv和asv航位状态信息以及编队队形结构d指令,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制;
27.auv通过本体惯导装置获得本体航位信息,并通过通讯模块获得
28.asv航位信息以矫正本体航位状态,通过通讯模块获得临近auv和asv航位状态信息,通过水听器获得目标状态信息,通过通讯模块发送本体航位信息给临近auv和asv,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制。
29.本发明通过岸基控制中心依据任务需求发出编队队形结构d指令给asv,asv通过定位模块和通讯模块获得本体、临近auv和asv航位状态信息以及编队队形结构d指令,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制,auv通过本体惯导装置获得本体航位信息,并通过通讯模块获得asv航位信息以矫正本体航位状态,通过通讯模块获得临近auv和asv航位状态信息,通过水听器获得目标状态信息,通过通讯模块发送本体航位信息给临近auv和asv,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制本体航位信息,因此一方面实现异构多航行器可按照期望的可重构的编队队形进行海洋观测和目标探测,增强了可拓展性和鲁棒性,另外一方面实现异构多航行器协同地对目标进行追踪。优选地,在执行目标探测跟踪任务时,岸基控制中心通过auv、asv、岸基控制中心的路径获得的一个或多个目标状态信息,进行数据融合处理并加以辨识。
30.优选地,当没有目标跟踪任务时,采用leader-follower模式时,其中一台asv作为领航者,依据任务需求按照指定的轨迹行进,并通过与卫星通讯获取其自身的航位状态信息,并将该信息通过声通讯模块发送给临近的auv,用无线通讯发送给临近的跟随者asv。
31.如图4所示,还提供了一种分布式的水面舰艇和水下航行器协同控制系统的工作方法,其包括以下步骤:
32.(1)岸基控制中心依据任务需求发出编队队形结构d指令给asv;
33.(2)asv通过通讯模块获得本体、临近auv和asv航位状态信息以及编队队形结构d指令,通过协同控制器生成下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行点位跟踪控制;
34.(3)auv通过本体惯导装置获得本体航位信息,并通过通讯模块获得asv航位信息以矫正本体航位信息状态,通过通讯模块获得临近auv和asv航位状态信息,通过水听器获得目标状态信息,通过通讯模块发送本体航位信息给临近auv和asv,通过协同控制器生成
下个时刻的航位和速度状态信息,通过点位跟踪控制器和执行器进行轨迹跟踪控制。
35.优选地,在步骤(1)之前执行:在执行目标探测跟踪任务时,岸基控制中心通过auv、asv、岸基控制中心的路径获得的一个或多个目标状态信息,进行数据融合处理并加以辨识。
36.优选地,所述步骤(2)中,当没有目标跟踪任务时,采用leader-follower模式时,其中一台asv作为领航者,依据任务需求按照指定的轨迹行进,并通过与卫星通讯获取其自身的航位状态信息,并将该信息通过声通讯模块发送给临近的auv,用无线通讯发送给临近的跟随者asv。
37.另外,分布式的水面舰艇和水下航行器协同控制系统的工作方法,包括:(1)协同控制器:采用图论方法建立目标/领航者与跟随者的通讯拓扑结构,形成拓扑结构矩阵,设计协同控制律,通过系统特征获得控制参数,依据输入的其他航行器状态信息和期望编队结构d指令,结合控制算法,生成下个时刻的航位和速度状态信息;(2)点位跟踪控制器:根据当前状态与期望状态的差值并结合asv/auv运动学模型获得在机体坐标系下的速度和角速度期望状态,依据系统模型建立状态观测器,通过反馈获得控制输入,形成闭环反馈控制。
38.优选地,所述特征(1)中,协同控制器进行以下操作:
39.采用图论方法建立目标/领航者与跟随者的通讯拓扑结构,形成随机拓扑结构矩阵集合;
40.各航行器自带惯导导航定位装备和声通讯装置,通过卫星/惯导获得自身的状态ξ,通过无线通讯/声通讯装置获得其他航行器的位置坐标ξ
′
;设总共有n个asv与auv,协同控制模块获得其他航行器状态期望编队队形d=[d
l
,df],其中μ(t)=[x(t),y(t),z(t)]
t
代表惯性坐标下的位置矢量,代表惯性坐标下速度矢量,d
l
指其他航行器与领航者的队形矩阵,df指航行器之间的队形矩阵,目标状态期望编队队形依据任务需求在线调整,并且d
l
+df=(d
l1
+d
f1
)1n[0041]
采用随机切换拓扑的协同控制律:
[0042][0043]
其中c
1i
,c
2i
为耦合强度参数矩阵,为跟随者航行器随机拓扑拉普拉斯矩阵的元素,其由跟随者航行器间通讯拓扑结构决定,为领航者与跟随者随机拓扑矩阵元素,其由领航者与跟随者的通讯拓扑结构决定,为加速度极限值;
[0044]
设为从领航者到跟随者为一个有向生成树的通讯拓扑图,是图中的一个拉普拉斯矩阵,存在一个m∈rn×
(n-1)
矩阵使得e矩阵为(n-1)
×
n阶矩阵,e=[1,-1,0,0,0;0,1,-1,0,0;0,0,1,-1,0;0,0,0,1,-1];
[0045]
设一类拓扑满足令
[0046]
则选取一个正定矩阵p>0,且使得不等式成立,其中
[0047]ci
=[c
1i
,c
1i
]
t
=b
it
p
ꢀꢀꢀ
(2)
[0048]
将公式(1)依据动力学方程解得ξi,标记为ξd并将其输出。
[0049]
优选地,所述特征(2)中,点位跟踪控制器进行以下操作:
[0050]
该模块的输入为协同控制模块的输出,该模块的输出为电机转速
[0051]
trans1为:
[0052][0053]
其中是asv/auv的偏转角度极限值,q=[ω
x
,ωy,ωz]
[0054][0055][0056]
trans2为:
[0057][0058]
其中,u为asv/auv的控制输入,为偏转速度极限,z2为观测器输出项,b0为惯性质量近似常量矩阵;
[0059]
观测器eso为:
[0060][0061][0062]
其中本发明的有益技术效果如下:
[0063]
1、该协同控制方法采用模块化设计,将协同控制器与轨迹跟踪器结合以实现异构多航行器的可重构编队控制,增强了系统的可拓展性和鲁棒性。
[0064]
2、同时可以实现异构多航行器协同地对目标进行跟踪。
[0065]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1